1.本技术涉及换电技术领域,尤其涉及一种换电设备及其换电方法。
背景技术:
2.为响应全球节能减排号召,近年来,以燃油为动力源的机械设备逐渐被电动机械设备取代。市场上提供了为电动设备直接换电的换电设备,换电设备具有换电机器人和充电仓,充电仓内排列有固定电池箱并为电池箱充电的电池箱固定座,这些电池箱固定座并不能全部用于存放电池箱,需要预留空位用于暂存由换电车上卸下的亏电电池箱,如此使得充电仓内的电池箱固定座不能够被全部有效的使用,存在一定的浪费。
3.有鉴于此,特提出本发明。
技术实现要素:
4.本发明提供一种换电设备及其换电方法。
5.本技术提供如下技术方案:
6.本技术第一目的在于提供一种换电设备,包括:
7.换电机器人,所述换电机器人能沿设定轨迹往复移动,所述换电机器人具有抓取电池箱的抓取机构;
8.电池箱暂存座,所述电池箱暂存座位于所述设定轨迹上,所述电池箱暂存座用于暂存换电机器人抓取的电池箱。
9.可选的,换电设备包括至少两个电池箱暂存座,各所述电池箱暂存座沿所述设定轨迹依次设置,至少两个所述电池暂存座之间具有供换电机器人执行换电动作的换电工位。
10.可选的,在沿所述设定轨迹的方向上,所述换电工位的延伸长度不小于所述电池箱暂存座或电池箱的延伸长度。
11.可选的,所述换电机器人具有行走机构,所述行走机构用于在换电机器人将待换电车上的亏电电池箱转移至一所述电池箱暂存座时,驱动换电机器人向另一所述电池箱暂存座一侧移动,以抓取目标满电电池箱。
12.可选的,所述抓取机构包括多级伸缩臂架和抓具,所述抓具连接于所述多级伸缩臂架的端部;
13.所述多级伸缩臂架能沿垂直设定轨迹的方向双向伸缩,以将位于设定轨迹一侧的待换电车上的亏电电池箱转移至所述电池箱暂存座,将位于所述设定轨迹另一侧的电池箱固定座上的满电电池箱转移至待换电车上,将电池箱暂存座上的亏电电池箱转移至电池箱固定座上。
14.可选的,所述换电机器人具有两个侧部移动架,两个所述侧部移动架沿垂直设定轨迹的方向依次间隔设置;
15.所述抓取机构连接于两个所述侧部移动架上;
16.在沿垂直所述设定轨迹的方向上,两个所述侧部移动架的间距大于所述电池箱暂存座的长度;
17.所述换电机器人能沿设定轨迹移动经过所述电池箱暂存座。
18.可选的,每一所述侧部移动架均包括两个立柱,两个所述立柱沿所述设定轨迹的长度方向依次设置,两个所述立柱之间具有避让电池箱的避让空间。
19.可选的,换电设备包括沿所述设定轨迹延伸设置的两个导轨,两个所述导轨间隔设置;
20.所述电池箱暂存座设置于两个所述导轨之间;
21.所述换电机器人可移动地连接于两个所述导轨上。
22.可选的,所述电池箱暂存座沿垂直所述导轨的方向延伸。
23.可选的,所述电池箱暂存座具有水平框架和凸出设置于所述水平框架的导向组件;
24.电池箱能沿所述导向组件滑动至支撑于所述水平框架上。
25.可选的,所述导向组件包括多个导向体,各所述导向体分布于框架体的不同位置上,各所述导向体均具有倾斜的导向面。
26.可选的,换电设备还包括多个电池箱固定座,各所述电池箱固定座均位于所述设定轨迹的一侧,且各所述电池箱固定座沿所述设定轨迹依次排列。
27.本技术第二目的在于提供换电设备的换电方法,包括:
28.步骤s1、换电机器人行进至换电工位,并抓取待换电车上的亏电电池箱;
29.步骤s2、换电机器人沿设定轨迹行进至所述电池箱暂存座,并将亏电电池箱装入所述电池箱暂存座;
30.步骤s3、换电机器人沿设定轨迹移动至目标满电电池箱对应的位置,并抓取目标满电电池箱;
31.步骤s4、换电机器人运行至所述换电工位将目标满电电池箱装入所述待换电车。
32.可选的,换电设备的换电方法包括两个电池箱暂存座,两个所述电池箱暂存座之间具有换电工位;
33.在步骤s2中,换电机器人将亏电电池箱转移至一所述电池箱暂存座;
34.在步骤s3中,换电机器人向另一所述电池箱暂存座所在的一侧移动,直至行进至目标满电电池箱。
35.可选的,抓取机构包括多级伸缩臂架和抓具,所述抓具连接于所述多级伸缩臂架的端部;
36.在步骤s1中,抓取机构能向第一方向伸出,抓取待换电车上的亏电电池箱;
37.在步骤s2中,抓取机构能回缩将亏电电池箱转移至电池箱暂存座;
38.在步骤s3中,抓取机构能向第二方向伸出,抓取目标满电电池箱;
39.其中,第一方向和第二方向为垂直于设定轨迹的两个相反的方向。
40.通过采用上述技术方案,使得本技术具有如下有益效果:
41.本技术通过在设定轨迹上设置电池箱暂存座,可以暂存由待换电车辆上拆卸的电池箱,不需要在换电设备的充电仓内预留空位,使得充电仓能够保持满载电池箱,提升了充电仓的电池箱装载量。
42.下面结合附图对本发明的具体实施方式作进一步详细的描述。
附图说明
43.附图作为本技术的一部分,用来提供对本发明的进一步的理解,本发明的示意性实施例及其说明用于解释本发明,但不构成对本发明的不当限定。显然,下面描述中的附图仅仅是一些实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。在附图中:
44.图1示出本技术实施例提供的换电设备的局部结构示意图;
45.图2示出本技术实施例提供的换电设备的换电仓的立体结构示意图;
46.图3示出图2中a部放大图;
47.图4示出本技术实施例提供的换电设备的换电仓的俯视视角图;
