1.本发明涉及驱动控制装置、车辆。
2.本技术基于在2020年3月25日向日本提出了申请的特愿2020-54193号而主张优先权,并将其内容援引于此。
背景技术:
3.以往,在车辆的驱动系统设置的齿轮彼此的啮合部以及各种可动部分,乘员有时会感觉到构件彼此接触(碰撞)的冲击。由于构件之间形成的间隙,在起步时、加速时、减速时等,在从构件彼此隔开间隙的状态起构件彼此相互啮合时产生该冲击。
4.与此相对,例如,在专利文献1中公开了在通过电动马达对驱动轮的旋转轴进行驱动的电动车辆中,防止在起步时产生消隙(backlash reduction)冲击的结构。该结构在起步时在油门操作之前向电动马达赋予初始转矩,预先进行电动马达的驱动系统的消隙,由此防止在起步时产生消隙冲击。此外,专利文献1公开了在以下的情况下对电动马达进行驱动控制以进行驱动侧的消隙的结构。该情况是从通过电动马达的驱动力对驱动轮进行驱动的驱动状态成为通过驱动轮对电动马达进行驱动的被驱动状态的情况。此外,在专利文献1中记载了在旋转轴高速旋转时中止所述消隙控制的情况。
5.在先技术文献
6.专利文献
7.专利文献1:日本专利第4747818号公报
技术实现要素:
8.发明的概要
9.发明要解决的课题
10.但是,在实际的车辆的行驶中存在各种状况,如果在所有状况下都过度优先消隙控制,则会给乘员带来不适感。因此,希望进一步抑制该不适感。
11.本发明是鉴于上述实际情况而完成的,其目的在于提供一种能够以更少的不适感来操纵由原动机驱动的车辆的驱动控制装置及车辆。
12.用于解决课题的方案
13.本发明的第一方案涉及一种驱动控制装置(120),其是通过包括原动机(30)的动力单元(p)的驱动力来驱动驱动轮(4a、4b)旋转的车辆(1)的驱动控制装置(120),其特征在于,所述驱动控制装置(120)具备调整所述原动机(30)的转矩的油门(110),在所述油门(110)的开度为全闭状态的情况下,在所述车辆(1)的行驶速度处于预先设定的第一速度范围(v1)时,通过所述动力单元(p),将使所述车辆(1)向前方行进时的第一旋转方向(r1)的转矩(t1)赋予给所述驱动轮(4a、4b),在所述车辆(1)的行驶速度处于设定在比所述第一速度范围(v1)靠高速侧的第二速度范围(v2)时,通过所述动力单元(p),将与所述第一旋转方向(r1)相反方向的第二旋转方向(r2)的转矩(t2)赋予给所述驱动轮(4a、4b)。
14.本发明的第二方案以上述第一方案为基础,其特征在于,所述驱动控制装置(120)具备:油门开度传感器(121),其检测所述油门(110)的开度;车速传感器(122),其检测所述车辆(1)的行驶速度;映射存储部(123),其存储表示所述油门(110)的开度、所述车辆(1)的行驶速度及由所述动力单元(p)产生的转矩的相关的映射信息(im);控制部(124),其基于存储于所述映射存储部(123)的所述映射信息(im),使所述动力单元(p)产生与由所述油门开度传感器(121)检测的所述油门(110)的开度及由所述车速传感器(122)检测的所述车辆(1)的行驶速度对应的转矩。
15.本发明的第三方案以上述第二方案为基础,其特征在于,所述车速传感器(122)基于由所述原动机(30)驱动的旋转轴(45)的旋转速度,检测所述车辆(1)的行驶速度。
16.本发明的第四方案以上述第一至第三方案的任一方案为基础,其特征在于,在所述车辆(1)的行驶速度处于所述第一速度范围(v1)时,通过所述动力单元(p)以恒定的转矩值向所述驱动轮(4a、4b)赋予所述转矩(t1)。
