1.本发明涉及仿生机器人和压电驱动领域,尤其涉及一种微小型仿生鳐鱼水下推进器及其驱动方法。
背景技术:
2.海洋和海岛国防在国家经济发展中占有举足轻重的地位。由于水文信息获取、海洋资源勘探以及国防建设的需要,水下仿生推进器取得了很大程度的发展。
3.水下仿生推进器可以成为一个多方位持续信息获取的工具。现有的水下仿生推进器多依靠电磁电机控制并依靠多关节串联装置驱动,这种驱动方式结构庞大控制复杂,并存在水密封等问题。
4.压电双晶片具有结构简单、质量轻、带宽高、输出位移比普通压电陶瓷片大的优点,采用压电双晶片驱动的仿生鳐鱼水下推进器无需传动机构,有利于结构微小型化、控制简单化,且不存在水密封问题,应用场景更加广泛。
技术实现要素:
5.本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种微小型仿生鳐鱼水下推进器及其驱动方法。
6.本发明为解决上述技术问题采用以下技术方案:一种微小型仿生鳐鱼水下推进器,包括振动部和柔性鳍;所述振动部包含第一至第四纵向压电双晶片、第一至第四横向压电双晶片、第一至第二纵向连接板、第一至第二横向连接板、第一至第四双向连接板、以及第一至第八桨叶;所述第一至第四纵向压电双晶片、第一至第四横向压电双晶片均呈矩形,皆沿厚度方向极化且极化方向均相同;所述第一至第二纵向连接板、第一至第二横向连接板、第一至第四双向连接板均呈矩形;所述第一纵向连接板两端分别和所述第一纵向压电双晶片、第二纵向压电双晶片的一端粘贴相连,第二纵向连接板两端分别和所述第三纵向压电双晶片、第四纵向压电双晶片的一端粘贴相连;所述第一横向连接板两端分别和所述第一横向压电双晶片、第二横向压电双晶片的一端粘贴相连,第二横向连接板两端分别和所述第三横向压电双晶片、第四横向压电双晶片的一端粘贴相连;所述第一双向连接板一端和所述第一桨叶的一端粘贴相连,另一端和所述第一纵向压电双晶片的另一端粘贴相连,且第一双向连接板一侧和所述第一横向压电双晶片的另一端粘贴相连,另一侧和所述第八桨叶的一端粘贴相连;所述第二双向连接板一端和所述第二桨叶的一端粘贴相连,另一端和所述第三纵
向压电双晶片的另一端粘贴相连,且第二双向连接板一侧和所述第二横向压电双晶片的另一端粘贴相连,另一侧和所述第三桨叶的一端粘贴相连;所述第三双向连接板一端和所述第五桨叶的一端粘贴相连,另一端和所述第四纵向压电双晶片的另一端粘贴相连,且第三双向连接板一侧和所述第四横向压电双晶片的另一端粘贴相连,另一侧和所述第四桨叶的一端粘贴相连;所述第四双向连接板一端和所述第六桨叶的一端粘贴相连,另一端和所述第二纵向压电双晶片的另一端粘贴相连,且第三双向连接板一侧和所述第三横向压电双晶片的另一端粘贴相连,另一侧和所述第七桨叶的一端粘贴相连;所述柔性鳍采用弹性模量小于预设的弹性阈值的柔性材料制成,呈八边形,和所述振动部的上端面粘贴相连,使得第一至第八桨叶的另一端分别在其八个顶点上。
7.作为本发明一种微小型仿生鳐鱼水下推进器进一步的优化方案,所述第一至第四纵向压电双晶片、第一至第四横向压电双晶片上均涂有防水涂料。
8.作为本发明一种微小型仿生鳐鱼水下推进器进一步的优化方案,所述柔性鳍采用硅橡胶制成。
9.本发明还公开了一种该微小型仿生鳐鱼水下推进器的推进方法,包含以下步骤:需要正向波动推进时,采用第一电信号激励第一至第四纵向压电双晶片,产生纵向一阶弯曲振动,带动柔性鳍产生纵向的一阶弯曲振动,同时采用第二电信号激励第一、第二横向压电双晶片,采用第三电信号激励第三、第四横向压电双晶片,第一、第二电信号的相位差为π/2,第一、第三电信号的相位差为-π/2,第二、第三电信号的相位差为π,产生相位差为π的两个横向一阶弯曲振动,带动柔性鳍产生纵向的二阶弯曲振动,纵向的一阶弯曲振动和纵向的二阶弯曲振动叠加形成纵向方向上的的行波,实现柔性鳍的水中纵向波动推进;如需仿生鳐鱼水下推进器实现水中反向的波动推进,调整第二、第三电信号的相位差为-π即可。
