技术特征:
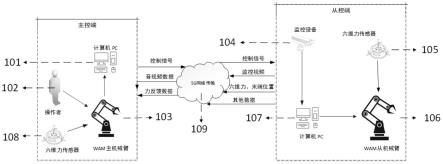
1.一种基于同构型机械臂的遥操作系统,其特征在于,包括主控端和从控端,主控端包括主机械臂、主计算机pc和第一6维力/力矩传感器,所述第一6维力/力矩传感器安装于主机械臂末端的法兰位置,主机械臂和主计算机pc通过局域网连接;从控端包括从机械臂、从计算机pc、第二6维力/力矩传感器和监控设备,所述第二6维力/力矩传感器安装于从机械臂末端的法兰位置,所述从机械臂和监控设备均与所述从计算机pc连接,所述监控设备为视频监控设备;所述主计算机pc和从计算机pc之间通信连接,监控设备采集到的音视频信息在主计算机pc上显示和播放。2.根据权利要求1所述的基于同构型机械臂的遥操作系统,其特征在于,所述从控端接收所述主控端的控制信号,控制所述从机械臂跟随主机械臂作同步动作;所述主控端接收所述第二6维力/力矩传感器的检测信息,所述主机械臂通过控制主机械臂上的关节扭矩复现所述从机械臂上的6维力/力矩信息。3.根据权利要求2所述的基于同构型机械臂的遥操作系统,其特征在于,所述主控端将主机械臂末端所要实现的力矩信息转化为主机械臂的关节扭矩输出给主机械臂的pid控制器。4.根据权利要求2所述的基于同构型机械臂的遥操作系统,其特征在于,所述主控端和从控端均设有滤波器,对接收到的信号进行滤波处理。5.根据权利要求1所述的基于同构型机械臂的遥操作系统,其特征在于,所述主计算机pc和从计算机pc之间通过5g网络通道进行数据交互,采用的设备为cpe设备。6.根据权利要求1所述的基于同构型机械臂的遥操作系统,其特征在于,所述主机械臂和从主机械臂均为wam机械臂。7.根据权利要求1所述的基于同构型机械臂的遥操作系统,其特征在于,所述从计算机pc与所述从机械臂通过局域网连接,所述监控设备通过usb数据线与从计算机pc连接。
技术总结
本实用新型公开了一种基于同构型机械臂的遥操作系统,基于同构型机械臂的遥操作系统包括主控端和从控端,主控端包括主机械臂、主计算机PC和第一6维力/力矩传感器,主机械臂和主计算机PC通过局域网连接;从控端包括从机械臂、从计算机PC、第二6维力/力矩传感器和监控设备;所述主计算机PC和从计算机PC之间通信连接;所述从机械臂跟随主机械臂作同步动作;所述主机械臂通过控制主机械臂上的关节扭矩复现所述从机械臂上的6维力/力矩信息。本实用新型用以提升用户在主控端的操作流畅性、增强用户对从控端作业环境的力感知和视觉感知水平。户对从控端作业环境的力感知和视觉感知水平。户对从控端作业环境的力感知和视觉感知水平。
技术研发人员:周玉康 臧家炜 李子健 费艺军
受保护的技术使用者:埃斯顿(南京)医疗科技有限公司
技术研发日:2022.07.14
技术公布日:2022/11/21
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。