17.本发明的第五方案以上述第一至第四方案的任一方案为基础,其特征在于,在设定在所述第一速度范围(v1)与所述第二速度范围(v2)之间的第三速度范围(v3)中,使通过所述动力单元(p)向所述驱动轮(4a、4b)赋予的转矩(t3)连续地变化。
18.本发明的第六方案以上述第一至第五方案的任一方案为基础,其特征在于,在所述车辆(1)的行驶速度处于设定在比所述第一速度范围(v1)靠低速侧的第四速度范围(v4)时,通过所述动力单元(p),将比所述第一速度范围(v1)小的转矩(t4)赋予给所述驱动轮(4a、4b)。
19.本发明的第七方案以上述第六方案为基础,其特征在于,所述第四速度范围(v4)包括所述车辆(1)的停止状态,在所述车辆(1)的停止状态下,所述转矩(t4)为零。
20.本发明的第八方案以上述第六方案为基础,其特征在于,在所述车辆(1)的停止状态下,将比所述第一速度范围(v1)大的转矩(t0)赋予给所述驱动轮(4a、4b)。
21.本发明的第九方案以上述第六至第八方案的任一方案为基础,其特征在于,在设定在所述第一速度范围(v1)与所述第四速度范围(v4)之间的第五速度范围(v5)中,使通过所述动力单元(p)向所述驱动轮(4a、4b)赋予的转矩(t5)连续地变化。
22.本发明的第十方案提供一种车辆(1),其特征在于,其具备上述第一至第九方案的任一方案记载的驱动控制装置(120)。
23.发明效果
24.根据上述第一及第二方案,在油门的开度为全闭状态且车辆的行驶速度在第一速度范围的情况下,进行以下的控制。即,通过动力单元,将使车辆向前方行进时的第一旋转方向的转矩向驱动轮赋予。由此,在将油门从全闭状态打开时,驱动系统的齿隙被消除。因此,能够抑制在使车辆加速时产生的冲击。
25.另外,在油门的开度为全闭状态且车辆的行驶速度处于比第一速度范围靠高速侧的第二速度范围时、即在车辆的行驶中使油门成为全闭状态时,进行以下的控制。即,通过动力单元,将与使车辆向前方行进时的第一旋转方向相反方向的第二旋转方向的转矩(反向转矩)向驱动轮赋予。在该状态下,由于未通过动力单元赋予对车辆进行加速的方向的转矩,因此能够抑制因动力单元的驱动力而产生空走感。此外,在该状态下,使车辆减速的方向的转矩(发动机制动)由动力单元赋予,因此在抑制了车辆的制动负载的基础上提高行驶
稳定性。其结果是,能够以更少的不适感来操纵由动力单元驱动的车辆。
26.根据上述第三方案,基于旋转轴的旋转速度来检测车辆的行驶速度,由此能够以更简易的手段直接检测车速。
27.根据上述第四方案,在低速侧的第一速度范围内由动力单元赋予的转矩为恒定的转矩值,因此对车辆的低速行驶造成的影响恒定。因此,乘员难以感觉到由动力单元赋予的转矩。因此,能够更难以给乘员带来不适感。
28.根据上述第五方案,在第一速度范围与第二速度范围之间的第三速度范围内,使由动力单元赋予的转矩连续地变化。由此,在油门的开度仍为全闭状态的情况下车速从第二速度范围向第一速度范围变化时、即车辆的减速时,能够抑制加速感的产生。而且,乘员难以感觉到由动力单元赋予的转矩的变动。因此,能够更难以给乘员带来不适感。
29.根据上述第六方案,在车辆处于更低速的状态时,乘员更难以感觉到由动力单元赋予的转矩。而且,能够抑制给车辆的极低速行驶造成的影响。
30.根据上述第七方案,在车辆的停止状态下从动力单元赋予的转矩为零,因此能够抑制停止状态的车辆意外地开始移动的情况。即,在车辆克服动力单元的转矩而停止时,例如有时将货物装载于车辆或者乘员上下车辆而向车辆施加外力。此时,车辆有可能由于动力单元的转矩而开始移动。通过在车辆的停止状态下从动力单元赋予的转矩成为零,由此能够消除这样的担心。
