1.本公开涉及运输的技术领域。具体地,本公开涉及公共运输系统,该公共运输系统使用户能够在无需更换车辆的情况下实现门到门旅行。
背景技术:
2.下文中的背景信息与本公开相关,但其不一定是现有技术。普通人每天在城市交通中花费的时间为1小时至1.5小时。用于公共汽车和列车等公共运输的车辆的重量相对于乘客重量的比非常大。这促使由于车辆的自重而造成的能量浪费。在地铁或列车的情况下,通勤者经常需要在地铁/列车的起始点/目的地与车站之间换车。通常,由于高峰时段的交通拥堵,平均行驶速度非常低。地铁/列车在沿线的中间车站处的多次强制停靠进一步增加了旅程的持续时间。
3.常规运输方式所需的基础设施需要坚固且耐用。为了解决交通拥堵问题,已经建造了天桥、高架和/或地下地铁线路。道路上的天桥需要承受重载。此外,由于可用空间稀缺,天桥的建造成本高昂且通常复杂。随着经济的发展,个人的需求也在变化。普通人需要隐私、讨厌换车(例如,从一条线路到另一条线路的列车换乘)、更喜欢不间断的旅程、寻求门到门的运输服务并且还要求提高安全性。同时,如果运输系统更经济,则更容易为大众所接受。
4.虽然自动或无人驾驶汽车以及prt(个人快速交通)是最热门的研究和开发领域之一,但是该技术需要一段时间才能成熟,并且因此,此类车辆不太可能在不久的将来使用。自动prt系统的另一问题与动态自动控制有关,这种动态自动控制需要降低系统容量的车头时距。索道、缆车相关的运输系统存在容量和速度问题。hyperloop是“第五种运输方式”,其已经设计成具有极快的行驶速度。由于频繁加速和减速的高能量需求,城市内所需的停车次数和频率使得hyperloop不适用于城市内运输。
5.因此,需要一种减轻与现有技术相关的问题的运输系统。
6.发明目的
7.本发明的目的是提供一种提供门到门服务的运输系统;
8.本发明的另一目的是提供一种快速、紧凑、节能、可靠、稳妥且安全的大容量运输系统。
技术实现要素:
9.本公开的各方面涉及一种运输系统,该运输系统基于多个吊舱,所述多个吊舱没有任何原动机并且构造成通过具有柔性驱动器的主轨道移动,柔性驱动器用以与吊舱接合并且使吊舱沿着主轨道移动。吊舱还可以由最后一英里车辆运载,以用于在通勤者的起始点与目的地之间提供无缝连接,而无需从一种运输工具到其他运输工具的任何改变。运输系统包括转运车站,该转运车站具有转向带、加速器/减速器轨道和最后一英里装卸区,以用于在轨道与最后一英里车辆之间转运吊舱。
10.在一方面中,所公开的运输系统包括多个主轨道,主轨道中的每个主轨道具有沿着主轨道的长度布置的多个环形柔性驱动器,所述多个环形柔性驱动器中的每个环形柔性驱动器具有位于所述多个环形柔性驱动器的上表面上的多个接合装置。该系统还包括多个吊舱,所述多个吊舱构造成接合至柔性驱动器的接合装置,以沿着主轨道的长度被推进。
11.在一方面中,接合装置是设置在柔性驱动器的上表面上的摩擦材料。所述多个吊舱包括位于吊舱的底表面上的纵向定向的通道,该通道定尺寸成使得对应的柔性驱动器与通道接合以在通道与摩擦材料之间产生摩擦力来用作使吊舱与柔性驱动器一起移动的牵引力。
12.在实施方式中,运输系统还可以包括:至少一个转向带,该至少一个转向带用以将吊舱从车站引导至对应的主轨道,或者将吊舱从主轨道转向至车站;以及至少一个加速/减速路径,该至少一个加速/减速路径用以使吊舱从车站加速并且以与转向带的速度同步的速度将加速的吊舱运送至转向带,或者在吊舱到达车站时使从转向带接收的吊舱减速。
13.在实施方式中,运输系统还可以包括:至少一个最后一英里车辆,该至少一个最后一英里车辆构造成运载所述多个吊舱中的至少一个吊舱并且与吊舱一起从通勤者的起始点移动或者一起移动至通勤者的目的地;以及至少一个转向区块,该至少一个转向区块位于车站处,以使吊舱在所述至少一个最后一英里车辆与所述至少一个加速/减速路径之间转移。
