1.本发明涉及车辆换电技术领域,特别涉及一种基于双伸缩机构的换电方法、系统、设备及存储介质。
背景技术:
2.为响应全球节能减排号召,近年来,以燃油为动力源的机械设备逐渐被电动机械设备取代。但电动机械设备存在的电池包续航能力短、充电慢、电池包衰减快等问题也制约电动机械的应用。为了解决该问题,市场上提供了为电动设备直接换电的换电设备,以达到为电动机械进行快速能量补给的效果。
3.但是现有技术中,换电机构通常只设置有一个电池抓具,在换电时,该换电机构需要先抓取待换电车上的亏电的电池箱,然后将亏电的电池箱装入电池仓内,再抓取电池仓的满电电池箱,将满电的电池箱装入待换电车。换电机构仅设置一个电池抓具时,换电工序多,换电效率低,待换电车等待换电的时间长,换电体验差。
技术实现要素:
4.根据本发明实施例提供的方案解决的技术问题是如何实现快速换电。
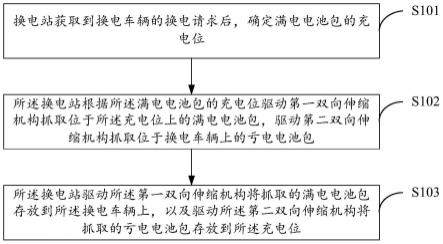
5.根据本发明实施例提供的一种基于双伸缩机构的换电方法,包括:
6.换电站获取到换电车辆的换电请求后,确定满电电池包的充电位;
7.所述换电站根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;
8.所述换电站驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。
9.根据本发明实施例提供的一种基于双伸缩机构的换电系统,包括:
10.换电车辆,用于向换电站发送换电请求;
11.换电站,用于获取到换电车辆的换电请求后,确定满电电池包的充电位;根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;以及驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。
12.根据本发明实施例提供的方案,有效提高了电动作业机械的换电效率,减少车辆等待时间,提高换电站的利用率。
附图说明
13.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于理解本发明,并不构成对本发明的不当限定。在附图中:
14.图1是本发明实施例提供的一种基于双伸缩机构的换电方法的流程图;
15.图2是本发明实施例提供的一种基于双伸缩机构的换电系统的示意图;
16.图3是本发明实施例提供的分体模式的双伸缩机构的示意图;
17.图4是本发明实施例提供的合体模式的双伸缩机构的示意图。
具体实施方式
18.以下结合附图对本发明的优选实施例进行详细说明,应当理解,以下所说明的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
19.图1是本发明实施例提供的一种基于双伸缩机构的换电方法的流程图,如图1所示,包括:
20.步骤s101:换电站获取到换电车辆的换电请求后,确定满电电池包的充电位;
21.每一电池固定座2120能够固定一个电池箱,且每一电池固定座2120能够给安装于其上的电池箱充电,即每一个电池固定座2120提供了一个充电位,如图4所示。
22.步骤s102:所述换电站根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;
23.步骤s103:所述换电站驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。
24.所述换电站包含:具有多个充电位的充电仓;用于第一双伸缩机构和第二双向伸缩机构沿轨道横向移动的换电仓;其中,所述换电仓中的轨道两端分别比所述充电仓多一个充电位的长度,如图4所示;或者所述充电仓的两端分别设有一个与充电位大小相同的空闲位,且所述充电仓与所述换电仓的长度相同。
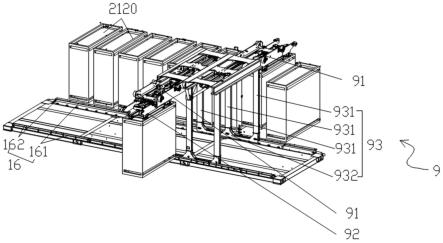
25.本发明实施例在所述换电站确定满电电池包的充电位之后,还包括:换电站确定所述第一双伸缩机构和所述第二双伸缩机构的设置模式为分体模式还是合体模式;如图3所示,所述分体模式是指所述第一双向伸缩机构设置在第一换电机器人上,所述第二双向伸缩机构设置在第二换电机器人上;如图4所示,所述合体模式是指所述第一双向伸缩机构和所述第二双向伸缩结构均设置在第三换电机器人上。