31.根据上述第八方案,在车辆的停止状态下赋予比第一速度范围大的转矩,因此能够可靠地进行动力单元的消隙。即,例如在车辆的起动时为了进行动力单元的消隙,需要比车辆从行驶状态减速而停止时的消隙大的转矩。即使在这样的情况下,也能够可靠地进行动力单元的消隙。
32.根据上述第九方案,在第一速度范围与第四速度范围之间的第五速度范围内,使由动力单元赋予的转矩连续地变化,由此具有以下的作用。即,在油门的开度仍为全闭状态的情况下车速从第一速度范围向第四速度范围变化时、即车辆的向极低速的转移时,能够抑制车辆产生加速感的情况。而且,乘员难以感觉到由动力单元赋予的转矩的变动。因此,能够更难以给乘员带来不适感。
33.根据上述第十方案,通过具备上述那样的驱动控制装置,能够以更少的不适感来操纵由动力单元驱动的车辆。
附图说明
34.图1是本发明的实施方式的车辆的左视图。
35.图2是将上述车辆的动力单元的主要轴并排表示的展开剖视图。
36.图3是表示上述车辆中的驱动控制装置的结构的框图。
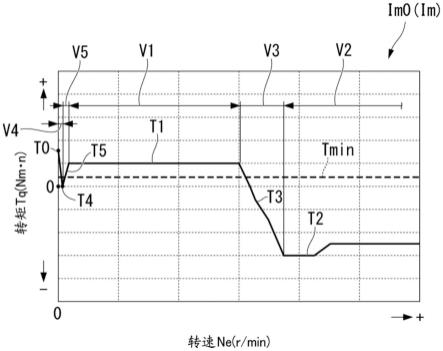
37.图4是表示上述驱动控制装置的控制中使用的映射信息的一例的映射。
具体实施方式
38.以下,参照附图对本发明的实施方式进行说明。需要说明的是,以下的说明中的前后左右等的朝向只要没有特别记载,就与以下说明的车辆中的朝向相同。而且,在以下的说明使用的图中适当位置示出表示车辆前方的箭头fr,表示车辆左方的箭头lh,表示车辆上
方的箭头up。
39.如图1、图2所示,本实施方式的电动车辆(车辆)1将作为转向轮的一轮的前轮2支承于前车身(车身前部结构体)3。电动车辆1将作为驱动轮的左右一对后轮(驱动轮)4a、4b支承于后车身(车身后部结构体)5。电动车辆1能够使乘员乘坐的前车身(摆动侧车身)3相对于使左右后轮4a、4b接地的后车身(非摆动侧车身)5左右摆动(侧倾移动)。电动车辆1构成为摆动式的电动三轮车。
40.前车身3具备前轮转向用的操作手柄6以及乘员就座用的座椅7。前车身3将操作手柄6与座椅7之间设为跨骑空间8,在跨骑空间8的下方具备低地板底面9。
41.前车身3及后车身5经由转动机构(侧倾接头)50相互连结。图1中符号c1表示转动机构50中的沿车辆前后方向延伸的转动轴线。
42.参照图1,前车身3具备前车身框架11。前车身框架11具备:单一的前部框架14,其从头管12的后侧向下方延伸之后向后方弯曲;左右一对下部框架15,其从前部框架14的弯曲部两侧向左右分支之后向后方延伸;以及左右一对后部框架16,其从左右下部框架15的后端部向斜后上方弯曲延伸。前轮悬架装置(例如伸缩式前叉)13能够转向地支承于头管12。前轮2支承于前轮悬架装置13的下端部。
43.在左右后部框架16的下部之间配置有未图示的下横框架。转动机构50的前结构体50f固定地支承于下横框架。
44.在电动车辆1的转弯行驶时,前车身3相对于使左右后轮4a、4b接地于路面的后车身5,经由转动机构50向转弯方向摆动(倾斜)。由此,前车身3使作为转向轮的前轮2产生转向角。
45.包括前车身框架11的前车身3的整体由前车身罩90覆盖。前车身罩90具备:前罩91及内罩92,从前方及后方分别覆盖头管12及前部框架14的周边;底板93,其与内罩92的下端部的后方相连;以及座椅下罩94,其在底板93的后方立起而到达座椅7的下方。底板93与左右下部框架15等一起构成低地板底面9。座椅下罩94形成前低后高地倾斜的后部倾斜部94a。
46.后车身5具备相对于前车身框架11独立的后车身框架21。后车身框架21具备:第二后部框架22,其从转动机构50的后结构体50r(非转动区域)向斜后上方延伸;以及后上部框架23,其从第二后部框架22的上端部向后方延伸。第二后部框架22及后上部框架23例如相互一体地形成。后车身框架21在左右方向上位于左右后轮4a、4b之间。