14.在实施方式中,运输系统可以包括控制系统,控制系统具有控制单元以基于来自与所述多个吊舱中的每个吊舱一起构造的传感器的信号来控制主轨道、所述至少一个转向带、所述至少一个加速/减速路径、最后一英里装卸区块中的每一者,以使吊舱从通勤者的起始点移动至对应的目的地。
15.在实施方式中,运输系统可以包括设置在主轨道的柔性驱动器之间以及转向轨道与对应的主轨道之间的多个同步器。
16.在实施方式中,主轨道可以包括至少一个固定条带,所述至少一个固定条带沿着主轨道的长度平行于所述多个柔性驱动器定位。此外,吊舱可以具有轮,轮构造成搁置在所述至少一个固定条带上并承载吊舱的重量的至少一部分。
17.在实施方式中,轮可以与吊舱构造成使得轮的下端部定位成高于吊舱的底表面,以允许吊舱的底表面支承在所述至少一个转向带和所述至少一个转向区块上。
18.在实施方式中,加速/减速路径可以具有一系列轮,所述一系列轮构造成与吊舱的通道接合。这些轮可以在加速/减速路径作为加速路径使用时以逐渐增加的速度旋转,或者在加速/减速路径作为减速路径使用时以逐渐减小的速度旋转。轮中的每个轮可以通过增加或减小相邻的轮的速度的齿轮或带机构联接至相邻的轮。
19.在实施方式中,转向区块和所述至少一个最后一英里车辆上的运载区域中的每一者可以具有移动轴辊的阵列。移动轴辊的旋转轴能够旋转以在从最后一英里车辆装载和卸载吊舱期间使移动轴辊定向成用于实现吊舱的所需的运动方向。
20.在实施方式中,转向带可以包括沿着与主轨道的长度大致对准的方向移动的环形输送机以及设置在环形输送机上的多个辊。辊中的至少一些辊构造成选择性地沿着垂直于环形输送机的运动方向的轴线旋转,以使吊舱沿横向于环形输送机的运动方向的方向移动。
21.在实施方式中,所述多个辊可以通过专用马达旋转,并且辊的马达可以操作性地联接至控制系统。控制系统可以配置成基于来自所述多个吊舱中的一个吊舱的信号来识别吊舱下方的辊并且选择性地致动对应的马达以使吊舱沿横向方向移动从而将吊舱与主轨道合并或者使吊舱从主轨道转向,或者通过不致动对应的马达而使吊舱沿主轨道的运动方向前进。
22.在实施方式中,所述多个辊中的至少一些辊可以是移动轴辊,使得移动轴辊的旋转轴可以选择性地旋转以将移动轴辊定向成实现吊舱的所需的运动方向。
23.本发明主题的各种目的、特征、方面和优点将从以下优选实施方式的详细描述以及附图中变得更加明显,在附图中,相同的附图标记表示相同的部件。
附图说明
24.附图被包括以提供对本公开的进一步理解,并且附图被并入本说明书中并构成本说明书的一部分。附图图示了本公开的示例性实施方式并且与描述一起用于解释本公开的原理。
25.图1a图示了根据本公开的实施方式的公开的运输系统的示例性系统图。
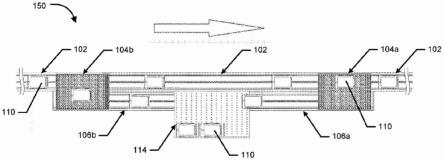
26.图1b图示了根据本公开的实施方式的公开的运输系统的车站的示意图。
27.图2a图示了根据本公开的实施方式的吊舱的示例性立体图。
28.图2b图示了根据本公开的实施方式的吊舱的示例性前视图。
29.图3a图示了根据本公开的实施方式的主轨道的示例性立体剖视图。
30.图3b图示了根据本公开的实施方式的图3a的主轨道的多个柔性驱动器的示例性布置。
31.图3c图示了根据本公开的实施方式的转向带的示例性立体图。
32.图3d图示了根据本公开的实施方式的加速器/减速器轨道的示例性立体剖视图。
33.图4a和图4b分别图示了根据本公开的实施方式的没有吊舱和具有吊舱的最后一英里车辆的示例性立体图。
34.图5图示了根据本公开的实施方式的具有最后一英里装卸区和停止区的车站的示例性俯视图。
35.图6图示了根据本公开的实施方式的公开的运输系统的主轨道的示例性转弯区块。
36.图7a图示了根据本公开的实施方式的移动轨道故障的示例性情况。
37.图7b图示了根据本公开的实施方式的配置成用于处理任何类型的故障的运输系统的示例性构造。
具体实施方式