10.本发明还公开了一种该微小型仿生鳐鱼水下推进器的旋转方法,包含以下步骤:需要正向旋转时,采用第一电信号激励第一、第二纵向压电双晶片,采用第二电信号激励第三、第四纵向压电双晶片,第一、第二电信号的相位差为π,产生相位差为π的两个纵向一阶弯曲振动,带动柔性鳍产生横向的二阶弯曲振动,同时采用第三电信号激励第一、第二横向压电双晶片,采用第四电信号激励第三、第四横向压电双晶片,第一、第三电信号的相位差为π/2,第一、第四电信号的相位差为-π/2,第三、第四电信号的相位差为π,产生相位差为π的两个横向一阶弯曲振动,带动柔性鳍产生纵向的二阶弯曲振动,横向的二阶弯曲振动和纵向的二阶弯曲振动叠加形成旋转的行波,实现柔性鳍的水中旋转运动;如需仿生鳐鱼水下推进器实现水中反向旋转,调整第一、第二电信号的相位差为-π,第三、第四电信号的相位差为-π即可。
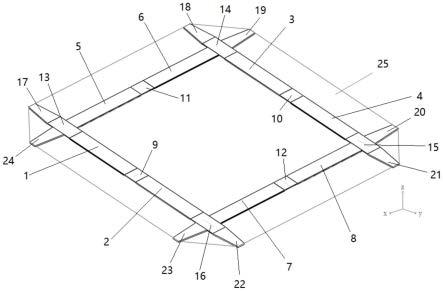
11.本发明采用以上技术方案与现有技术相比,具有以下技术效果:1. 结构简单,便于微小型化;2. 控制方式简单;3. 应用场景更加广泛附图说明图1是本发明的结构示意图;
图2是本发明中推进模式下第一纵向压电双晶片的极化方向以及接线示意图;图3(a)、图3(b)分别是本发明中推进模式下第一横向压电双晶片、第三横向压电双晶片的极化方向以及接线示意图;图4是本发明中推进模式下纵向一阶弯曲振动的振型示意图;图5(a)是本发明中推进模式下第一、第二横向压电双晶片引起的横向一阶弯曲振动的振型示意图;图5(b)是本发明中推进模式下第三、第四横向压电双晶片引起的横向一阶弯曲振动的振型示意图;图6(a)、图6(b)分别是本发明中旋转模式下第一纵向压电双晶片、第三纵向压电双晶片的极化方向以及接线示意图;图7(a)、图7(b)是本发明中旋转模式下第一横向压电双晶片、第三横向压电双晶片的极化方向以及接线示意图;图8(a)是本发明中旋转模式下第一、第二纵向压电双晶片引起的纵向一阶弯曲振动的振型示意图;图8(b)是本发明中旋转模式下第三、第四纵向压电双晶片引起的纵向一阶弯曲振动的振型示意图;图9(a)是本发明中旋转模式下第一、第二横向压电双晶片引起的横向一阶弯曲振动的振型示意图;图9(b)是本发明中旋转模式下第三、第四横向压电双晶片引起的横向一阶弯曲振动的振型示意图。
12.图中,1-第一纵向压电双晶片组,2-第二纵向压电双晶片组,3-第三纵向压电双晶片组,4-第四纵向压电双晶片组,5-第一横向压电双晶片组,6-第二横向压电双晶片组,7-第三横向压电双晶片组,8-第四横向压电双晶片组,9-第一纵向连接板,10-第二纵向连接板,11-第一横向连接板,12-第二横向连接板,13-第一双向连接板,14-第二双向连接板,15-第三双向连接板,16-第四双向连接板,17-第一桨叶,18-第二桨叶,19-第三桨叶,20-第四桨叶,21-第五桨叶,22-第六桨叶,23-第七桨叶,24-第八桨叶,25-柔性鳍。
具体实施方式
13.下面结合附图对本发明的技术方案做进一步的详细说明:本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本发明公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
14.如图1所示,本发明公开了一种微小型仿生鳐鱼水下推进器,包括振动部和柔性鳍;所述振动部包含第一至第四纵向压电双晶片、第一至第四横向压电双晶片、第一至第二纵向连接板、第一至第二横向连接板、第一至第四双向连接板、以及第一至第八桨叶;所述第一至第四纵向压电双晶片、第一至第四横向压电双晶片均呈矩形,皆沿厚度方向极化且极化方向均相同;所述第一至第二纵向连接板、第一至第二横向连接板、第一至第四双向连接板均呈矩形;所述第一纵向连接板两端分别和所述第一纵向压电双晶片、第二纵向压电双晶片