47.摇摆单元40的前端部支承于转动机构50的后结构体50r的后端部。摇摆单元40的前端部经由沿着左右方向(延伸)的摇摆轴(枢轴)41被支承为能够上下摆动。摇摆单元40的后端部经由左右后减振器(未图示)连结并支承于后车身框架21的上后部。包括这些摇摆单元40、左右后减振器(未图示)及后车身框架21在内,在后车身5构成后轮悬架装置(后悬架)。
48.包括后车身框架21的后车身5的整体由后车身罩70覆盖。后车身罩70具备:前壁部71,其形成与第二后部框架22大致平行的倾斜前表面;上壁部72,其从前壁部71的上端部向后方大致水平地延伸;以及后挡泥板74,覆盖左右后轮4a、4b的上方。上壁部72与后上部框架23等一起在后车身5的上表面构成货架75。前壁部71与前车身3的后部倾斜部94a大致平行。前壁部71在与后部倾斜部94a之间隔开间隙地配置,该间隙被设定为在前后车身3、5的
相对摆动时不与后部倾斜部94a发生干涉的程度。
49.如图2所示,摇摆单元40配置在左右后轮4a、4b之间。摇摆单元40在侧视观察下配置成从摇摆轴41延伸至后轮车轴42。摇摆单元40使长度方向朝向前后方向地配置。
50.摇摆单元40构成为包括电动车辆1的驱动源即电动马达(原动机)30的动力单元p。摇摆单元40具备:单元壳体43,其作为将左右后轮4a、4b支承为能够上下摆动的结构体(摆臂);电动马达30,其收纳在单元壳体43的前部左侧内;以及差动机构44,其收纳在单元壳体43的后部内。摇摆单元40在搭载于副臂43a(参照图1)的状态下,能够摆动地连结于转动机构50。
51.在单元壳体43内设置有旋转轴45、副轴47以及后轮车轴42。旋转轴45、副轴47及后轮车轴42分别使轴中心沿着车身左右方向延伸且相互平行地设置。在单元壳体43的前部左侧内收纳马达外壳46。
52.在动力单元p的前部内侧具备驻车锁定机构80,该驻车锁定机构80在坡路停车等时进行锁定以使左右后轮4a、4b不旋转。
53.旋转轴45设置在单元壳体43内的前部。参照图2,旋转轴45是电动马达30的输出轴。旋转轴45经由轴承51、52能够旋转地设置于在单元壳体43内设置的马达外壳46。在马达外壳46内设置电动马达30。电动马达30具备:转子31,其固定在旋转轴45的径向外侧;以及定子32,其设置在转子31的径向外侧并固定于马达外壳46。
54.旋转轴45从马达外壳46向车身右侧突出设置。旋转轴45的突出部分经由轴承53a能够旋转地支承于在马达外壳46的右侧突出设置的轴环的前端部。旋转轴45的右端部经由轴承53b能够旋转地支承于单元壳体43的右侧壁。
55.在旋转轴45的右突出部中,在位于两轴承53a、53b之间的部位设置有小齿轮54。小齿轮54例如使用螺旋齿轮。
56.副轴47相对于旋转轴45设置在车身后方。副轴47的两端部经由轴承55、56能够旋转地支承于单元壳体43。在副轴47设置有与旋转轴45的小齿轮54啮合的比较大径的传递齿轮57。由此,旋转轴45的旋转向副轴47减速传递。在副轴47的外周面中,相对于传递齿轮57在车身左侧刻设置有小齿轮58。
57.后轮车轴42相对于旋转轴45及副轴47设置在车辆后方。
58.后轮车轴42相互同轴且分体地具备右侧车轴42r和左侧车轴42l。左侧车轴42l经由轴承59l能够旋转地支承于单元壳体43的左侧部。左侧的后轮4a的中心部能够一体旋转地支承于左侧车轴42l的左端部。右侧车轴42r经由轴承59r能够旋转地支承于单元壳体43的右侧部。右侧的后轮4b的中心部能够一体旋转地支承于右侧车轴42r的右端部。
