1.本发明涉及车辆换电技术领域,特别涉及一种充换电站的换电方法、系统、设备及存储介质。
背景技术:
2.为响应全球节能减排号召,近年来,以燃油为动力源的机械设备逐渐被电动机械设备取代。市场上提供了为电动设备直接换电的换电站,换电站内存储有多个满电电池箱,亏电的车辆可以行驶至该换电站将亏电的电池箱卸载于换电站的电池仓内,而将电池仓内满电的电池箱装入车辆。
3.换电站由上下两个箱体组成,上箱体为换电仓,内含换电机器人以及机器人所需的动力部分及检测部分,下箱体为充电仓,具有充电机组,散热装置等组成,布局非常紧凑,占地面积很小,在其紧凑的布局下完成的换电系统具有天然的特征,如图3所示,即每从3号位顺序换完一轮电池包后,必须要将1号位和2号位的电池转移到9号位和10号位的电池座上,以便进行下一次换电,该过程不仅电池利用率低,而且耗时,对于重量较大的电池,其能耗也是相当大的。尤其是当需要换电机械设备较多时,会增加等待时间,导致换电效率降低,不能满足客户需求。
技术实现要素:
4.本发明实施例提供的方案解决的技术问题是换电站充电仓内的电池座不能够保持满载电池包,换电效率低,电池利用率低。
5.根据本发明实施例提供的一种充换电站的换电方法,包括:
6.所述充换电站根据换电车辆发送的换电请求,确定满电电池包的充电位;
7.所述充换电站根据所述满电电池包的充电位,生成换电指令,并将所述换电指令发送给换电机器人;
8.所述换电机器人根据所述换电指令通过通道位将所述换电车辆上的亏电电池包抓取到暂存位,以及通过通道位将所述充电位上的满电电池包抓取到所述换电车辆。
9.根据本发明实施例提供的一种充换电站的换电系统,包括:
10.充换电站,用于根据换电车辆发送的换电请求,确定满电电池包的充电位,并根据所述满电电池包的充电位,生成换电指令,并将所述换电指令发送给换电机器人;
11.换电机器人,用于根据所述换电指令通过通道位将所述换电车辆上的亏电电池包抓取到暂存位,以及通过通道位将所述充电位上的满电电池包抓取到所述换电车辆。
12.根据本发明实施例提供的方案,使得充电仓内的充电座能够保持满载电池箱,充分利用了换电仓的空间,且提升了充电仓的电池箱装载量,提高了换电效率。
附图说明
13.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发
明的示意性实施例及其说明用于理解本发明,并不构成对本发明的不当限定。在附图中:
14.图1是本发明实施例提供的一种充换电站的换电方法的流程图;
15.图2是本发明实施例提供的一种充换电站的换电系统的示意图;
16.图3是现有技术提供的倒仓示意图;
17.图4是本发明实施例提供的充换电站的示意图。
具体实施方式
18.以下结合附图对本发明的优选实施例进行详细说明,应当理解,以下所说明的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
19.图1是本发明实施例提供的一种充换电站的换电方法的流程图,如图1所示,包括:
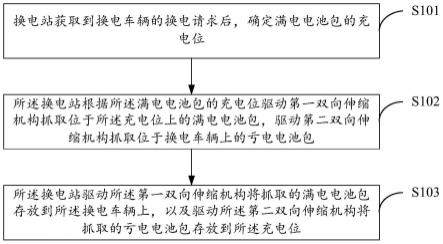
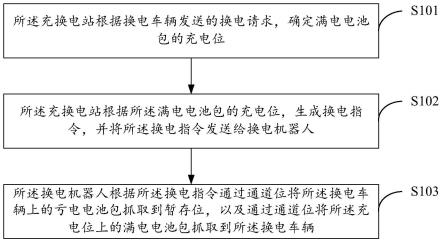
20.步骤s101:所述充换电站根据换电车辆发送的换电请求,确定满电电池包的充电位;
21.步骤s102:所述充换电站根据所述满电电池包的充电位,生成换电指令,并将所述换电指令发送给换电机器人;
22.步骤s103:所述换电机器人根据所述换电指令通过通道位将所述换电车辆上的亏电电池包抓取到暂存位,以及通过通道位将所述充电位上的满电电池包抓取到所述换电车辆。
23.其中,所述充换电站包括具有双向伸缩机构的换电机器人、充换电仓,以及位于所述充换电仓两侧的车辆通道仓和电池包倒仓通道仓;所述充换电仓中的所述暂存位和所述通道位的设置方式为间隔设置或非间隔设置。
24.在所述充换电站根据所述满电电池包的充电位,生成换电指令之前,还包括:所述充换电站检测所述换电车辆的亏电电池包是否与所述充换电仓中的通道位对齐;当检测所述换电车辆的亏电电池包未与所述充换电仓中的通道位对齐时,所述充换电站发出告警提示。
25.其中,所述换电机器人经由所述通道位和所述电池包倒仓通道仓将位于车辆通道仓内的亏电电池包抓取到所述暂存位,并经由所述电池包倒仓通道仓和所述通道位将所述充电位上的满电电池包抓取到所述换电车辆。
26.本发明实施例还包括:所述换电机器人通过所述车辆通道仓或所述电池包倒仓通道仓将所述暂存位的亏电电池包抓取到所述充电位,以便对所述亏电电池包进行充电。
27.如图4所示,所述通道位和所述暂存位设置在所述充换电仓的最中间位置,使所述通道位的两侧有相同或相近数量的充电位。通道位和暂存位也可以设置在充换电仓的其他充电位,且可以分开设置。