48.图5为图4中b部发大图;
49.图6示出本技术实施例提供的换电设备的换电仓的另一视角图;
50.图7示出本技术实施例提供的换电设备的换电仓上吊装避让孔外露的立体结构示意图;
51.图8示出图7中c部放大图;
52.图9示出本技术实施例提供的换电仓上吊装避让孔被盖体覆盖封闭的状态示意图;
53.图10示出图9中d部放大图;
54.图11示出本技术实施例提供的换电仓的顶部框架的结构示意图;
55.图12示出本技术实施例提供的换电仓的立体示意图;
56.图13示出图12中e部放大图;
57.图14示出图12中f部放大图;
58.图15示出本技术实施例提供的换电仓的门体处于闭合状态的示意图;
59.图16示出本技术实施例提供的换电仓的内部结构示意图;
60.图17示出图16中g部放大图;
61.图18示出图16中h部放大图;
62.图19示出本技术实施例提供的充电仓的爆炸图;
63.图20示出图19中i部放大图;
64.图21示出本技术实施例提供的充电仓的充电仓的上箱壳的立体图;
65.图22示出图21中j部放大图;
66.图23示出本技术实施例提供的充电仓的充电底箱的内部结构示意图;
67.图24为图23的另一视角图。
68.图中:100、换电仓;1、仓壳;11、侧壁;111、第一侧壁;112、第二侧壁;12、门洞;13、顶壁;131a、主梁;131b、横梁;132、吊装避让孔;133、第一侧盖板;134、第二侧盖板;135、盖体配合框架;1351、第一配合梁;1352、第二配合梁;135a、上延伸板;1353、连接座;14、盖体;141、连接耳;142、透光板;143、起吊配合部;15、底壁;16、导轨;2、门体;21、滚轮组件;211、支架;212、第一滚轮;213、第二滚轮;22、铰接座;23、第一触发部;24、第二触发部;3、滑轨;4、驱动机构;41、固定梁;42、固定部;43、伸缩部;5、闭合到位传感器;6、开门到位传感器;7、
电池箱暂存座;71、水平框架;72、导向体;8、底箱架;9、换电机器人;91、多级伸缩臂架;92、抓具;93、侧部移动架;931、立柱;200、充电仓;210、充电底箱;2110、升降支腿;2120、电池箱固定座;2130、导向部件;214、栅格窗;215、排风管道;216、支架;220、充电机;230、上箱壳;231、顶壁;2311、主板体;2312、集水板;2312a、集水槽;232、导向配合孔;233、换电避让口;240、排水管;250、转接盒;260、固定件。
69.需要说明的是,这些附图和文字描述并不旨在以任何方式限制本发明的构思范围,而是通过参考特定实施例为本领域技术人员说明本发明的概念。
具体实施方式
70.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本发明,但不用来限制本发明的范围。
71.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
72.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
73.实施例一
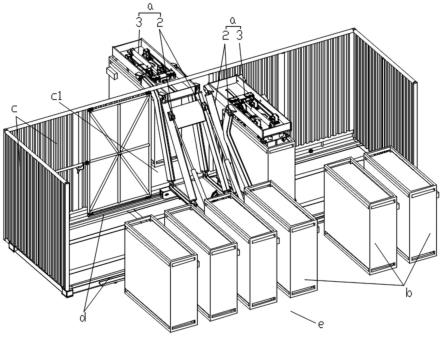
74.参见图1至图24所示,本技术实施例提供一种换电设备,包括:换电机器人9和电池箱暂存座7。换电机器人9能沿设定轨迹往复移动,所述换电机器人9具有抓取电池箱的抓取机构。电池箱暂存座7位于所述设定轨迹上,所述电池箱暂存座7用于暂存换电机器人9抓取的电池箱。本技术通过在设定轨迹上设置电池箱暂存座7,可以暂存由待换电车辆上拆卸的电池箱,不需要在换电设备的充电仓200内预留空位,使得充电仓200能够保持满载电池箱,提升了充电仓的电池箱装载量。
75.在一种可能的实施方案中,参见图1至图3所示,换电设备包括至少两个电池箱暂存座7,各所述电池箱暂存座7沿所述设定轨迹依次设置,至少两个所述电池暂存座之间具有供换电机器人9执行换电动作的换电工位。
76.通过在换电工位两侧分别设置电池箱暂存座7,则换电机器人9可根据需要抓取的目标满电电池箱的位置将抓取的待换电车上的亏电电池箱放置于相应的电池箱暂存座7上。例如,当换电机器人9需要抓取位于换电工位左侧的满电电池箱时,可以先抓取待换电车上的亏电的电池箱并装入换电工位右侧的电池箱暂存座7上,不阻挡换电机器人9后续向左侧移动。方便换电机器人9顺利完成换电任务。
77.在一种可能的实施方案中,在沿所述设定轨迹的方向上,所述换电工位的延伸长度不小于所述电池箱暂存座7或电池箱的延伸长度。如此,在换电机器人9抓取满电的电池箱运行至换电工位并带动电池箱沿垂直设定轨迹平移过程中,满电的电池箱不会和电池箱暂存座7上的亏电的电池箱发生干涉,确保换电过程中的安全性。其中,设定轨迹可以使沿
着换电设备的换电仓的长度方向。
78.在一种可能的实施方案中,所述换电机器人9具有行走机构,所述行走机构用于在换电机器人9将待换电车上的亏电电池箱转移至一所述电池箱暂存座7时,驱动换电机器人9向另一所述电池箱暂存座7一侧移动,以抓取目标满电电池箱。行走机构可以为设置于换电机器人底部的车轮。
79.该实施方案中,在换电过程中,换电机器人9将亏电的电池箱放置的电池箱暂存座7的位置和换电机器人9抓取的目标满电电池箱的位置相反,确保亏电的电池箱不阻挡换电机器人9抓取满电的电池箱,确保换电任务顺利完成。