38.以下是对附图中描绘的本公开的实施方式的详细描述。实施方式详细成使得能清楚地传达本公开。然而,所提供的细节的量并不意在限制实施方式的预期变型;相反,本发明将覆盖落入由所附权利要求限定的本公开的精神和范围内的所有修改、等同项和替代项。
39.本文所解释的实施方式涉及一种运输系统,该运输系统基于多个吊舱,所述多个
吊舱没有任何原动机并且构造成通过具有柔性驱动器的主轨道来移动,所述柔性驱动器用以与吊舱接合并且使吊舱沿着主轨道移动。吊舱还可以由最后一英里车辆运载,以在通勤者的起始点与目的地之间提供无缝连接,而不需要任何改变。运输系统包括转运车站,该转运车站具有转向带、加速器/减速器轨道和最后一英里装卸区,以在轨道与最后一英里车辆之间转运吊舱。
40.现在参照1a至图7b,其中公开了所公开的运输系统的不同方面,运输系统100包括:多个主轨道102(也称为移动轨道或简称为轨道,并且所有这些术语在下文中可以互换使用),所述多个主轨道102具有沿着主轨道102的长度布置的多个环形柔性驱动器302(参照图3a);多个吊舱110,所述多个吊舱构造成接合至柔性驱动器302以沿着主轨道102的长度被推进并移动。因此,吊舱110的特征在于在没有任何原动机比如ic发动机或马达的情况下沿着主轨道102移动,该主轨道102通过柔性驱动器302向吊舱110提供所需的牵引力。
41.在一方面中,柔性驱动器的接合装置可以是设置在柔性驱动器302的面向外的表面上的摩擦材料304(参照图3a)。吊舱110可以包括位于吊舱110的底表面上的纵向定向的通道206(参照图2a和图2b)。通道206可以定尺寸成使得对应的柔性驱动器302可以与通道206接合以在通道206与摩擦材料304之间产生摩擦力来用作使吊舱110与柔性驱动器302一起移动的牵引力。
42.运输系统100还可以包括:至少一个转向带104,该至少一个转向带104用以将吊舱110合并到主轨道102或将吊舱110从主轨道102转向;以及至少一个加速/减速路径106,该至少一个加速/减速路径106用以使吊舱110加速并将加速后的吊舱以与转向带104的速度同步的速度运送至转向带104,或者用以使从转向带104接收的吊舱110减速。在一方面中,转向带104和加速/减速路径106还构造成在吊舱110本身没有任何牵引力的情况下使吊舱110在所需方向上移动。
43.在实施方式中,如图1b所示,转向带104可以通过在对转向带104的机械构造没有任何重大改变的情况下适合地构造转向带104来构造成用于分离带104b(也称为分离侧线,并且这两个术语在下文中可以互换使用)或合并带104a(也称为合并侧线,并且这两个术语在下文中可以互换使用)的功能。类似地,加速/减速路径106可以在对加速/减速路径106的机械构造没有任何重大改变的情况下构造成用于加速器轨道106a(也称为加速路径,并且这两个术语在下文中可以互换使用)或减速器轨道106b(也称为减速路径,并且这两个术语在下文中可以互换使用)的功能。
44.在实施方式中,运输系统100还可以包括用以向其用户提供从通勤者的起始点(也称为始发地/发源地,并且所述术语在下文中可以互换使用)至通勤者的目的地(也称为目的点,并且所述术语在下文中可以互换使用)的最后一英里连接的装置。该装置包括至少一个最后一英里连接车辆400(参照图4a和图4b,该至少一个最后一英里连接车辆400能够运载一个或更多个吊舱110以在车站150(参照图5)与目的地或起始点之间运输运输系统100的用户(也称为通勤者)。在一方面中,用户不需要从最后一英里车辆400下来而登上吊舱110,或者用户不需要从吊舱110下来而登上最后一英里车辆400,而是替代性地,最后一英里车辆400构造成运载用户坐在其中的吊舱110本身。因此,所提出的运输系统100提供了一种用于在起始点和目的地之间关于通勤者无缝行驶的装置,由此提供了门对门连接。
45.在图1b所示的实施方式中,其中公开了所提出的运输系统的车站150的构造,可以