59.在右侧车轴42r与左侧车轴42l之间设置有差动机构44。差动机构44收纳在单元壳体43的后部右侧内。差动机构44具备差速器壳体61、一对小齿轮62以及一对半轴齿轮63。
60.差速器壳体61经由轴承60a、60b能够旋转地支承于单元壳体43。一对小齿轮62设置在差速器壳体61内。一对小齿轮62由销64进行轴支承。一对半轴齿轮63在差速器壳体61内设置在左右两侧。右侧车轴42r的左端部花键嵌合于右侧的半轴齿轮63。左侧车轴42l的右端部花键嵌合于左侧的半轴齿轮63。
61.在差速器壳体61的左侧部的外周面设置有输出齿轮65。输出齿轮65与形成于副轴47的小齿轮58啮合。输出齿轮65比小齿轮58大径。由此,副轴47的旋转向差速器壳体61减速
传递。通过差速器壳体61旋转而经由差动机构44驱动后轮车轴42(右侧车轴42r、左侧车轴42l)旋转。
62.上述那样的动力单元p的电动马达30由图1所示的蓄电池100的电力来驱动。电动马达30例如通过vvvf(variable voltage variable frequency)控制进行可变速驱动。电动马达30如具有无级变速器那样被进行变速控制,但是并不限定于此,也可以如具有有级变速器那样被进行变速控制。蓄电池100例如设置在前车身3的座椅7的下方。
63.电动马达30由图4所示那样的驱动控制装置120控制其动作。驱动控制装置120具备油门开度传感器121、车速传感器122、映射存储部123以及控制部124。
64.油门开度传感器121检测设置在操作手柄6的车身右侧设置的油门把手(油门)110的开度。油门把手110是用于调整电动车辆1行驶的速度(车速)的操作件。对于油门把手110,乘员进行调整其开度的操作。电动马达30以与油门把手110的开度对应的转速工作,将与转速对应的驱动力(转矩)向左右后轮4a、4b赋予。
65.车速传感器122检测电动车辆1的行驶速度。车速传感器122例如也能够检测前轮2的转速。在本实施方式中,车速传感器122检测由电动马达30驱动的旋转轴45的旋转速度,由此检测电动车辆1的行驶速度。
66.映射存储部123存储预先设定的映射信息im(参照图4)。映射信息im用于使电动马达30产生与油门把手110的开度对应的转矩。映射信息im按照油门把手110的每个开度来设定。映射信息im按照油门把手110的每个开度来设定电动车辆1的行驶速度与由电动马达30产生的转矩的相关。图4的映射信息im是油门把手110的开度为全闭状态(开度=0)时的信息。图4的映射信息im是表示电动车辆1的行驶速度与由电动马达30产生的转矩的相关的映射信息im0。
67.控制部124基于存储于映射存储部123的映射信息im、由油门开度传感器121检测的油门把手110的开度、以及由车速传感器122检测的电动车辆1的行驶速度,来控制(调整)由电动马达30产生的转矩。
68.在作为硬件的pcu(power control unit)125功能性地具备映射存储部123及控制部124。映射存储部123设定在pcu125所具备的存储区域中。控制部124通过基于预先设定于pcu125的计算机程序执行的处理而功能性地实现。pcu125是一体地具备例如pdu(power driver unit)及ecu(electric control unit)的控制单元。
69.(驱动控制装置中的转矩控制)
70.驱动控制装置120的控制部124从油门开度传感器121取得油门把手110的开度的检测结果。控制部124参照存储于映射存储部123的与所取得的油门把手110的开度对应的映射信息im。在所取得的油门把手110的开度为全闭状态以外的情况下,控制部124参照与该开度对应的映射信息im。控制部124通过电动马达30产生与由车速传感器122检测到的电动车辆1的行驶速度对应的转矩。