80.参见图1所示,换电设备还具有多个电池箱固定座2120,各所述电池箱固定座2120均位于所述设定轨迹的一侧,且各所述电池箱固定座2120沿所述设定轨迹依次排列。各电池箱固定座2120可以设置于充电仓200内。
81.在一种可能的实施方案中,参见图3所示,所述抓取机构包括多级伸缩臂架91和抓具92,所述抓具92连接于所述多级伸缩臂架91的端部。所述多级伸缩臂架91能沿垂直设定轨迹的方向双向伸缩,以将位于设定轨迹一侧的待换电车上的亏电的电池箱转移至所述电池箱暂存座7,将位于所述设定轨迹另一侧的电池箱固定座2120上的满电电池箱转移至待换电车上,将电池箱暂存座7上的亏电电池箱转移至电池箱固定座2120上。
82.所述换电机器人9具有两个侧部移动架93,两个所述侧部移动架93沿垂直设定轨迹的方向依次间隔设置。所述抓取机构连接于两个所述侧部移动架93上。在沿垂直所述设定轨迹的方向上,两个所述侧部移动架93的间距大于所述电池箱暂存座7的长度。所述换电机器人9能沿设定轨迹移动经过所述电池箱暂存座7,不会和电池箱暂存座7产生干涉。
83.每一所述侧部移动架93均包括两个立柱931,两个所述立柱931沿所述设定轨迹的长度方向依次设置,两个所述立柱931之间具有避让电池箱的避让空间。在多级伸缩臂架91沿垂直设定轨迹的方向相向伸缩的过程中,抓取的电池箱能顺利经过两个立柱931之间,并不会和两个立柱931产生干涉。
84.在一种可能的实施方案中,换电设备包括沿所述设定轨迹延伸设置的两个导轨16,两个所述导轨间隔设置。电池箱暂存座7设置于两个所述导轨16之间。所述换电机器人9可移动地连接于两个所述导轨上。换电机器人9的两个侧部移动架93分别可滑动地连接于两个导轨上,侧部移动架93的两个立柱931则沿导轨长度方向依次设置。电池箱暂存座7设置于两个所述导轨之间不阻挡换电机器人9沿导轨行进。
85.在一种可能的实施方案中,参见图4和图5所述电池箱暂存座7沿垂直所述导轨的方向延伸,电池箱暂存座7和充电仓内的电池箱固定座2120的排列方位一致,方便换电机器人9执行统一的动作实现取放电池箱固定座2120和电池箱暂存座7上的电池箱。
86.在一种可能的实施方案中,电池箱暂存座7具有水平框架71和凸出设置于所述水平框架71的导向组件。电池箱能沿所述导向组件滑动至支撑于所述水平框架71上。
87.换电机器人9上还设置升降机构,抓具92连接于升降机构,升降机构能够带动抓具92升降运动。在需要将电池箱装入电池箱暂存座7时,首先多级伸缩臂架91处于回缩状态,升降机构逐渐下放抓具92使得电池箱接触导向组件并沿导向部件逐渐下落直至稳定地支撑于电池箱暂存座7。
88.在一种可能的实施方案中,所述导向组件包括多个导向体72,各所述导向体72分
布于框架体的不同位置上,各所述导向体72均具有倾斜的导向面。在电池箱底部周壁能沿着导向面下滑直至稳定支撑于电池箱暂存座7的水平框架71,导向体72除了起到导向作用外还起到限位作用,防止电池箱移位或倾斜。
89.实施例二
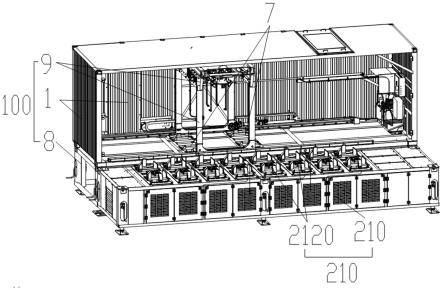
90.参见图2至图6所示,本技术实施例二对换电设备进行进一步说明。换电设备包括换电仓100和充电仓。换电仓100,包括:底箱架8、仓壳1、电池箱暂存座7和换电机器人9。仓壳1可拆卸地连接于所述底箱架8,所述仓壳1具有空腔。电池箱暂存座7设置于所述空腔内。所述换电机器人9可活动地设置于所述仓壳1内,所述换电机器人9能抓取电池箱并暂存于所述电池箱暂存座7。
91.换电设备包括换电仓100和充电仓。充电仓内设置多个电池箱固定座,用于固定电池箱并且能给电池箱充电。本技术实施例中,通过在换电仓100的仓壳1内设置电池箱暂存座7,可以暂存由待换电车辆上拆卸的亏电的电池箱,不需要在换电设备的充电仓内预留空位,使得充电仓能够保持满载电池箱的状态,充分利用了换电仓100的空间,提升了充电仓的电池箱装载量。
92.在一种可能的实施方案中,参见图2和图6所示,换电仓100包括两个电池箱暂存座7,所述仓壳1具有侧壁11和顶壁13,所述侧壁11沿所述底箱架8的边沿延伸设置,所述顶壁13连接于所述侧壁11,所述侧壁11上设置有门洞12,两个所述电池箱暂存座7均位于所述空腔内,且两个所述电池箱暂存座7分设于所述门洞12的两侧。
93.换电仓100和充电仓200相平行设置,换电仓100背离充电仓的一侧设置门洞12,换电仓100朝向充电仓的一侧为敞口侧,敞口侧和充电仓相连通。换电机器人9具有抓取电池箱的抓取机构,抓取机构包括多级伸缩臂架91和抓具92,抓具92连接于多级伸缩臂架91的末端,多级伸缩臂架91能沿换电仓100的宽度方向伸缩运动。在换电过程中,换电机器人9的多级伸缩臂架91能伸出门洞12使得抓具92接触并抓取待换电车上的亏电的电池箱。然后换电机器人9控制多级伸缩臂架91带动电池箱由门洞12回缩至空腔内以存放于电池箱暂存座7。随后换电机器人9沿着换电仓的长度方向平移行进至目标位置,并控制多级伸缩臂架91向充电仓一侧伸出,以通过抓具抓取充电仓内的目标电池箱,然后多级伸缩臂架91带动满电的电池箱回缩至空腔内,换电机器人行进至两个电池箱暂存座7之间的位置,即正对门洞12的位置,也可以称为供电工位,换电机器人在该位置处控制多级伸缩臂架91携带满电的电池箱伸出门洞以将电池箱装入待换电车上,最后,换电机器人再抓取存放于电池箱暂存座上的亏电的电池箱并装入充电仓内的电池箱固定座对电池箱进行充电。