在预定位置处的轨道102的网络上提供多个车站、比如车站150。车站150可以构造成提供以下各者中的任何一者或其组合的功能:从通勤者的相应起始点接收进入的吊舱110;从主轨道102卸下吊舱110以继续前往用户的相应目的地;以及允许通勤者在车站150本身处从吊舱下来,而不使用最后一英里车辆400的服务。
46.如图1b所示,车站150可以包括主轨道102,所述主轨道102构造成将吊舱110从其他位置带到车站150并且将吊舱110从车站150运载到其他位置。车站150可以构造成允许在对应的通勤者已经下来之后的吊舱110、或者由最后一英里车辆400接收的进入吊舱并入轨道102上的吊舱流中,并且允许吊舱110从轨道102上的吊舱110流分出,以使通勤者下来或登上最后一英里车辆400。为此,车站150可以包括加速器路径106a和减速器路径106b,加速器路径106a用于使需要与轨道102上的吊舱流合并的吊舱110加速,减速器路径106b用于使从其他位置到达车站150的吊舱110减速。该车站还包括转向带104,比如定位在加速器路径106a于主轨道102之间的合并带104a以及定位在减速器轨道106b与主轨道102之间的分离带104b。
47.如图1b中所示,运输车站100的车站150可以包括位于加速器路径106a与减速器路径106b之间的用于吊舱110的停止区,该停止区可以用于停放到达的吊舱和离开的吊舱。停止区可以是至少一个转向区块114,该转向区块114与转向带104和加速/减速路径106一起以适当的方式构造,以使吊舱110能够定位在车站150处的相应期望位置,对于该期望位置,转向区块114具有使各个吊舱110沿任何期望的方向移动的功能,如将在随后的段落中描述的。
48.在实施方式中,参照图1a,运输系统100还可以包括控制系统160,该控制系统160具有集中控制单元和单独控制单元,以基于来自构造有吊舱110中的每个吊舱的传感器的信号控制主轨道102、转向带104、加速/减速路径106、转向区块114中的每一者。通过控制集合体/部件中的每一者对控制系统160进行的集中控制能够通过适当地致动对应的转向带104、加速/减速路径106、转向区块114而使吊舱110从各个通勤者的起始点移动至对应的目的地。在实施方式中,中央控制可以体现在服务器中,并且可以用于启动、停止、应用紧急制动等。在另一实施方式中,用以控制集合体/部件的单独控制单元可以位于集合体/部件本身中。
49.在实施方式中,除了集中控制之外,所公开的运输系统100的控制系统160还可以包括本地控制系统,该本地控制系统可以通过来自吊舱110的信号基于吊舱110与诸如主轨道102、转向带104、加速/减速路径106、转向区块114之类的其他集合体/部件之间的直接通信来工作。主轨道102、转向带104、加速/减速路径106、转向区块114中的每一者的控制单元可以基于信号采取行动以使吊舱110沿着通向相应目的地的期望路线移动。
50.在实施方式中,主轨道102的网络可以包括具有不同轨道102速度的区域。在实施方式中,第一区域可以具有30km/hr的速度,第二区域可以具有60km/hr的速度,第三区域可以具有90km/hr的速度,以及第四区域可以具有120km/hr的速度。
51.图2a和图2b图示了吊舱110的立体图和正视图。吊舱110是用于容纳一个或更多个用户的非推进式的、被动的轻型机舱。吊舱110构造成支承一个或两个平均成年个体及其所有物的重量,同时最小化机舱的重量。吊舱110适于抵抗施加在其上的各种力而保持稳定,尤其是在加速、减速、加载、横向移位等期间抵抗施加在其上的各种力而保持稳定。吊舱110
还可以包括位于底侧的一个或更多个通道206,该通道206可以与轨道102的柔性驱动器302接合以沿着轨道102被推进。可以在吊舱110中安装特殊装置以为吊舱110中的每个吊舱提供唯一标识并识别吊舱在运输系统100上的位置,控制系统160或不同集合体/部件的控制单元可以使用该吊舱的标识和位置来控制运输系统100上的其他集合体/部件,以使吊舱110在相应的起始点与对应的目的地之间移动。该装置还可以经由扫描系统(选自由二维码、智能卡等构成的组)接收和存储乘客的目的地信息。该装置还可以具有通过控制系统160或直接地将目的地信息传输至其他集合体/部件的能力,例如传输至最后一英里车辆400、停止区中的转向区块114、加速器/减速器路径106、转向带104和主轨道102的能力。