26.其中,所述换电站根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包包括:如图3所示,当所述换电站确定第一双伸缩机构和第二双伸缩机构的设置模式为分体模式时,将与所述满电电池包的充电位距离最近的换电机器人作为第一换电机器人,同时将未与所述满电电池包的充电位距离最近的换电机器人作为第二换电机器人,并向所述第一换电机器人发送第一指令,同时向所述第二换电机器人发送第二指令;所述第一换电机器人根据所述第一指令驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,同时所述第二换电机器人根据第二指令驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;或者所述第一换电机器人根据所述第一指令驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包之后,所述第二换电机器人根据第二指令驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;或者所述第二换电机器人根据第二指令驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包之后,所述第一换电机器人根据所述第一指令驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包。
27.优选地,如图3所示,当第一双伸缩机构和第二双伸缩机构的设置模式为分体模式时,换电站获取到换电车辆的换电请求且在换电车辆到达换电区域之前,确定满电电池包的充电位,并驱动第一换电机器人的第一双向伸缩机构抓取位于所述充电位上的满电电池包;当换电站检测到所述换电车辆到达换电区域时,首先驱动第二换电机器人的第二双向伸缩机构抓取位于换电车辆上的亏电电池包,然后驱动所述第一换电机器人的第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,最后驱动所述第二换电机器人的第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。
28.如图3所示,当第一双伸缩机构和第二双伸缩机构的设置模式为分体模式时,本技术实施例提供的换电站包括:支撑部、导轨16和换电机器人9。支撑部沿长度设置有多个电池固定座2120。导轨16设置于所述支撑部沿宽度方向的一侧,所述导轨16沿所述支撑部的长度方向延伸设置。换电机器人9可滑动地连接于所述导轨16。区别在于,换电机器人9为分体件,换电机器人9包括第一换电机器人和第二换电机器人,所述第一换电机器人和所述第二换电机器人相独立。第一换电机器人和第二换电机器人均可移动地设置于所述导轨16上且能沿导轨16平移运动。每一所述换电机器人9上均设置有一所述双向伸缩机构91。各所述双向伸缩机构91末端均设置有抓具92。双向伸缩机构91能沿垂直所述导轨16的方向双向伸缩以在支撑部和换电车辆之间进行电池箱转运。一个换电机器人9上的双向伸缩机构91架用于抓取换电车辆上的亏电电池箱并转运至电池固定座2120上,另一个换电机器人9上的双向伸缩机构91用于抓取电池固定座2120上的满电的电池箱,并装入换电车辆,通过两个双向伸缩机构91协同作业,显著地提高了换电效率。
29.在一种可能的实施方案中,所述第一换电机器人和所述第二换电机器人均具有两个框架体93,两个所述框架体93间隔设置,两个所述框架体93之间形成电池箱通道。所述双向伸缩机构91分别连接两个所述框架体93。
30.通过设置两个独立的换电机器人9,则在换电过程中,两个换电机器人9可独立运行,显著的提高了工作效率。例如,第一换电机器人可以先空载的状态下行进至换电工位抓取换电车辆上的亏点的电池箱,在这个过程中,第二换电机器人可以抓取满电的电池箱,在第一换电机器人工作结束后,第一换电机器人驶离换电工位,第二换电机器人可以行进至换电工位将满电的电池箱装入换电车辆上。
31.优选地,如图4所示,当第一双伸缩机构和第二双伸缩机构的设置模式为合体模式时,换电站获取到换电车辆的换电请求且在换电车辆到达换电区域之前,确定满电电池包的充电位,并驱动第三换电机器人的第一双向伸缩机构抓取位于所述充电位上的满电电池包;当换电站检测到所述换电车辆到达换电区域时,驱动第三换电机器人的第二双向伸缩机构抓取位于换电车辆上的亏电电池包,驱动所述第三换电机器人的第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第三换电机器人的第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。