94.通过在换电工位两侧分别设置电池箱暂存座,换电机器人可根据需要抓取的目标满电电池箱的位置将抓取的待换电车上的电池箱放置于相应的电池箱暂存座上。例如,当换电机器人需要抓取位于换电工位左侧的满电电池箱时,可以先抓取待换电车上的亏电的电池箱并装入换电工位右侧的电池箱暂存座上,不阻挡换电机器人后续行走轨迹。方便换电机器人顺利完成换电任务。
95.在一种可能的实施方案中,所述仓壳1具有底壁15,所述侧壁11连接于所述底壁15,所述电池箱暂存座7固定于所述底壁15上。
96.侧壁11上设置有门体2,所述门体2可滑动地连接于所述侧壁11,以打开或闭合所述门洞12。
97.所述底壁15具有多个第一方向底梁,第一方向梁可以沿着换电仓的长度方向延伸设置。相邻的第一方向梁之间连接有第二方向梁,第二方向梁垂直于第一方向梁。所述电池箱暂存座7垂直所述第一方向梁设置,所述电池箱暂存座7支撑于所述第一方向梁上,且所述电池箱暂存座7通过紧固件固定于所述第二方向梁上。底壁15上位于第一方向梁和第二方向梁上覆盖有面板层,紧固件穿过面板层连接于所述第二方向梁上。
98.参见图3所示,换电仓100还包括两个导轨16,两个所述导轨16间隔地设置于所述底壁15上,所述电池箱暂存座7位于两个所述导轨16之间,所述换电机器人9可滑动地连接于两个所述导轨16上。池箱暂存座7不干涉换电机器人的运行。
99.可选的,所述侧壁11包括第一侧壁和两个第二侧壁,两个第二侧壁位于换电仓沿长度方向的两端。所述第一侧壁连接两个所述第二侧壁,所述顶壁13分别连接所述第一侧壁和两个所述第二侧壁,所述仓壳1与所述第一侧壁相对的一侧为敞口侧。所述换电机器人9具有抓取机构,所述抓取机构能沿垂直所述第一侧壁的方向双向伸缩,以伸出或缩回所述敞口侧/所述门洞12。
100.换电仓100还包括盖体14,所述顶壁13上设置有吊装避让孔132,所述盖体14可拆卸地连接于所述顶壁13,以封闭或打开所述吊装避让孔132。
101.本技术换电仓100的顶壁13上设置吊装避让孔132,方便了换电机器人9的装配,换电机器上连接吊绳,吊绳穿过吊装避让孔132连接于起吊设备上,操作人员借助平移机构将换电机器人9的一个长度边一侧先伸入空腔内位于吊装避让孔132的下方,吊装设备吊起换电机器人9,旋转九十度,使得换电机器人9正位(换电机器人9处于正位状态时,换电机器人9的长度边和换电仓100的长度方向相垂直),进而吊装设备下放换电机器人9完成换电机器人9的装配。盖体14可以在装配完换电机器人9后封闭吊装避让孔132,防止雨水渗入换电仓100内部。
102.在一种可能的实施方案中,所述盖体14中部开设有透光槽,所述盖体14上连接有透光板,所述透光板覆盖所述透光槽。通过透光板的设计,阳光可以透过透光板照射于换电仓100内,使得换电仓100内光线更好。
103.可选的,所述底箱架8上设置有导向部件(未图示)。在所述仓壳1装入所述底箱架8的过程中,所述仓壳1能沿所述导向部件滑动至支撑于所述底箱架8。可选的,所述导向部件具有上凸的弧形导向面,所述仓壳1底部设置有导向配合孔(未图示)。在所述仓壳1装入所述底箱架8的过程中,所述导向部件能插入于所述导向配合孔内。
104.该实施方案中,通过设置导向部件,方便了仓壳1准确装配到位。仓壳1上可以设置吊装环,通过吊装设备起吊装并下放。
105.换电机器人9的抓取机构还包括升降机构,升降机构设置于多级伸缩臂架91的末端,且抓具92连接于升降机构,升降机构带动抓具92升降运动,抓具92能够抓取或释放电池箱。在需要抓取电池箱时,多级伸缩臂架91伸缩运动使得抓具92位于电池箱的正上方,然后升降机构下放抓具92使得抓具92接触并抓取电池箱。随后,升降机构提升抓具92吊起电池箱。在需要将电池箱转运至电池箱固定座或电池箱暂存座7时,多级伸缩臂架91先带动电池箱回缩,然后整个换电机器人9沿着导轨移动至目标位置,多级伸缩臂架91再次伸长使得抓具92位于相应电池箱暂存座7或电池箱固定座的正上方,然后升降机构下放抓具92,将电池箱装入电池箱暂存座7或电池箱固定座,抓具92释放电池箱。
106.需要注意的是,换电机器人已申请专利且已公开,本技术对其具体结构不再赘述,且各种形式的换电机器人均可以适用于本技术,本技术对换电机器人的具体结构不做限定
107.在一种可能的实施方案中,参见图4所示,电池箱暂存座7具有水平框架71和凸出设置于所述水平框架71的导向组件。电池箱能沿所述导向组件滑动至支撑于所述水平框架71上。
108.换电机器人9上还设置升降机构,抓具92连接于升降机构,升降机构能够带动抓具92升降运动。在需要将电池箱装入电池箱暂存座7时,首先多级伸缩臂架91处于回缩状态,升降机构(可以包括吊绳)逐渐下放抓具92电池箱接触导向组件并沿导向体72逐渐下落直至稳定地支撑于电池箱暂存座7。
109.在一种可能的实施方案中,所述导向组件包括多个导向体72,各所述导向体72分布于框架体的不同位置上,各所述导向体72均具有倾斜的导向面。在电池箱底部周壁能沿着导向面下滑直至稳定支撑于电池箱暂存座7的水平框架71,导向体72除了起到导向作用外还起到限位作用,防止电池箱移位或倾斜。
110.实施例三