71.在从油门开度传感器121取得的油门把手110的开度为全闭状态的情况下,控制部124参照图4所示的映射信息im0。
72.在油门把手110的开度为全闭状态时的映射信息im0中,在设定在低速侧的第一速度范围v1中,具有以下的作用。即,在电动马达30(动力单元p)中,设定为向在使电动车辆1向前方行驶时使后轮4a、4b旋转的方向(以下,将其设为第一旋转方向r1)赋予转矩t1。该转
矩t1设定为消除动力单元p中的驱动系统的各齿轮等彼此的齿隙并且不使电动车辆1的行驶速度增加(不加速)的程度。转矩t1比动力单元p的动力传递路径的齿隙消除(进行消隙)最小限度的转矩tmin大。由此,在该第一速度范围v1中,在乘员使油门把手110的开度增加时,能够抑制在驱动系统中由于齿轮彼此碰撞而产生的冲击。
73.另外,在映射信息im0中,在与第一速度范围v1相比旋转轴45的转速成为高速侧的第二速度范围v2中,具有以下的作用。即,通过电动马达30(动力单元p)将与第一旋转方向r1相反方向的第二旋转方向r2的转矩(反向转矩)t2向后轮4a、4b赋予。例如,在映射信息im0中,在第二速度范围v2的至少一部分中包括通过电动马达30(动力单元p)以恒定的转矩值赋予转矩t2的范围。
74.在第二速度范围v2中,油门把手110的开度为全闭的状态例如是为了在行驶过程中进行减速而使油门把手110为全闭状态的情况。在这样的状态下,通过电动马达30产生使电动车辆1减速的方向(第二旋转方向r2)的转矩。因此,能够抑制电动车辆1的制动负载。另外,在该状态下,使电动车辆1减速的方向的转矩t2由电动马达30赋予。因此,电动车辆1的行驶稳定性提高。此外,由于在第二速度范围v2赋予的转矩t2包括一定的范围,因此能够抑制转矩t2对电动车辆1的行驶造成的影响。因此,难以给乘员带来不适感。
75.另外,在映射信息im0中,设定在第一速度范围v1与第二速度范围v2之间的第三速度范围v3如以下那样设定。即,第三速度范围v3以使通过电动马达30(动力单元p)向后轮4a、4b赋予的转矩t3连续地变化的方式设定。
76.对在油门把手110的开度仍为全闭状态的情况下车速从第二速度范围v2向第一速度范围v1变化时、即减速时进行说明。此时,通过电动马达30产生的转矩不会阶段性地变化,乘员难以感觉到转矩t3的变动。
77.另外,在映射信息im0中,在比第一速度范围v1靠低速侧的位置设定极低速的第四速度范围v4。在映射信息im0中,在电动车辆1的行驶速度处于第四速度范围v4时,如以下那样设定。即,设定为通过电动马达30(动力单元p)将比第一速度范围v1的转矩t1小的转矩t4向后轮4a、4b赋予。该第四速度范围v4是包括电动车辆1的停止状态的极低速区域。在电动车辆1的停止状态(行驶速度为0、即完全停止的状态)下,转矩t4例如设定为0。
78.在这样的第四速度范围v4中,在电动车辆1处于更低速的状态时,乘员更难以感觉到通过电动马达30赋予的转矩t4。而且,在电动车辆1的停止时等极低速的状态下,例如能够抑制将货物装载于电动车辆1或者乘员在电动车辆1上向前方移动时等的影响。即,在电动车辆1的停止时等,能够抑制由于向电动车辆1施加的外力的影响等而电动马达30意外地赋予转矩,电动车辆1开始移动的情况。
79.在此,在第四速度范围v4中,在电动车辆1的停止状态下,也可以设定在比第一速度范围v1的转矩t1大的转矩t0。这是因为,例如在电动车辆1的起动时为了进行动力单元p的消隙,需要比电动车辆1减速而停止时的消隙大的转矩。