32.如图4所示,当第一双伸缩机构和第二双伸缩机构的设置模式为合体模式时,本技术实施例提供的换电站包括:支撑部(支撑部可以为下文中的充电底箱210)、导轨16和换电机器人9。支撑部沿长度设置有多个电池固定座2120。导轨16设置于所述支撑部沿宽度方向的一侧,所述导轨16沿所述支撑部的长度方向延伸设置。换电机器人9可滑动地连接于所述导轨16,所述换电机器人9具有至少两个双向伸缩机构91,各所述双向伸缩机构91沿所述导
轨16的长度方向依次设置,各所述双向伸缩机构91末端均设置有抓具92。双向伸缩机构91能沿垂直所述导轨16的方向双向伸缩以在支撑部和换电车辆之间进行电池箱转运。本技术的换电设备的换电机器人9上设置两个双向伸缩机构91,一个双向伸缩机构91架用于抓取换电车辆上的亏电电池箱并转运至电池固定座2120上,另一个双向伸缩机构91用于抓取电池固定座2120上的满电的电池箱,并装入换电车辆,通过两个双向伸缩机构91协同作业,显著地提高了换电效率。
33.再者,本技术中通过在换电机器人9上设置两个双向伸缩机构91,可分别抓取亏电的电池箱和满电的电池箱,使得在换电过程中,可以不需要在支撑部上预留空载的电池固定座2120,使得支撑部上的各电池固定座2120能够保持满载电池箱,提升了充电仓的电池箱装载量。
34.在一种可能的实施方案中,所述导轨16具有主导轨161和延伸导轨162,所述主导轨161和所述支撑部上安装电池固定座的区域的长度相等所述延伸导轨162分设于所述主导轨161沿长度方向的两端,所述延伸导轨162的长度不小于所述电池固定座2120的延伸长度。
35.该实施方案中,当换电机器人9为一体结构时,换电机器人9的长度和两个电池固定座2120大致相等,当换电机器人9左侧的抓具92抓取了满电的电池箱而右侧抓具92则需要抓取换电车辆的亏电的电池箱,随后,换电机器人9需要平移,使得左侧的抓具92正对换电车辆以方便将满电的电池箱装入换电车辆。在需要将亏电的电池箱装入支撑部的末端时,换电机器人9可以移动至导轨16的末端,即左侧的抓具92位于延伸导轨162一侧,右侧的抓具92位于主导轨161的末端,方便右侧的抓具92将亏电的电池箱装入支撑部末端的电池固定座2120上。如此,可见,通过设置延伸导轨162,可以实现抓取支撑部上任何位置的满电电池箱,方便将亏电的电池箱装入支撑部末端的电池固定座2120上。
36.在一种可能的实施方案中,所述换电机器人9对应各所述双向伸缩机构91分别设置有相应的电池箱通道。在各所述电池箱通道均沿垂直所述导轨16的方向延伸,所述双向伸缩机构91能带动电池箱沿所述电池箱通道双向移动,电池箱穿过相应的电池箱通道的过程中不会和换电机器人9产生碰撞干涉。
37.在一种可能的实施方案中,所述换电机器人9具有多个框架体93,相邻两个框架体93之间形成一所述电池箱通道。每一所述双向伸缩机构91连接于相邻的两个框架体93上。
38.其中,所述换电站驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位包括:所述换电站向所述第一换电机器人发送第三指令,同时向所述第二换电机器人发送第四指令;所述第一换电机器人根据所述第三指令驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,同时所述第二换电机器人根据所述第四指令驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位;或者所述第一换电机器人根据所述第三指令驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上之后,所述第二换电机器人根据所述第四指令驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位;或者所述第二换电机器人根据所述第四指令驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位之后,所述第一换电机器人根据所述第三指令驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上。