111.参见图7至图11所示,本技术实施例继续对换电仓100的结构进行详细说明,换电仓100包括:侧壁、顶壁13和盖体14。顶壁13连接于所述侧壁,所述顶壁13和所述侧壁围合形成空腔,所述顶壁13上设置有连通所述空腔的吊装避让孔132。盖体14可拆卸地连接于所述顶壁13,以封闭或打开所述吊装避让孔132。
112.本技术换电仓100的顶壁13上设置吊装避让孔132,方便了换电机器人的装配,换电机器上连接吊绳,吊绳穿过吊装避让孔132连接于起吊设备上,操作人员借助平移机构将换电机器人的一个长度边一侧先伸入空腔内位于吊装避让口的下方,吊装设备吊起换电机器人,旋转九十度,使得换电机器人正位(换电机器人处于正位状态时,换电机器人的长度边和换电仓100的长度方向相垂直),进而吊装设备下放换电机器人完成换电机器人的装配。盖体14可以在装配完换电机器人后封闭吊装避让孔132,防止雨水渗入换电仓100内部。
113.在一种可能的实施方案中,所述顶壁13具有顶部框架和盖板组件,所述盖板组件覆盖于所述顶部框架,所述盖板组件之间形成所述吊装避让孔132。
114.盖板组件可以中部开设孔洞形成该吊装避让孔132。或者,所述盖板组件包括第一侧盖板133和第二侧盖板134。所述第一侧盖板133和所述第二侧盖板134均覆盖于所述顶部框架上。所述第一侧盖板133和所述第二侧盖板134之间形成所述吊装避让孔132。第一侧盖板133和第二侧盖板134可以均为一体板。或者,第一侧盖板133和第二侧盖板134可以均为多个板体拼接形成。
115.在一种可能的实施方案中,参见图8、图10和图11所示,所述顶壁13具有盖体配合框架135,所述盖体配合框架135沿所述吊装避让孔132边沿设置,所述盖体14可拆卸地连接于所述盖体配合框架135上。盖体配合框架135的设计,方便了盖体14的拆装。
116.在一种可能的实施方案中,参见图9和图11所示,所述顶壁13具有顶部框架,所述顶部框架包括间隔设置的两个主梁131a。所述盖体配合框架135具有两个第一配合梁1351和两个第二配合梁1352。两个所述第一配合梁1351垂直连接于两个所述主梁131a,两个所述第二配合梁1352分别设置于两个所述主梁131a上,且两个所述第二配合梁1352的两端分别连接于两个所述第一配合梁1351。所述盖体14分别支撑于所述第一配合梁1351和所述第
二配合梁1352上。该实施方案中,盖板配合框架的两个第一配合梁1351和两个第二配合梁1352之间围合形成口字形洞口。两个方向的配合梁提供了盖体稳定支撑配合的位置。
117.在一种可能的实施方案中,顶部框架包括多个横梁131b,各所述横梁131b分别连接两个所述主梁131a。所述第一配合梁1351和一所述横梁131b贴合连接。
118.该实施方案中,第一配合梁1351可以和横梁131b直接连接固定,提高了第一配合梁1351的结构强度,第一配合梁1351可以采用焊接固定于横梁131b上。第一配合梁1351也可以通过紧固件固定于横梁131b上。
119.在一种可能的实施方案中,所述盖体配合框架135具有上延伸板135a。例如第一配合梁1351和第二配合梁1352上均设置上延伸板135a。所述盖体14的一周边沿设置有下延伸板(未图示)。在所述盖体14安装于所述盖体配合框架135的状态下,所述下延伸板和所述上延伸板135a相贴合。
120.该实施方案中,在盖体14安装于所述盖体配合框架135的状态下,下延伸板可以套设在上延伸板135a的外侧,上延伸部和下延伸板内外贴合的配合方式限定了盖体14的位置,防止盖体14移位。
121.在一种可能的实施方案中,所述盖体配合框架135上设置有连接座1353。所述盖体14边沿设置有连接耳141。所述连接耳141支撑于连接座1353上,连接耳141和所述连接座1353可拆卸地连接。
122.例如,所述连接座1353上设置固定孔,所述连接耳141上设置贯通槽,紧固件一端穿过所述贯通槽连接于所述固定孔。
123.所述贯通槽可以为长条形,解决了制造误差导致的贯通槽和固定孔错位的问题。
124.在一种可能的实施方案中,所述盖体14中部开设有透光槽,所述盖体14上连接有透光板142,所述透光板142覆盖所述透光槽。通过透光板142的设计,阳光可以透过透光板142照射于换电仓100内,使得换电仓100内光线更好。
125.在一种可能的实施方案中,参见图10所示,所述盖体14上设置有起吊配合部143,方便通过吊装设备起到该盖体14。起到配合部可以包括设置于盖体14上的多个把手。
126.在一种可能的实施方案中,参见图7所示,所述侧壁包括第一侧壁111和两个第二侧壁112,两个所述第二侧壁112间隔设置,所述第一侧壁111连接两个所述第二侧壁112,所述顶壁13分别连接所述第一侧壁111和两个第二侧壁112,所述第一侧壁111和所述第二侧壁112围合形成所述空腔,所述换电仓100上与所述第一侧壁111相对的一侧为敞口侧。敞口侧用于连通充电仓,充电仓内用于装载电池箱和为电池箱充电的充电机。第一侧壁111上设置门洞。换电机器人的伸缩臂能够伸出敞口侧抓取换电仓100内的电池箱,并能回缩后进一步伸出门洞将电池箱装入待换电车上。换电机器人能将待换电车上的电池箱转运至充电仓内进行充电,并将充电仓内的满电的电池箱转运至待换电车。换电机器人具有伸缩臂和设置于伸缩臂端部的抓具,伸缩臂能带动抓具伸缩运动,抓取或释放电池箱。换电机器人已申请专利,本技术对其具体结构不再赘述,且各种形式的换电机器人均可以适用于本技术,本技术对换电机器人的具体结构不做限定。