52.在实施方式中,吊舱110可以构造成从吊舱110将在其上移动或支承在其上的车站150和轨道102接收电力,车站150包括转向带104、转向区块114、加速器/减速器路径106和最后一英里车辆400。吊舱110还可以设置有电池,如上所述,该电池可以通过接收的电力进行充电,并且还可以用于向安装在吊舱110内的集中的视听信息和警报装置、乘客的个人装置、换气扇等供电。
53.在实施方式中,吊舱110可以用于诸如救护车吊舱、货物吊舱、货物以及乘客车厢构型之类的变体。此外,吊舱110的前轮202和后轮204可以设置有减震悬架,该减震悬架用于促使分离侧线104b/合并侧线104a与主轨道102之间的平滑过渡。
54.图3a示出了主轨道102的立体剖切图,其示出了主轨道102的推进机构。推进机构包括沿着轨道102的长度布置的多个柔性驱动器302。每个柔性驱动器302可以基于包括连接的链接部的环形柔性元件,以提供所需的柔性,该连接的链接部比如以链的方式。柔性驱动器302可以包括沿着柔性驱动器302的长度的多个接合装置。在一方面,接合装置可以是设置在柔性驱动器302的链接部的面向外的表面上的摩擦材料件304。摩擦材料件304可以定形状成使得它们与位于吊舱110的底表面处的通道206接合,以在通道206与摩擦材料件304之间产生摩擦力,以充当牵引力以使吊舱与柔性驱动器302一起移动。
55.柔性驱动器302可以围绕在多个惰辊312卷绕,并且可以由马达308通过联接至马达308的至少一个辊来驱动,如图3a中所示。此外,在柔性驱动器302的松弛侧上,可以设置至少一个张紧器带槽辊。主轨道102还可以具有至少一个固定条带310,固定条带310位于平行于其延伸的柔性驱动器302的任一侧或两侧。如图3b中所示,可以在相邻的柔性驱动器302的驱动装置之间设置同步器机构306,以确保柔性驱动器302以相同的线速度移动,以用于吊舱110从一个柔性驱动器302至下一个柔性驱动器302的无抖动过渡。同步器机构306也可以用于补偿由于负载条件的变化而导致的柔性元件驱动器的速度上的任何偏差。在实施方式中,同步器可以包括离合器机构,该离合器机构能够接收来自集合体/部件中的任一者的控制单元或来自控制系统160的致动命令,以选择性地允许相邻的柔性驱动器302以不同的速度或相同的速度移动。在另一实施方式中,同步器的功能可以通过监测各个柔性驱动器302的rpm并控制相关联的马达308的速度来数字化地实现。
56.在实施方式中,吊舱110的轮202、204和轨道102的至少一个固定条带310可以构造成使得轮202、204和至少一个固定条带310中的每一者的最低点定位成高于吊舱110的底表面。这允许吊舱110的底表面与运输系统100的其他集合体接触,即与转向区块114及转向带104接触,而轮202和204不会与相应的集合体发生干扰,但是当吊舱110沿着主轨道102移动时允许轮202、204在固定条带310上滚动。在另一实施方式中,轮202和204可以与吊舱110一
起构造成使得固定条带310通过轮202和204仅承载吊舱110的部分负荷,剩余重量由柔性驱动器302承载,这足以提供足够的摩擦力来牵引吊舱110。因此,驱动移动轨道102的马达的整体额定负荷和所需容量以及由此移动元件的重量会减少。