80.另外,在映射信息im0中,在设定在第一速度范围v1与第四速度范围v4之间的第五速度范围v5中,如以下那样设定。即,在第五速度范围v5中,设定为使通过电动马达30(动力单元p)向后轮4a、4b赋予的转矩t5连续地变化。
81.在这样的第五速度范围v5中,在保持油门把手110的开度为全闭状态而车速从第一速度范围v1向第四速度范围v4变化时、即减速时,具有以下的作用。即,能够抑制电动车
辆1产生加速感的情况。而且,乘员难以感觉到通过电动马达30赋予的转矩t5的变动。
82.如以上说明的那样,在实施方式的驱动控制装置120及电动车辆1中,控制部124在油门把手110的开度为全闭状态的情况下进行以下的控制。即,在电动车辆1的行驶速度处于预先设定的第一速度范围v1时,通过电动马达30将以下的转矩t1向后轮4a、4b赋予。转矩t1是使电动车辆1向前方行进时的第一旋转方向r1的转矩。而且,在电动车辆1的行驶速度处于设定在比第一速度范围v1靠高速侧的第二速度范围v2时,通过电动马达30将以下的转矩t2向后轮4a、4b赋予。转矩t2是与第一旋转方向r1相反方向的第二旋转方向r2的转矩。
83.根据该结构,在油门把手110的开度为全闭状态且电动车辆1的行驶速度为第一速度范围v1的情况下,进行以下的控制。即,通过电动马达30,将使电动车辆1向前方行进时的第一旋转方向r1的转矩t1向后轮4a、4b赋予。由此,在将油门把手110从全闭状态打开时,驱动系统的齿隙被消除。因此,能够抑制在使电动车辆1加速时产生的冲击。
84.另外,在油门把手110的开度为全闭状态且电动车辆1的行驶速度处于比第一速度范围v1靠高速侧的第二速度范围v2时,进行以下的控制。即,在电动车辆1的行驶中使油门把手110成为全闭状态时,进行以下的控制。即,通过动力单元p,将与使电动车辆1向前方行进时的第一旋转方向r1相反方向的第二旋转方向r2的转矩(反向转矩)t2向后轮4a、4b赋予。在该状态下,由于未通过电动马达30赋予对电动车辆1进行加速的方向的转矩,因此能够抑制因电动马达30的驱动力而产生空走感。此外,在该状态下,使电动车辆1减速的方向的转矩t2由电动马达30赋予,因此在抑制了电动车辆1的制动负载的基础上提高行驶稳定性。其结果是,能够以更少的不适感来操纵由电动马达30驱动的电动车辆1。
85.另外,控制部124在低速侧的第一速度范围v1中,通过电动马达30以恒定的转矩值向后轮4a、4b赋予转矩t1。由此,给电动车辆1的低速行驶造成的影响恒定,乘员难以感觉到由电动马达30赋予的转矩t1。因此,能够更难以给乘员带来不适感。
86.另外,车速传感器122基于由电动马达30驱动的旋转轴45的旋转速度,检测电动车辆1的行驶速度。由此,能够利用更简易的手段直接检测车速。
87.另外,控制部124在设定在第一速度范围v1与第二速度范围v2之间的第三速度范围v3中,使通过电动马达30向后轮4a、4b赋予的转矩t3连续地变化。由此,在油门把手110的开度仍为全闭状态的情况下车速从第二速度范围v2变化为第一速度范围v1时、即电动车辆1的减速时,能够抑制加速感的产生。而且,乘员难以感觉到通过电动马达30赋予的转矩t3的变动。因此,能够更难以给乘员带来不适感。
88.另外,控制部124在电动车辆1的行驶速度处于设定在比第一速度范围v1靠低速侧的第四速度范围v4时,进行以下的控制。即,通过电动马达30,向第一旋转方向r1将比第一速度范围v1小的转矩t4向后轮4a、4b赋予。由此,在电动车辆1为更低速的状态时,乘员更难以感觉到由电动马达30赋予的转矩t4。而且,能够抑制给电动车辆1的极低速行驶造成的影响。