127.实施例四
128.参见图12至图18所示,本技术实施例对换电设备的换电仓进行进一步详细说明,该换电仓包括:仓壳1、门体2和换电机器人(未图示)。所述仓壳1围合形成空腔,所述仓壳1
具有侧壁11,所述侧壁11上开设连通所述空腔的门洞12。门体2连接于所述侧壁11,所述门体2用于打开或闭合所述门洞12。换电机器人可活动地设置于所述仓壳1内。本技术提供的换电仓设置有仓壳1可保护内部换电机器人,防止换电机器人暴露在环境中,且能保护被换电机器人抓取的电池箱。仓壳1上设置门洞12方便换电机器人的多级伸缩臂伸出仓壳1抓取或卸载电池箱。其中,换电仓背离门洞的一侧为敞口侧,连通充电仓,充电仓用于存储电池箱,且充电仓内设置充电机用于为电池箱充电。换电机器人将待换电车上的电池箱转运至充电仓内进行充电,并将充电仓内的满电的电池箱转运至待换电车。换电机器人具有多级伸缩臂和设置于伸缩臂端部的抓具,多级伸缩臂能带动抓具伸缩运动,抓取或释放电池箱。换电机器人已申请专利,本技术对其具体结构不再赘述,且各种形式的换电机器人均可以适用于本技术,本技术对换电机器人的具体结构不做限定。
129.在一种可能的实施方案中,参见图13所示,所述仓壳1上设置有滑轨3,所述门体2可滑动地连接于所述滑轨3,所述门体2能沿所述滑轨3滑动打开或闭合所述门洞12。
130.滑轨3可以沿侧壁的长度方向延伸,滑轨3部分位于门洞顶部或底部,部分延伸至侧壁的其他位置,门体沿滑轨3滑动实现打开或闭合门洞。门体2可以为单开门或双开门结构。
131.在一种可能的实施方案中,所述仓壳1上位于所述门洞12的上下两侧分别设置有滑轨3,所述门体2的上下两侧分别可滑动地连接于两个所述滑轨3。
132.该实施方案中,通过在仓壳1的上下部位均设置滑轨3,提高对门体2的支撑稳定性。方便门体2顺利的打开或闭合门洞12。
133.在一种可能的实施方案中,门体2上设置有滚轮组件21,所述滑轨3具有轨道槽,所述滚轮组件21容纳于所述轨道槽内。
134.该实施方案中,门体2上的滚轮组件21可滑动地支撑于轨道槽内,轨道槽限定各滚轮组件21的位置,滚轮组件21不会脱离滑轨3。滚轮组件21的设计,减少了门体2的滑动阻力。
135.在一种可能的实施方案中,所述滚轮组件21具有支架211、第一滚轮212和第二滚轮213。所述支架211连接于所述门体2,所述第一滚轮212和所述第二滚轮213均连接于所述支架211,所述第一滚轮212和所述第二滚轮213的旋转轴线相垂直。所述第一滚轮212的滚动面接触于所述轨道槽的底壁,所述第二滚轮213的滚动面接触于所述轨道槽的侧壁11。
136.该实施方案中,第一滚轮212和第二滚轮213的旋转轴线相垂直,第一滚轮212支撑于轨道槽的底壁,第二滚轮213支撑于轨道的侧壁11,从而在两个方向对门体2进行限位,门体2装配结构稳定好,门体2不易晃动,在开闭过程中,门体2滑动产生的噪音小。
137.在一种可能的实施方案中,所述滑轨3和所述门体2均设置于所述空腔的内侧,使得仓壳1外部结构平整,外界的杂物不容易进入滑轨3的轨道槽内。门体2和滑轨3能够保持良好的滑动配合关系。
138.在一种可能的实施方案中,参见图14所示,换电仓还包括驱动机构4,所述驱动机构4和所述门体2传动连接,驱动所述门体2打开或闭合所述门洞12。
139.该实施方案中,驱动机构4能自动驱动打开或闭合门体2,自动化程度高。
140.在一种可能的实施方案中,门体2沿滑动方向的一侧边沿设置有铰接座22,所述驱动机构4具有伸缩端,所述伸缩端铰接于所述铰接座22。
141.驱动部件可以包括伸缩油缸,伸缩油缸的端部和门体2端部的铰接座22相铰接,伸缩油缸伸缩运动,电动所述门体2沿所述滑轨3移动。当然的,驱动部件也可以采用其他驱动机构。
142.在一种可能的实施方案中,所述驱动机构4连接于所述侧壁11上,方便直接与门体2连接,简化了连接结构。
143.在一种可能的实施方案中,所述侧壁11具有加强纵筋和覆盖于所述加强纵筋上的蒙皮。所述驱动机构4还包括固定梁41,所述固定梁41垂直连接于若干所述加强纵筋设置。固定梁41和多个加强纵筋连接固定,提高了装配结构稳定性。固定梁41和加强纵筋可以焊接固定也可以采用紧固件固定,如通过螺钉连接固定。
144.在一种可能的实施方案中,伸缩机构包括固定部42和伸缩部43,所述固定部42连接于所述固定梁41上,所述伸缩部43连接于所述门体2。伸缩机构可以包括伸缩油缸,固定部42可以为伸缩油缸的缸筒,伸缩部43可以为连接于缸筒的伸缩杆,缸筒可以平行固定于固定梁41上,伸缩部的端部连接于门体2上的铰接座22。