57.图3c示出了转向带104的立体图,转向带104具有移动的环形输送机352,输送机352具有多个辊354的阵列。多个辊354中的每个辊可以构造成沿着与环形输送机354的运动方向对准的轴线旋转,以使吊舱110在横向于环形输送机352的运动方向的方向上移动。在替代性实施方式中,多个辊354中的每个辊可以是旋转轴辊,使得辊的旋转轴可以围绕竖向轴线旋转,以将旋转轴定向在不同方向上,包括与输送机352的运动方向对准的方向,使得辊354能够使搁置在其上的吊舱110在横向于环形输送机352的运动方向的方向上移动。辊354的可移动轴构型可以使辊354的旋转轴垂直于输送机352的运动方向定向,并且因此在一个方向或另一个方向上旋转,以提高或降低支承在其上的吊舱110的速度。在实施方式中,当辊具有可移动轴构型时,辊的外部筒形表面可以具有凸形形状,以通过在吊舱110的底表面与辊354之间提供较小的接触面积来使得辊的轴能够旋转而没有过度的摩擦和磨损。
58.在一个实施方式中,辊354可以通过专用马达旋转,并且多个辊354的马达可以操作性地联接至控制系统160。控制系统160可以构造成基于来自吊舱110的信号确定吊舱110的位置并且识别吊舱110下方的辊354,并且选择性地致动对应的马达以使吊舱110在横向方向上移动,从而将通过加速器轨道106a接纳的吊舱110与主轨道10合并,或者将由主轨道102接纳的吊舱110转向到减速轨道106b。辊354也可以通过不致动对应的马达而保持静止,以允许吊舱110在主轨道102的运动方向上前进。
59.在一个实施方式中,用于使辊354旋转的专用马达可以并入辊本身内、即辊354可以由马达本身制成,以减少重量和空间消耗。例如,马达的外壳可以构造为马达的转子,并且进一步构造成提供辊的筒形表面的功能。同样,辊402(参照图4)和辊502(参照图5)也可以构造成具有专用马达,以实现通用性和减少多样性。
60.在一个实施方式中,辊354可以通过专用马达旋转,并且多个辊354的马达可以基于来自吊舱110的作为吊舱110的特定位置的信号被致动,并且识别吊舱110下方的辊354,并且选择性地致动对应的马达,以使吊舱110沿横向方向移动,从而将通过加速器轨道106a接纳的吊舱110与主轨道102合并,或者将从主轨道102接纳的吊舱110转向到减速轨道106b。辊354也可以通过不致动对应的马达而保持静止,以允许吊舱110在主轨道102的运动方向上前进。
61.在另一实施方式中,辊354可以仅基于来自吊舱110的信号被致动,这将使系统快速运行并减少控制系统160的通信负荷,并且辊354可以用作本地控制而不受控制系统160的干扰。
62.在实施方式中,转向带104可以具有第一组辊354和第二组辊354,第一组辊354可以是供有动力的,第二组辊354、即其余的辊354可以是非动力辊。转向带104可以构造成以与主轨道102的速度相同的速度旋转,比如通过设置有诸如同步器机构306之类的同步器。
63.在又一实施方式中,转向带104可以具有靴状分拣器机构,而不是辊354。
64.参照图3d,加速器/减速器路径106构造成将吊舱110的速度从零提高到预定速度或者从预定速度降低到零,预定速度等于主轨道102的速度。在另一实施方式中,加速器路
径106a构造成将吊舱110的速度从第一预定速度提高到第二预定速度,并且减速器路径106b构造成将吊舱110的速度从第二预定速度变到第一预定速度。在实施方式中,加速器/减速器路径106包括一系列轮356,一系列轮356根据作为加速器路径106a或减速器路径106b的应用以逐渐增加或降低的速度旋转。一系列轮356中的每个轮可以通过齿轮或带机构358联接至相邻的轮356,该齿轮或带机构358降低或增加相邻的轮356的速度。加速器/减速器路径106可以包括驱动马达。轮356可以构造成与吊舱110的通道206接合,以在吊舱110的加速或减速期间在吊舱110与加速器/减速器路径106之间传递力。在实施方式中,轮356可以包括设置在轮356的面向外的表面上的摩擦材料件,并且可以定形状成使得轮356与位于吊舱110的底表面处的通道206接合以产生摩擦力。在另一实施方式中,加速器/减速器路径106还可以包括类似于固定条带310的至少一个固定条带,所述至少一个固定条带位于与其平行地延伸的一系列轮356的任一侧或两侧,并且吊舱110的轮202和204可以搁置在固定条带上以部分支承吊舱110。