28.需要指出的是,本技术实施例在所述换电机器人根据所述换电指令通过通道位将所述换电车辆上的亏电电池包抓取到暂存位之前,还包括:设置在换电机器人上的三个激光测距传感器分别检测其与换电车辆上亏电电池包的间距,并将每个激光测距传感器检测的间距信息发送给换电站;所述换电站根据所述每个激光测距传感器的间距信息,判断所述换电机器人是否与所述亏电电池包完全对齐;当判断所述换电机器人未与所述亏电电池包完全对齐时,所述换电站调整所述换电机器人的位置,使所述换电机器人与所述亏电电池包完全对齐,以便所述换电机器人完成所述换电车辆的换电操作。
29.其中,所述三个激光测距传感器包括左侧激光测距传感器、中间激光测距传感器以及右侧激光测距传感器;其中,所述间距信息包括左侧激光测距传感器检测的左侧间距信息、中间激光测距传感器检测的中间间距信息以及右侧激光测距传感器检测的右侧间距信息。
30.其中,所述换电站根据所述每个激光测距传感器的检测间距信息,判断所述换电机器人是否与所述亏电电池包完全对齐包括:当所述左侧间距信息、中间间距信息以及右侧间距信息均在预置的间距范围内时,所述换电站判断所述换电机器人与所述亏电电池包完全对齐;当所述左侧间距信息或所述右侧间距信息不在预置的间距范围内时,所述换电站判断所述换电机器人未与所述亏电电池包完全对齐。
31.具体地说,当判断所述换电机器人未与所述亏电电池包完全对齐时,所述换电站调整所述换电机器人的位置,使所述换电机器人与所述亏电电池包完全对齐包括:当所述左侧间距信息不在预置的间距范围内时,所述换电站向所述换电机器人发送向右移动指令,使所述换电机器人根据所述向右移动指令沿轨道向右调整位置,使所述换电机器人与所述亏电电池包完全对齐;当所述右侧间距信息不在预置的间距范围内时,所述换电站向所述换电机器人发送向左移动指令,使所述换电机器人根据所述向左移动指令沿轨道向左调整位置,使所述换电机器人与所述亏电电池包完全对齐。
32.具体地说,所述换电站根据所述每个激光测距传感器的检测间距信息,判断所述换电机器人是否与所述亏电电池包完全对齐包括:当所述左侧间距信息和所述右侧间距信息均大于预置的间距范围,且所述中间间距信息在预置的间距范围内时,所述换电站判断所述换电机器人与所述亏电电池包完全对齐;当所述左侧间距信息或所述右侧间距信息在预置的间距范围内时,所述换电站判断所述换电机器人未与所述亏电电池包完全对齐。
33.具体地说,当判断所述换电机器人未与所述亏电电池包完全对齐时,所述换电站调整所述换电机器人的位置,使所述换电机器人与所述亏电电池包完全对齐包括:当所述左侧间距信息在预置的间距范围内时,所述换电站向所述换电机器人发送向左移动指令,使所述换电机器人根据所述向左移动指令沿轨道向左调整位置使所述换电机器人与所述亏电电池包完全对齐;当所述右侧间距信息在预置的间距范围内时,所述换电站向所述换电机器人发送向右移动指令,使所述换电机器人根据所述向右移动指令沿轨道向右调整位置,使所述换电机器人与所述亏电电池包完全对齐。
34.图2是本发明实施例提供的一种充换电站的换电系统的示意图,如图2所示,包括:充换电站201,用于根据换电车辆发送的换电请求,确定满电电池包的充电位,并根据所述满电电池包的充电位,生成换电指令,并将所述换电指令发送给换电机器人;换电机器人202,用于根据所述换电指令通过通道位将所述换电车辆上的亏电电池包抓取到暂存位,以及通过通道位将所述充电位上的满电电池包抓取到所述换电车辆。
35.具体地说,所述充换电站201包括具有双向伸缩机构的换电机器人、充换电仓,以及位于所述充换电仓两侧的车辆通道仓和电池包倒仓通道仓;所述充换电仓中的所述暂存位和所述通道位的设置方式为间隔设置或非间隔设置;在所述充换电仓的最中间位置设置所述通道位,使所述通道位的两侧有相同或相近数量的充电位。
36.本技术实施例提供的一种电子设备,包括:存储器;处理器;以及计算机程序;其中,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现一种充换
电站的换电方法。
37.本技术实施例提供的一种计算机可读存储介质,其上存储有计算机程序;所述计算机程序被处理器执行以实现一种充换电站的换电方法。
38.根据本发明实施例提供的方案,使得充电仓内的充电座能够保持满载电池箱,充分利用了换电仓的空间,且提升了充电仓的电池箱装载量。
39.尽管上文对本发明进行了详细说明,但是本发明不限于此,本技术领域技术人员可以根据本发明的原理进行各种修改。因此,凡按照本发明原理所作的修改,都应当理解为落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。