145.在一种可能的实施方案中,参见图16至图18所示,所述仓壳1上设置有闭合到位传感器5和开门到位传感器6,闭合到位传感器5和开门到位传感器6可以分设于门洞的两侧。所述门体2上设置有第一触发部23和第二触发部24。所述门体2具有闭合所述门洞12的闭门位置和打开所述门洞12的开门位置。在所述门体2滑动至所述闭门位置的状态下,所述第一触发部23触发所述闭合到位传感器5。在所述门体2滑动至打开所述开门位置的状态下,所述第二触发部24触发所述开门到位传感器6。该实施方案中,通过设置两个触发部和两个到位传感器可实现自动控制开闭门体2。控制模块分别和驱动机构4、闭合到位传感器5和开门到位传感器6电连接,在接收开门指令时,控制模块控制驱动机构4的伸缩油缸回缩,带动门体2移动直至第二触发部24触发开门到位传感器6时,控制模块控制驱动机构4停止运动。在接收到闭门指令时,控制模块控制驱动机构4的伸缩油缸伸长,带动门体2移动直至第一触发部23触发闭合到位传感器时,控制模块控制驱动机构4停止运动。其中,闭合到位传感器5和开门到位传感器6可以为接近开关或光电开关。当闭合到位传感器5和开门到位传感器6为接近开关时,触发部靠近接近开关时,即可触发接近开关,此时控制模块判断判断门体2准确运行至闭门位置或开门位置。当两个到位传感器均为光电开关时,到位传感器可以包括发射部和接收部,发射部发射信号,接收部接收发射部发射的信号,当触发部进行至接收部和发射部之间时,阻挡了接收部接收信号,此时控制模块判断门体2准确运行至闭门位置或开门位置。
146.实施例五
147.参见图19至图24所示,本技术实施例五对换电设备的充电仓200进行详细的说明,充电仓200包括:充电底箱210、上箱壳230和多个充电机220。充电底箱210具有多个升降支腿2110,升降支腿2110用于调平充电底箱210。所述充电底箱210的顶部设置有多个电池箱固定座2120。各所述充电机220均设置于所述充电底箱210内部,且所述充电机220电连接于所述电池箱固定座2120,为安装于电池箱固定座2120上的电池箱充电。例如,电池箱固定座2120具有为电池箱充电的充电端子,充电机直接电连接该充电端子。电池箱底部设置接电端子,在电池箱安装于电池箱固定座上时,充电端子和接电端子直接电连接实现充电。上箱壳230可拆卸地连接于所述充电底箱210,所述上箱壳230覆盖各所述电池箱固定座2120。
148.本技术充电仓200不仅能够暂存待换电车上拆卸下的亏电电池箱,还能对拆卸下的亏电电池箱进行充电,不需要转运至其他站点进充电,降低了运输成本。上箱壳230能够覆盖各电池箱固定座2120,对电池箱和充电机220具有保护的作用。
149.在一种可能的实施方案中,参见图21和图22所示,所述上箱壳230和所述充电底箱210围合形成电池存放腔。所述上箱壳230一侧设置连通所述电池存放腔的换电避让口233。所述上箱壳230具有顶壁231,所述顶壁231倾斜设置,所述顶壁231位于所述换电避让口233的一侧位置高,所述顶壁231远离所述换电避让口233的一侧位置低。
150.该实施方案中,通过将顶壁231倾斜设置,利于排水,防止雨水渗入充电仓200内部。换电设备还具有换电仓,换电仓内设置换电机器人,换电避让口233连通该换电仓。本技术中,顶壁231位于换电避让口233的一侧位置高,雨水不会向充电仓200和换电仓之间的缝隙流动,避免大量雨水进入换电设备内部浇灌到正在执行任务的换电机器人,提高了安全性。
151.在一种可能的实施方案中,参见图22所示,所述顶壁231上设置集水槽2312a,所述集水槽2312a位于所述顶壁231远离所述换电避让口233的一侧。
152.在雨雪天气中,雨水会沿着顶壁231流入集水槽2312a,利于雨水的顺利排放。
153.在一种可能的实施方案中,参见图21和图22所示,所述上箱壳230具有侧壁,所述顶壁231包括主板体2311和集水板2312,所述主板体2311连接于所述侧壁,所述主板体2311和所述侧壁之间形成所述换电避让口233。所述集水板2312连接于侧板上,且所述集水本位于所述主板体2311背离所述换电避让口233的一侧,所述集水板2312具有所述集水槽2312a。所述主板体2311由所述换电避让口233一侧向所述集水板2312一侧倾斜。
154.在一种可能的实施方案中,充电仓200还包括排水管240,所述排水管240连通于所述集水槽2312a。集水槽2312a内的积液能够通过排水管240排出。
155.在一种可能的实施方案中,所述上箱壳230上位于集水槽2312a的两端分别设置有转接盒250,所述转接盒250连通所述集水槽2312a,所述排水管240连通于所述转接盒250。
156.该实施方案中,转接盒250具有缓冲汇流的作用。转接盒250的设计方便了排水管240连通集水槽,方便了排水管240连接装配。
157.在一种可能的实施方案中,参见图22所示,所述上箱壳230上设置多个固定所述排水管240的固定件260,各所述固定件260沿所述排水管240的长度方向依次间隔设置。紧固件的两端固定于上箱壳230上,中部则压紧于排水管240。
158.在一种可能的实施方案中,参见图19和图20所示,所述充电底箱210上设置有导向部件2130,在所述上箱壳230装入所述充电底箱210的过程中,所述上箱壳230沿所述导向部件2130滑动至支撑于所述充电底箱210。
159.该实施方案中,通过设置导向部件2130,方便了上箱体准确装配到位。上箱体上可以设置吊装环,通过吊装设备起到并下放。
160.在一种可能的实施方案中,所述导向部件2130具有上凸的弧形导向面,所述上箱壳230底部设置有导向配合孔232,在所述上箱壳230安装于所述充电底箱210的过程中,所述导向部件2130能插入于所述导向配合孔232内。
161.在一种可能的实施方案中,所述充电底箱210具有上壁面,所述升降支腿2110具有支撑壳,所述支撑壳具有平直顶壁,所述平直顶壁高于所述上壁面。在所述上箱壳230安装