65.在实施方式中,减速器路径106b可以为再生减速器,该再生减速器可以从吊舱110中回收动能并且将该动能储存以备后用。
66.如图4a和图4b中所图示的,本公开的最后一英里车辆400可以为人为驾驶车辆,该人为驾驶车辆构造成将多个运吊舱110中的一个或更多个吊舱与通勤者一起从起始点运输至车站150,以通过转向区块114与主轨道102上的吊舱110流合并,或者在吊舱110已经从主轨道102分拣并接纳后,将吊舱110从车站150运载至目的地。最后一英里车辆400上的运载区域可以包含多个可移动轴辊402的阵列,以使吊舱110能够在任何方向、比如横向于最后一英里车辆400的纵向方向的方向上移动,以用于将吊舱110从最后一英里车辆400的一侧装载和卸载,或者在平行于最后一英里车辆400的纵向方向的方向上移动,以用于将吊舱110从最后一英里车辆400的后侧装载和卸载。应当理解的是,辊402、辊354和辊502(参照图5)在通用性和减少多样性方面可以是相同的。
67.在实施方式中,可以为每个最后一英里车辆400分配驾驶员。在另一实施方式中,最后一英里车辆400可以是构造成在自动驾驶模式下移动的自动车辆,该自动驾驶模式使用人工智能来启用。最后一英里车辆400可以具有预定的速度限制,例如25km/hr。
68.图5示出了车站150的其他详细信息,其中,车站150可以具有最后一英里装卸区112和停止区108,装卸区112用于使用吊舱110装载和卸载最后一英里车辆400,停止区108具有平台504以使通勤者——该通勤者不希望使用用于最后一英里连接的最后一英里车辆400——能够离开或登上吊舱110。转向区块114可以具有移动轴辊502,该移动轴辊502的旋转轴可以被控制成使旋转轴对准以实现所需的吊舱110的运动方向,比如以使吊舱110从减速器路径106b朝向最后一英里装卸区112移动或移动至停止区108,以及使吊舱110从最后一英里装卸区112或停止区108朝向加速器路径106a移动。同样,就像在转向带104的辊354的情况下一样,可移动轴辊502中的每个可移动轴辊502可以操作性地联接至控制系统160,或者直接基于来自吊舱110的信号,以用于基于搁置在辊502上的已识别吊舱110和已识别吊舱110的目的地进行辊502的旋转轴的选择性旋转以及使辊502围绕其轴线旋转。
69.在图6中图示了移动轨道102的转弯区块11。转弯区块11可以包括位于弯曲部的起始处的减速器路径106b和位于转弯区块11的弯曲部的端部处的加速器路径106a。在实施方式中,其中,吊舱沿着直线移动轨道102的速度为60kmph,减速器路径106b构造成使进入转
弯区块11的吊舱减速,例如从60kmph减速至30kmph,并且加速器路径106a可以构造成使离开转弯区块11的吊舱110加速,例如从30kmph加速至60kmph。转弯区块11还设置有至少一个转弯区块部段11a。此外,在实施方式中,转弯区块11具有多个平行的转弯区块部段11a、11b等,其中,分离侧线104b和合并侧线104a分别在转弯区块11的弯曲部的入口和出口处。通过设置多个转弯区块部段,可以确保的是在转弯期间降低沿着转弯部的行进速度以提供安全性的同时确保了相同的整体吊舱流速。
70.借助于图7a和图7b图示了任何轨道的任何故障的示例性情况,其中,车站n1、n2、n3、
……
