1.本发明涉及卡车配件技术领域,具体是一种卡车尾部可调节导流板。
背景技术:
2.在20世纪末,人们开始关注卡车流场特性,在卡车正常行驶时,受到的阻力主要有气动阻力、滚动阻力、坡度阻力、加速阻力,当汽车车速达到80km/h后,气动阻力占比达到60%以上,且随着速度的继续变大,气动阻力占比会以更快的速度增加。据统计,2021年中国公路货物运输占总货物运输比例达到73.89%,随着中国公路的不断扩展与物流业的迅猛发展,这一比例将会继续增大。因此,减小卡车在行驶过程中尤其是高速行驶时的气动阻力,对于整车燃油经济性与减少污染物的排放的意义重大,并且将会进一步促进公路运输业的发展。
3.卡车尾部通常都有较大的涡流,尾部导流板的安装,将能够在很大程度上对尾部流场进行改善,实现减阻的效果。现有卡车导流板一般是在驾驶室前端与侧位、货箱侧位,很少有安装在货箱尾部,极少数在尾部的导流板只是有固定形状与位置,对变化多端的行车工况不具有通用性。另外,尽可能实现汽车轻量化的同时提高安全性,导流板将具有可伸缩性,在卡车原地停放或超低速行驶时,导流板作用很小甚至无作用,可以将其收回进储放模块里,同时也能起到保护导流罩与其他行人的作用。
技术实现要素:
4.本发明的目的在于提供一种卡车尾部可调节导流板,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种卡车尾部可调节导流板,包括:
7.储放模块,安装在卡车货箱末端;
8.导流板主体,安装在所述储放模块上,所述导流板主体包括滑动连接的一级导流板和二级导流板,用于导流;
9.限位模块,安装在所述导流板主体和储放模块上,用于限制一级导流板和二级导流板在伸出与收回过程中的最大位移距离,防止出现位移过大出现脱落的现象,并且在一级导流板达到极限位置时,由一级导流板或二级导流板的运动带动整体运动;
10.驱动模块,安装在储放模块上,所述驱动模块包括用于驱动导流板主体滑动的一级驱动单元和用于驱动导流板主体旋转的二级驱动单元,用于使导流板主体产生位移并旋转来调整姿态;
11.采集模块:安装在所述导流板主体和驱动模块,用于测量导流板主体的空气流速和姿态,并将采集的信号上传;
12.控制模块,安装在储放模块上,用于接收采集模块传来的信号,并根据信号确定预设的控制信息将控制信息传递到驱动模块。
13.作为本发明的进一步技术方案,所述一级驱动单元包括:
14.成对设置的第二电子气压升降杆,固定安装在所述储放模块上;
15.多连杆,一端通过双头铆钉与第二电子气压升降杆的输出端转动连接,另一端安装有成对设置的滑轮;
16.第一滑轨,固定安装在所述一级导流板一端并与滑轮相配合;
17.第二滑轨,固定安装在所述一级导流板一端并与滑轮相配合。
18.作为本发明的更进一步技术方案,所述滑轮包括:
19.连接杆,固定安装在所述多连杆内,所述连接杆两端均贯穿多连杆并延伸至外部;
20.滚轮,转动安装在所述连接杆两端并与第一滑轨和第二滑轨相配合。
21.作为本发明的再进一步技术方案,所述二级驱动单元包括:
22.第一电子气压升降杆,一端与所述货箱转动连接,另一端与所述储放模块转动连接;
23.铰链,安装在所述储放模块与货箱之间,当第一电子气压升降杆伸缩时驱动储放模块以铰链为中心旋转。
24.作为本发明的再进一步技术方案,所述限位模块包括:
25.多个限位块,分别安装在一级导流板末端、二级导流板两端和储放模块前端。
26.作为本发明的再进一步技术方案,所述限位块由弹性材料制成。
27.作为本发明的再进一步技术方案,所述采集模块包括:
28.流速采集子模块,安装在所述一级导流板和二级导流板上,用于检测一级导流板和二级导流板位置处的空气流速,并传递到控制模块来判断该流速下一级导流板和二级导流板该有的姿态;
29.位移采集子模块,安装在所述第一电子气压升降杆和第二电子气压升降杆上,用于检测第一电子气压升降杆和第二电子气压升降杆的位移,若位移长度与控制模块输出的应有的位移信息不相同,驱动模块将会继续运行,直到第一电子气压升降杆和第二电子气压升降杆的位移达到设定预期。
30.作为本发明的再进一步技术方案,所述控制模块内设有芯片,用于接收采集模块的采集信息、储存预设的导流板姿态信息,通过流速采集子模块的采集信息输出对应的导流板姿态信息到驱动模块,并根据位移采集子模块的采集信息判断导流板主体是否达到预期姿态,若未达到,将继续向驱动模块输出驱动信息。