的一端粘贴相连,第二纵向连接板两端分别和所述第三纵向压电双晶片、第四纵向压电双晶片的一端粘贴相连;所述第一横向连接板两端分别和所述第一横向压电双晶片、第二横向压电双晶片的一端粘贴相连,第二横向连接板两端分别和所述第三横向压电双晶片、第四横向压电双晶片的一端粘贴相连;所述第一双向连接板一端和所述第一桨叶的一端粘贴相连,另一端和所述第一纵向压电双晶片的另一端粘贴相连,且第一双向连接板一侧和所述第一横向压电双晶片的另一端粘贴相连,另一侧和所述第八桨叶的一端粘贴相连;所述第二双向连接板一端和所述第二桨叶的一端粘贴相连,另一端和所述第三纵向压电双晶片的另一端粘贴相连,且第二双向连接板一侧和所述第二横向压电双晶片的另一端粘贴相连,另一侧和所述第三桨叶的一端粘贴相连;所述第三双向连接板一端和所述第五桨叶的一端粘贴相连,另一端和所述第四纵向压电双晶片的另一端粘贴相连,且第三双向连接板一侧和所述第四横向压电双晶片的另一端粘贴相连,另一侧和所述第四桨叶的一端粘贴相连;所述第四双向连接板一端和所述第六桨叶的一端粘贴相连,另一端和所述第二纵向压电双晶片的另一端粘贴相连,且第三双向连接板一侧和所述第三横向压电双晶片的另一端粘贴相连,另一侧和所述第七桨叶的一端粘贴相连;所述柔性鳍采用弹性模量小于预设的弹性阈值的柔性材料制成,呈八边形,和所述振动部的上端面粘贴相连,使得第一至第八桨叶的另一端分别在其八个顶点上。
15.作为本发明一种微小型仿生鳐鱼水下推进器进一步的优化方案,所述第一至第四纵向压电双晶片、第一至第四横向压电双晶片上均涂有防水涂料。
16.作为本发明一种微小型仿生鳐鱼水下推进器进一步的优化方案,所述柔性鳍采用硅橡胶制成。
17.本发明还公开了一种该微小型仿生鳐鱼水下推进器的推进方法,包含以下步骤:需要正向波动推进时,采用第一电信号激励第一至第四纵向压电双晶片,如图2所示,产生纵向一阶弯曲振动,带动柔性鳍产生纵向的一阶弯曲振动,如图4所示,同时采用第二电信号激励第一、第二横向压电双晶片,采用第三电信号激励第三、第四横向压电双晶片,如图3(a)、图3(b)所示,第一、第二电信号的相位差为π/2,第一、第三电信号的相位差为-π/2,第二、第三电信号的相位差为π,产生相位差为π的两个横向一阶弯曲振动,如图5(a)、图5(b)所示,带动柔性鳍产生纵向的二阶弯曲振动,纵向的一阶弯曲振动和纵向的二阶弯曲振动叠加形成纵向方向上的的行波,实现柔性鳍的水中纵向波动推进;如需仿生鳐鱼水下推进器实现水中反向的波动推进,调整第二、第三电信号的相位差为-π即可。
18.本发明还公开了一种该微小型仿生鳐鱼水下推进器的旋转方法,包含以下步骤:需要正向旋转时,采用第一电信号激励第一、第二纵向压电双晶片,采用第二电信号激励第三、第四纵向压电双晶片,如图6(a)、图6(b)所示,第一、第二电信号的相位差为π,产生相位差为π的两个纵向一阶弯曲振动,如图8(a)、图8(b)所示,带动柔性鳍产生横向的二阶弯曲振动,同时采用第三电信号激励第一、第二横向压电双晶片,采用第四电信号激励第三、第四横向压电双晶片,如图7(a)、图7(b)所示,第一、第三电信号的相位差为π/2,第
一、第四电信号的相位差为-π/2,第三、第四电信号的相位差为π,产生相位差为π的两个横向一阶弯曲振动,如图9(a)、图9(b)所示,带动柔性鳍产生纵向的二阶弯曲振动,横向的二阶弯曲振动和纵向的二阶弯曲振动叠加形成旋转的行波,实现柔性鳍的水中旋转运动;如需仿生鳐鱼水下推进器实现水中反向旋转,调整第一、第二电信号的相位差为-π,第三、第四电信号的相位差为-π即可。
19.本发明结构简单,便于微小型化,控制方式简单,应用场景更加广泛。
20.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
21.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。