39.其中,所述换电站根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包包括:当所述换电站确定第一双伸缩机构和第二双伸缩机构的设置模式为合体模式时,将与所述满电电池包的充电位距离最近的双伸缩机构作为第一双伸缩机构,同时将未与所述满电电池包的充电位距离最近的双伸缩机构作为第二双伸缩机构,并向所述第三换电机器人发送第五指令;所述第三换电机器人根据所述第五指令驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包之后,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;或者所述第三换电机器人根据所述第五指令驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包之后,驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包。
40.其中,所述换电站驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位包括:所述换电站向所述第三换电机器人发送第六指令;所述第三换电机器人根据所述第六指令驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上之后,驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位;或者所述第三换电机器人根据所述第六指令驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位之后,驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上。
41.图2是本发明实施例提供的一种基于双伸缩机构的换电系统的示意图,如图2所示,包括:换电车辆201,用于向换电站发送换电请求;换电站202,用于获取到换电车辆的换电请求后,确定满电电池包的充电位;根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;以及驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。
42.本技术实施例提供的一种电子设备,包括:存储器;处理器;以及计算机程序;其中,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现一种基于双伸缩机构的换电方法。
43.本技术实施例提供的一种计算机可读存储介质,其上存储有计算机程序;所述计算机程序被处理器执行以实现一种基于双伸缩机构的换电方法。
44.如图3和图4所示,本技术实施例还提供了双向伸缩机构91的结构。双向伸缩机构91包括多个伸缩架,相邻的伸缩架之间可滑动地连接,相邻的伸缩架之间连接有伸缩驱动件。伸缩驱动件可以包括伸缩油缸,伸缩油缸伸缩运动可驱动相邻的两个伸缩架之间相远离或相靠近。首端的伸缩架固定连接相邻的两个框架体93,末端的伸缩架上设置所述抓具92。抓具92具有抓取或释放电池箱的功能。
45.在一种可能的实施方案中,末端的伸缩架上设置升降机构,所述抓具连接于所述升降机构,所述升降机构能驱动所述抓具升降运动。
46.所述双向伸缩机构末端设置升降机构,所述抓具连接于所述升降机构。升降机构用于提升或下放抓具抓取的电池箱。
47.在一种可能的实施方案中,所述升降机构包括挠性件、滑动架和第二转向轮,所述滑动架可滑动地连接于所述顶部架,所述滑动架上设置第一转向轮。所述第二转向轮固定连接于所述顶部架。所述挠性件一端固定于所述顶部架,如固定于顶部架的固定座上。所述
挠性件分别绕经所述第一转向轮和第二转向轮后连接于所述抓具。顶部架对应第二转向轮设置有避让孔,挠性件贯穿该避让孔。所述滑动架滑动驱动所述挠性件起吊或下放抓具。其中,挠性件可以为吊绳、钢丝绳等等。该实施方案中,通过控制滑动架移动可以控制挠性件起吊或下放抓具。
48.其中,为了减小挠性件的起吊负载,延长使用寿命,同时为了方便平稳起到电池箱。本技术实施例中,可以设置多个挠性件,且对应各挠性件分别设置相应的第一转向轮和第二转向轮,各挠性件末端分别连接于抓具。
49.所述升降机构还包括第二伸缩部件,所述第二伸缩部件和所述滑动架连接,驱动所述滑动架滑动,以起吊或下放抓具。第二伸缩部件可以为伸缩油缸,第二伸缩部件伸长时,挠性件位于第一转向轮和第二转向轮之间的条段变长,则垂直顶部架向下延伸的挠性件的条段变短,起到提升抓具的效果。当第二伸缩部件缩短时,则相反的,垂直顶部架延伸的挠性件的条段变长起到下放电池箱的作用。