31.与现有技术相比,本发明的有益效果是:首先通过采集模块测得货箱尾部区域流场流速,将流速信息传输到控制模块,控制模块根据预先输入的信息输出该流速下对应的导流板主体姿态,驱动模块接收控制模块的输出信息,调整导流板主体的姿态来达到减阻的效果,另外采集模块会检测导流板姿态是否达到预期,并把信息反馈至控制模块,若未达到预期,控制模块会再次向驱动模块输出导流板姿态信息来调整导流板姿态,从而实现轻量安全,满足不同行驶条件的减阻导流,更加高效实用。
附图说明
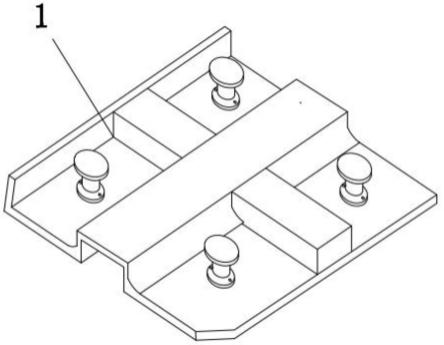
32.图1为本发明的结构示意图;
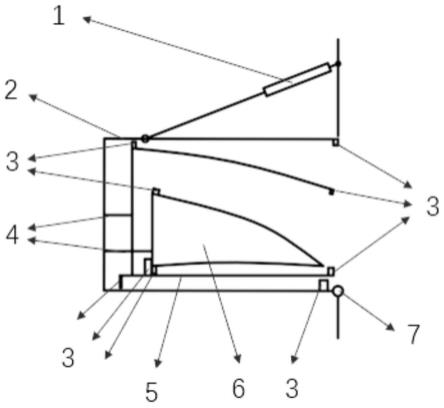
33.图2为本发明导流板本体伸出时的结构示意图;
34.图3为本发明一级导流板伸出到极限时的结构示意图;
35.图4为本发明一级导流板与二级导流板均伸出到极限位置时的结构示意图;
36.图5为本发明一级导流板与二级导流板均伸出到极限位置旋转调整后的结构示意图;
37.图6为本发明一级驱动单元收缩时的结构示意图;
38.图7为本发明一级驱动单元伸展时的结构示意图;
39.图8为本发明多连杆与一级导流板的连接结构示意图;
40.图9为本发明导流板本体部分隐藏时控制模块与储放模块的展示图。
41.图中:1-第一电子气压升降杆、2-储放模块、3-限位块、4-多连杆、5-二级导流板、6-一级导流板、7-铰链、8-第二电子气压升降杆、9-双头铆钉、10-第一滑轨、11-滑轮、12-第二滑轨、13-连接杆、14-滚轮、15-货箱、16-控制模块。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
43.本发明实施例是这样实现的,如图1至图9所示的卡车尾部可调节导流板,包括:
44.储放模块2,安装在卡车货箱15末端;
45.导流板主体,安装在所述储放模块2上,所述导流板主体包括滑动连接的一级导流板6和二级导流板5,用于导流;
46.限位模块,安装在所述导流板主体和储放模块2上,用于限制一级导流板6和二级导流板5在伸出与收回过程中的最大位移距离,防止出现位移过大出现脱落的现象,并且在一级导流板6达到极限位置时,由一级导流板6或二级导流板5的运动带动整体运动;
47.驱动模块,安装在储放模块2上,所述驱动模块包括用于驱动导流板主体滑动的一级驱动单元和用于驱动导流板主体旋转的二级驱动单元,用于使导流板主体产生位移并旋转来调整姿态;
48.采集模块:安装在所述导流板主体和驱动模块,用于测量导流板主体的空气流速和姿态,并将采集的信号上传;
49.控制模块16,安装在储放模块2上,用于接收采集模块传来的信号,并根据信号确定预设的控制信息将控制信息传递到驱动模块。
50.本发明在实际应用时,导流板主体有一级导流板6和二级导流板5,其存放在储放模块2中,储放模块2安装在卡车货的货箱15尾部,占用少量的货箱15空间,如图1所示;如图2所示,该图为导流板在汽车未行驶或超低速下行驶时的状态,一级导流板6与二级导流板5都储放在储放模块2中,同时也能起到保护导流板与其他行人的作用;如图3所示,该图为一级导流板6伸出到极限位置,此时一级导流板6后端与二级导流板5前端的限位模块相贴,阻止一级导流板6的进一步伸出,同时接下来还能起到带动二级导流板5伸出的作用;如图4所示,该图为一级导流板6在多连杆4推动下带动二级导流板5向前伸出到达二级导流板5的极限位置的状态,此时二级导流板5后端与储放装置前端的限位模块相贴,阻止二级导流板5继续向前伸出,同时也再次限制了一级导流板6的向前运动,在收回过程中,二级导流板5先收回,同时通过限位模块带动一级导流板6的收回;如图5所示,该图为一级导流板6与二级