n6是正常车站,并且x是已经发生不希望的意外情况的点、比如发生碰撞或损坏/故障的柔性元件驱动器的点。车站s1是具有更高容量和两个特殊的主轨道和减速器轨道md1、md2以及两个转向带dp1、dp2的特殊车站的示例。车站s2是具有更高容量和一个特殊的主轨道和加速器轨道ma1的特殊车站的示例。在紧急事件时,第一主轨道和减速器轨道md1构造成具有充当减速器路径(例如,60km/hr至45km/hr)的能力,并且在正常情况下,第一主轨道和减速器轨道md1构造成充当主轨道。在紧急情况时,第二主轨道和减速器轨道md2构造成具有充当减速器路径(例如,60km/hr至45km/hr)的能力,并且在正常情况下,第二主轨道和减速器轨道md2将充当主轨道。用于提供分离的目的是在到达的吊舱之间有预定的间隙。在紧急事件时,主轨道和加速器轨道ma1构造成具有充当加速器路径(例如,45km/hr 25至60km/hr)的能力,并且在正常情况下,主轨道和加速器轨道ma1可以充当主轨道。第一转向带dp1构造成分离吊舱,并且第二转向带dp2构造成合并吊舱。
71.在紧急事件的情况下,在车站s1处,在图7b中所示的“疏散区”(ez)中施加制动。在紧急时刻,分离侧线处的吊舱将安全进入“疏散区”(ez),并且从下一时刻起,其他吊舱将开始分离。
72.在紧急事件的情况下,在车站s2处,在图7b中所示的“疏散区”(ez)中施加制动。在紧急时刻,分离侧线处的吊舱将安全离开“疏散区”(ez),并且从下一时刻起,其他吊舱将开始分离。
73.替代性地,动力辊(在附图中未示出)可以安装在吊舱110上。安装的动力辊能够使吊舱110沿任何方向移动。这些辊可以被数字化地控制。取代为合并侧线104a和分离侧线104b提供动力辊,可以在合并侧线104a和分离侧线104b处设置具有高摩擦系数的平带。吊舱110的动力辊可以在分离/合并的同时沿所需的方向移动。互换车站150可以具有平带,使得吊舱110自身可以执行侧线运动,其中,吊舱110的侧线运动可以在使用传感器被导引的同时被数字化地控制。此外,吊舱110可以通过使用吊舱110的动力辊转移至最后一英里车辆400。
74.在实施方式中,控制系统160的中央控制件可以在服务器中实施,并且可以包括用于监测功能的监测系统,并且因此,中央控制件在下文中称为“中央控制件和监测服务器”。各种类型的装置可以安装在不同的集合体/部件上,即安装在主轨道102、转向带104、加速器/减速器路径106上,这些装置可以将数据如吊舱110的实时位置、吊舱110的速度、吊舱110的取向、部件运行状况如磨损和撕裂或任何损坏、马达运行状况、制动运行状况、rpm信息、异物、负载条件等发送至“中央控制件和监测服务器”。
75.在实施方式中,从安装在不同集合体/部件上的装置接收的数据可以用于对吊舱110中的每个吊舱110的位置、车站人群管理、空吊舱110至其他车站的重新布线/管理、最后
一英里预订、紧急声明、各种轨道上的吊舱的容量等进行检测。
76.在实施方式中,安装在不同集合体/部件上的装置可以是电气装置、相机、计算机、服务器、传感器或处理单元中的任一者或其组合。这些装置能够通过有线或无线连接以非常低的延迟来传输来自其他装置的数据和接收来自其他装置的数据。
77.在实施方式中,“中央控制件和监测服务器”可以配置成具有对主轨道102的马达、转向带104的辊的专用马达、加速/减速路径106的马达、转向区块114的辊的专用马达进行控制并且在紧急事件时为受影响部分施加制动的能力。
78.在实施方式中,“中央控制件和监测服务器”可以包括能够无线地或有线地控制各种部件的计算机、传感器、电气装置。
79.尽管前面描述了本发明的各种实施方式,但是在不脱离本发明的基本范围的情况下,可以设计本发明的其他的和另外的实施方式。本发明的范围由下面的权利要求确定。本发明不限于所描述的实施方式、版本或示例,这些实施方式、版本或示例被包括在内以使得本领域普通技术人员在与本领域普通技术人员可获得的信息和知识相结合时能够制造和使用本发明。
80.本发明的优点
81.以上在本文中描述的本公开具有几个技术优势,包括但不限于实现提供门到门服务的运输系统;
82.本公开提供了一种快速、紧凑、节能、可靠、稳妥且安全的高容量运输系统。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。