89.另外,第四速度范围v4包括电动车辆1的停止状态,在电动车辆1的停止状态下,所述转矩t4为0。由此,能够抑制停止状态的电动车辆1意外地开始移动的情况。即,在电动车辆1克服电动马达30的转矩t4而停止时,例如有时将货物装载于电动车辆1或者乘员上下电动车辆1而向电动车辆1施加外力。此时,电动车辆1有可能因电动马达30的转矩而开始移动。通过在电动车辆1的停止状态下从电动马达30赋予的转矩成为零,由此能够消除这样的
担心。
90.另一方面,如果电动车辆1具备驻车制动器,则在电动车辆1的停止状态下也能够赋予比第一速度范围v1大的转矩t0。由此,能够可靠地进行动力单元p的消隙。即,例如在电动车辆1的起动时为了进行动力单元p的消隙,需要比电动车辆1从行驶状态减速而停止时的消隙大的转矩。即使在这样的情况下,也能够可靠地进行动力单元p的消隙。
91.另外,控制部124在设定在第一速度范围v1与第四速度范围v4之间的第五速度范围v5中,使通过电动马达30向后轮4a、4b赋予的转矩t5连续地变化。由此,在油门把手110的开度仍为全闭状态的情况下车速从第一速度范围v1向第四速度范围v4变化时、即电动车辆1向极低速的转移时,具有以下的作用。即,能够抑制在电动车辆1产生加速感的情况。而且,乘员难以感觉到通过电动马达30赋予的转矩t5的变动。因此,能够更难以给乘员带来不适感。
92.需要说明的是,本发明并不现定于参照附图说明的上述各实施方式,在其技术范围内可考虑各种变形例。
93.例如,在上述实施方式中,电动车辆1仅通过作为原动机的电动马达30的驱动力来行驶,但是并不限定于此。电动车辆只要使用电动马达30即可,例如可以是并用发动机的驱动力和电动马达30的驱动力的混合动力式等。
94.另外,在上述实施方式中,设为具备电动马达30作为动力单元p的原动机的结构,但是原动机并不限定于电动马达30,也可以是发动机(内燃机)。而且,动力单元p例如可以包括离合器致动器、辅助马达(acg)等。在动力单元p采用由电动马达或液压等驱动的离合器致动器的情况下,可以如以下那样控制。即,根据油门开度通过离合器致动器使离合器动作,由此能够控制向驱动轮赋予的正转方向及反转方向的转矩。
95.另外,电动车辆1为能够使相互分体的前后车身左右摆动(侧倾移动)的摆动式车辆,但是并不限定于此,也可以应用于前后车身一体的电动车辆。而且,并不限定于应用于前一轮且后二轮的三轮车辆,也可以应用于机动二轮车(包括带有原动机的自行车及小型摩托车型车辆)、前二轮且后一轮的三轮车辆、以及四轮的车辆。
96.此外,电动车辆1并不限定于乘员跨骑座椅7的所谓跨骑型的车辆,也可以是就座于具有靠背的座椅的车辆。
97.并且,上述实施方式中的结构是本发明的一例,在不脱离本发明的主旨的范围内能够进行各种变更。
98.符号说明
99.1电动车辆(车辆)
100.4a、4b后轮(驱动轮)
101.30电动马达(原动机)
102.45旋转轴
103.110油门把手(油门)
104.120 驱动控制装置
105.121 油门开度传感器
106.122 车速传感器
107.123 映射存储部
108.124 控制部
109.im、im0映射信息
110.p 动力单元
111.r1 第一旋转方向
112.r2 第二旋转方向
113.t1、t2、t3、t4、t5转矩
114.v1 第一速度范围
115.v2 第二速度范围
116.v3 第三速度范围
117.v4 第四速度范围
118.v5 第五速度范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。