导流板5都达到极限位置后,通过第一电子气压升降杆1的伸缩来使得储放模块2以自己下端为中心旋转,达到调整导流板姿态的效果;如图6所示,多连杆4共12根杆首尾相连,最左端杆分别与第二电子气压升降杆8相连,杆件之间通过双头铆钉9连接,保证连接可靠性的同时,杆件还能以连接处为中心进行旋转,最右端与通过连接杆13与滚轮14相连,左端第二电子气压升降杆8向中间伸长,能够推动多连杆4向右伸出,使得导流板产生位移,向着远离储放模块2的方向移动;如图7所示,第一滑轨10和第二滑轨12固定在一级导流板6后端,滚轮14能够随着多连杆4的运动在滑轨中平行滚动;如图8所示,储放模块2在货箱15尾部,占用部分货箱15空间,控制模块16也位于储放模块2之中,为展示储放装置内部,该图已将导流板、多连杆4机构隐藏。
51.具体的,储放模块2安装在卡车货箱15末端,用于存放导流板主体,以及其他模块如控制模块16、驱动模块等;
52.限位模块安装在导流板主体上,用于限制一级导流板6与二级导流板5在伸出与收回过程中的最大位移距离,防止出现位移过大出现脱落的现象,另外还可以在一级导流板6达到极限位置时,由一级导流板6(二级导流板5)的运动带动二级导流板5(一级导流板6)的运动;
53.采集模块安装在一级导流板6和二级导流板5中部前端以及第一电子气压升降杆1和第二电子气压升降杆8中,前者能够测量空气流速,后者能够测量位移,都能将数据上传到处理器;
54.控制模块16安装在储放模块2中,能够接收传感器传来的信号,并根据信号确定预设的控制信息,并将控制信息传递到驱动模块;
55.驱动模块安装在储放模块2中,分为一级驱动单元和二级驱动单元,能够接收控制模块16传来的信号,驱动导流板主体与储放模块2运动到对应的位置处,一级驱动单元主要由第二电动气压升降杆和多连杆4机构构成,一级驱动单元由第二电动气压升降杆带动多连杆4的伸缩变化,使导流板主体产生位移,二级驱动单元由第一电动气压升降杆带动储放模块2旋转运动,来进一步调整导流板主体的姿态;
56.限位模块安装在一级导流板6末部、二级导流板5前端与末端、储放模块2前端,主要为弹性材质的限位块3,用于限制导流板主体的最大位移,防止导流板主体的脱落;另外,当一级导流板6伸出到达最大位移的位置,还能过够通过限位块3带动二级导流板5的运动,当二级导流板5到达极限位置后,二级导流板5的收回能带动一级导流板6的运动。
57.进一步的,所述导流板主体为铝合金材料,其耐腐蚀性高,防锈性能高,强度高,使用寿命长,且比重小,能够实现轻量化的意义。
58.更进一步的,所述驱动模块的一级驱动单元的具体作用,是通过第二电子气压升降杆8的位移,来带动多连杆4机构产生伸缩运动,来使得导流板产生位移达到调整导流板姿态的目的;所述多连杆4中有12根杆件,能够驱动一级导流板6和二级导流板5实现最大位移;所述多连杆4中,杆件与杆件之间通过双头铆钉9连接,保证杆件能够转动且不脱落;多连杆4与一级导流板6通过滑轮11与第一滑轨10和第二滑轨12相连,滑轮11包括连接杆13和滚轮14,第一滑轨10和第二滑轨12焊接在一级导流板6后端。
59.更进一步的,所述驱动模块的二级驱动模块的具体作用是,通过第一电子气压升降杆1的伸缩运动带动储放装置旋转来调整导流板的姿态。
60.更进一步的,所述采集模块与控制模块16连接,其中主体为传感器,分为流速采集子模块与电子气压升降杆位移采集子模块,分别用于检测导流板主体位置处空气流速以及电子气压升降杆的伸缩位移,并将采集信息传递到控制模块16;所述流速采集子模块的具体作用是,检测所述导流板位置处的空气流速,传递到控制模块16来判断该流速下导流板该有的姿态;所述电子气压升降杆位移采集子模块的具体作用是,检测所述电子气压升降杆的位移,若位移长度与控制模块16输出的应有的位移信息不相同,驱动模块将会继续运行,直到电子气压升降杆的位移达到预期设想。
61.更进一步的,所述控制模块16中为芯片,能够接收采集模块的采集信息、储存预设的导流板姿态信息,能够通过流速采集信息输出对应的导流板姿态信息到驱动模块,并再次根据电子气压升降杆的位移采集信息判断导流板是否达到预期姿态,若未达到,将继续向驱动模块输出驱动信息;
62.更进一步的,所述储放模块2为长方体盒子,会占用一定的货箱15空间,使用铝合金材料,下前端外缘通过可活动铰链7连接在一起,另外一端通过第一电动气压升降杆与货箱15箱体连接。
63.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
64.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。