50.参见图3和图4所示,所述框架体93包括沿导轨宽度方向依次间隔设置的两个立柱931。所述换电机器人、所述第一换电机器人和所述第二换电机器人中的任意一者上位于所述导轨同一侧的各立柱931通过滑动梁932连接。所述滑动梁932和所述导轨可滑动地连接。滑动梁932的设计既能和导轨滑动配合,同时还增强了两个立柱931之间的结构强度,使得两个框架体结构稳定性好。
51.其中,滑动梁932上设置有驱动部件和多个滚轮,各所述滚轮均支撑于所述导轨上,所述驱动部件和部分所述滚轮传动连接,以驱动所述换电机器人沿所述导轨移动。驱动部件可以包括电机和减速箱,电机和减速箱的输入端传动连接,减速箱的输出端和至少一所述滚轮传动连接,驱动滚轮旋转电动换电机器人移动。
52.需要指出的是,本发明实施例在换电站驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包之前和在换电站驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上之前,还包括:设置在换电机器人(第一双向伸缩机构设置在第一换电机器人上;第二双向伸缩机构设置在第二换电机器人上)上的三个激光测距传感器分别检测其与换电车辆上亏电电池包的间距,并将每个激光测距传感器检测的间距信息发送给换电站;所述换电站根据所述每个激光测距传感器的间距信息,判断所述换电机器人是否与所述亏电电池包完全对齐;当判断所述换电机器人未与所述亏电电池包完全对齐时,所述换电站调整所述换电机器人的位置,使所述换电机器人与所述亏电电池包完全对齐,以便所述换电机器人完成所述换电车辆的换电操作。
53.其中,所述三个激光测距传感器包括左侧激光测距传感器、中间激光测距传感器以及右侧激光测距传感器;其中,所述间距信息包括左侧激光测距传感器检测的左侧间距信息、中间激光测距传感器检测的中间间距信息以及右侧激光测距传感器检测的右侧间距信息。
54.其中,所述换电站根据所述每个激光测距传感器的检测间距信息,判断所述换电机器人是否与所述亏电电池包完全对齐包括:当所述左侧间距信息、中间间距信息以及右侧间距信息均在预置的间距范围内时,所述换电站判断所述换电机器人与所述亏电电池包完全对齐;当所述左侧间距信息或所述右侧间距信息不在预置的间距范围内时,所述换电站判断所述换电机器人未与所述亏电电池包完全对齐。
55.具体地说,当判断所述换电机器人未与所述亏电电池包完全对齐时,所述换电站调整所述换电机器人的位置,使所述换电机器人与所述亏电电池包完全对齐包括:当所述左侧间距信息不在预置的间距范围内时,所述换电站向所述换电机器人发送向右移动指令,使所述换电机器人根据所述向右移动指令沿轨道向右调整位置,使所述换电机器人与所述亏电电池包完全对齐;当所述右侧间距信息不在预置的间距范围内时,所述换电站向所述换电机器人发送向左移动指令,使所述换电机器人根据所述向左移动指令沿轨道向左调整位置,使所述换电机器人与所述亏电电池包完全对齐。
56.具体地说,所述换电站根据所述每个激光测距传感器的检测间距信息,判断所述换电机器人是否与所述亏电电池包完全对齐包括:当所述左侧间距信息和所述右侧间距信息均大于预置的间距范围,且所述中间间距信息在预置的间距范围内时,所述换电站判断所述换电机器人与所述亏电电池包完全对齐;当所述左侧间距信息或所述右侧间距信息在预置的间距范围内时,所述换电站判断所述换电机器人未与所述亏电电池包完全对齐。
57.具体地说,当判断所述换电机器人未与所述亏电电池包完全对齐时,所述换电站调整所述换电机器人的位置,使所述换电机器人与所述亏电电池包完全对齐包括:当所述左侧间距信息在预置的间距范围内时,所述换电站向所述换电机器人发送向左移动指令,使所述换电机器人根据所述向左移动指令沿轨道向左调整位置使所述换电机器人与所述亏电电池包完全对齐;当所述右侧间距信息在预置的间距范围内时,所述换电站向所述换电机器人发送向右移动指令,使所述换电机器人根据所述向右移动指令沿轨道向右调整位置,使所述换电机器人与所述亏电电池包完全对齐。
58.根据本发明实施例提供的方案有效提高了电动作业机械的换电效率,减少车辆等待时间,提高换电站的利用率。
59.尽管上文对本发明进行了详细说明,但是本发明不限于此,本技术领域技术人员可以根据本发明的原理进行各种修改。因此,凡按照本发明原理所作的修改,都应当理解为落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。