于充电底箱210的状态下,所述上箱壳230支撑于所述平直顶壁,所述上箱壳230和所述上壁面具有间隙。上箱壳230底部表面和上壁面的顶部表面之间具有间隔,避免了制造误差影响到装配。
162.在一种可能的实施方案中,参见图23和图24所示,充电仓200还包括排风管道215,所述充电底箱210具有空腔,所述排风管道215设置于所述空腔内,各所述充电机220均设置于所述空腔内,各所述充电机220分别连通所述排风管道215。
163.充电机220产生的热量进入排风管道215最终被排出充电底箱210,确保充电底箱210低温运行,使得充电机220能够保持良好的工况。
164.在一种可能的实施方案中,各所述充电机220分设于所述排风管道215的两侧,且各所述充电机220沿所述排风管道215的长度方向依次设置。各充电机220分设于排风管道215的两侧,且整齐排列,充分利用了内部空间。
165.充电底箱210顶部沿长度方向排列有多个电池箱固定座,充电底箱210内部的各充电机分别通过供电线缆电连接于各所述电池箱固定座上。
166.在一种可能的实施方案中,参见图24所示,所述排风管道215底部连接有支架216,支架216架起所述排风管道215,所述排风管道215具有底壁,所述底壁上设置多个连通口,各所述充电机220均连通于所述底壁上相应的连通口。
167.该实施方案中,通过设置支架216使得排放管道悬空,方便充电机220通过管道连通于底壁上的连通口,所有充电机220和排风管道215占据的换电设备的宽度方向的尺寸小,有利于减小充电底箱210的宽度。
168.在一种可能的实施方案中,充电仓200包括两个所述排风管道215,两个所述排风管道215沿所述充电底箱210的长度方向依次设置,每一所述排风管道215上均设置出风口和风机。通过设置两个排风管道215,缩短了每一排放管道的延伸长度,利于在同样的风机的驱动下,气流流动更快。
169.在一种可能的实施方案中,所述充电底箱210对应每一所述排风管道215设置有栅格窗214,每一所述排风管道215均延伸至相应的栅格窗214,且端部设置所述出风口。
170.该实施方案中,栅格窗214的设计,利于排放管道末端的出风口将热空气直接通过栅格窗214排放至外界。
171.实施例六
172.本技术实施例二提供上述换电设备的换电方法,包括:
173.步骤s1、换电机器人行进至换电工位,并抓取待换电车上的亏电电池箱;
174.步骤s2、换电机器人沿设定轨迹行进至所述电池箱暂存座,并将亏电电池箱装入所述电池箱暂存座;
175.步骤s3、换电机器人沿设定轨迹移动至目标满电电池箱对应的位置,并抓取目标满电电池箱;
176.步骤s4、换电机器人运行至所述换电工位将目标满电电池箱装入所述待换电车。
177.可选的,换电设备的换电方法包括两个电池箱暂存座,两个所述电池箱暂存座之间具有换电工位;
178.在步骤s2中,换电机器人将亏电电池箱转移至一所述电池箱暂存座;
179.在步骤s3中,换电机器人向另一所述电池箱暂存座所在的一侧移动,直至行进至
目标满电电池箱。
180.可选的,抓取机构包括多级伸缩臂架和抓具,所述抓具连接于所述多级伸缩臂架的端部;
181.在步骤s1中,抓取机构能向第一方向伸出,抓取待换电车上的亏电电池箱;
182.在步骤s2中,抓取机构能回缩将亏电电池箱转移至电池箱暂存座;
183.在步骤s3中,抓取机构能向第二方向伸出,抓取目标满电电池箱;
184.其中,第一方向和第二方向为垂直于设定轨迹的两个相反的方向。
185.在步骤s4之后还包括步骤s5:换电机器人运行至存放亏电的电池箱的电池箱暂存座,并抓取亏电的电池箱装入充电仓内相应的电池箱固定座上。
186.换电机器人已申请专利,本技术对其具体结构不再赘述,且各种形式的换电机器人均可以适用于本技术,本技术对换电机器人的具体结构不做限定。
187.换电机器人的抓取机构还包括升降机构,升降机构设置于多级伸缩臂架的末端,且抓具连接于升降机构,升降机构带动抓具升降运动,抓具能够抓取或释放电池箱。电池箱固定座需要为电池箱充电且需要长时间固定电池箱,因此具有锁定机构和充电连接器结构,结构较为复杂,而电池箱暂存座仅需要暂存电池箱,不需要设置锁定机构和电连接器,结构简单很多,有利于降低换电设备的成本。
188.在需要抓取电池箱时,多级伸缩臂架伸缩运动使得抓具位于电池箱的正上方,然后升降机构下放抓具使得抓具接触并抓取电池箱。随后,升降机构提升抓具吊起电池箱。在需要将电池箱转运至电池箱固定座或电池箱暂存座时,多级伸缩臂架先带动电池箱回缩,然后整个换电机器人沿着设定轨迹移动至目标位置,多级伸缩臂架再次伸长使得抓具位于相应电池箱暂存座或电池箱固定座的正上方,然后升降机构下放抓具,将电池箱装入电池箱暂存座或电池箱固定座,抓具释放电池箱。
189.以上所述仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专利的技术人员在不脱离本发明技术方案范围内,当可利用上述提示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明方案的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。