1.本发明涉及爬壁机器人技术领域,尤其是指一种基于形状记忆聚合物驱动的纸基爬壁机器人及其制作方法。
背景技术:
2.近年来,与传统的由金属、塑料等刚性材料制成的机器人不同,纸质机器人引起了越来越多的关注。纸质机器人以成本低、重量轻、生态友好和拥有优良的灵活性和可折叠性等特点,实现了医疗机器人、机车机器人等刚性机器人难以或无法实现的功能。
3.爬行作为被广泛应用的移动模式之一,已经在多种机器人身上得到实现,然而现有的爬行机器人多为弹性材料制成,一般面临着三个问题:
4.一方面,对于弹性材料制成的爬行机器人,在垂直方向爬行时,可能会受重力影响而变形;
5.另一方面,在静电吸附被广泛应用于软体爬行机器人这一背景下,由于弹性材料与接触面之间固有吸附力的存在,解除静电吸附后并不能使附着力完全消失;
6.并且,由弹性材料制备成的软体爬行机器人,其驱动元件复杂,需要设置多个驱动结构来带动爬行机器人中各个关节的转动。
技术实现要素:
7.为此,本发明所要解决的技术问题在于克服现有技术中弹性爬壁机器人存在的重力变形、固有吸附力残余及驱动复杂的问题,提供一种制作简单,工作可靠的轻质量的纸基爬壁机器人,并且通过形状记忆聚合物的材料特性提供纸基爬壁机器人的爬行动力。
8.为解决上述技术问题,本发明提供了一种基于形状记忆聚合物驱动的纸基爬壁机器人,包括:
9.条状纸臂,所述条状纸臂通过弯折形成两组对称设置的爬行臂,每组所述爬行臂均包括依次折弯连接的驱动大臂、驱动小臂及行走臂,两组所述驱动大臂、驱动小臂及行走臂对称设置;
10.形状记忆聚合物执行器,设置在两组驱动大臂及每组驱动大臂与驱动小臂之间,利用形状记忆聚合物可逆相及固定相的特性,实现两组驱动大臂之间角度的改变及恢复和每组驱动大臂与驱动小臂之间角度的改变及恢复;
11.吸附垫,设置在行走臂上,实现对条状纸臂的支撑及条状纸臂与行走面的吸附;
12.控制系统,分别与形状记忆聚合物执行器和吸附垫电连接,向形状记忆聚合物执行器和吸附垫发出控制信号。
13.在本发明的一个实施例中,所述形状记忆聚合物执行器包括形状记忆聚合物基材和设置在所述形状记忆聚合物基材弯曲内表面的铜质电阻片,通过所述铜质电阻片对形状记忆聚合物基材进行加热处理。
14.在本发明的一个实施例中,所述形状记忆聚合物基材的初始状态弯曲角度为
120
°
,通过所述铜质电阻片加热后的变换弯曲角度为60
°
,停止加热冷却到室温后保持变换弯曲角度60
°
,再次进行加热后恢复到初始状态弯曲角度为120
°
。
15.在本发明的一个实施例中,所述吸附垫包括纸垫基层,在所述纸垫基层上固化有电极吸附层,在所述电极吸附层外设置有绝缘保护层。
16.在本发明的一个实施例中,所述控制系统包括上位机、控制板、mosfet和电压转换器,所述上位机发出控制指令到控制板,所述控制板通过电压转换器与吸附垫电连接、控制所述吸附垫的通断,所述控制板通过mosfet与形状记忆聚合物执行器电连接、控制所述形状记忆聚合物执行器的激活状态,通过控制吸附垫的交替吸附和形状记忆聚合物执行器的周期性驱动,实现纸基爬壁机器人的行走。
17.为解决上述技术问题,本发明还提供了一种基于形状记忆聚合物驱动的纸基爬壁机器人的制造方法,包括以下步骤:
18.制备纸基爬壁机器人模型,将条状纸臂对折处理,形成对称设置的两组爬行臂,再将每组爬行臂分别进行折弯处理,形成驱动大臂、驱动小臂及行走臂,两组驱动大臂、驱动小臂及行走臂的位置对应设置;
19.在纸基爬壁机器人模型的两组驱动大臂及每组驱动大臂与驱动小臂之间的内折弯处安装形状记忆聚合物执行器,利用形状记忆聚合物可逆相及固定相的特性,实现两组驱动大臂之间角度的改变及恢复和每组驱动大臂与驱动小臂之间角度的改变及恢复,实现驱动大臂和驱动小臂的摆动;
20.在纸基爬壁机器人模型的两个行走臂上均安装能够支撑纸基爬壁机器人模型的吸附垫,通过吸附垫将纸基爬壁机器人模型吸附在爬行面上;
21.设置分别与形状记忆聚合物执行器和吸附垫电连接的控制系统,通过控制系统向两个吸附垫发出交替通断的控制信号、向多个形状记忆聚合物执行器发出周期性驱动信号,实现纸基爬壁机器人模型的爬行动作。
22.在本发明的一个实施例中,制备纸基爬壁机器人模型包括以下步骤:取条状纸臂利用激光切割机或其他切割设备,对条状纸臂的中轴线位置及中轴线两侧对称进行切割,切割厚度为条状纸臂的一半,沿切割位置对条形纸臂进行折弯处理,在中轴线的两侧形成对称设置的驱动大臂、驱动小臂及行走臂。
23.在本发明的一个实施例中,形状记忆聚合物执行器包括形状记忆聚合物基材,在形状记忆聚合物基材的弯曲内表面印刷铜质电阻片,在形状记忆聚合物基材的弯曲外表面贴敷有双面胶贴,通过双面胶贴贴敷在纸基爬壁机器人模型上;
24.形状记忆聚合物执行器包括形状记忆聚合物基材,在形状记忆聚合物基材的弯曲内表面印刷铜质电阻片,在形状记忆聚合物基材的弯曲外表面贴敷有双面胶贴,通过双面胶贴贴敷在纸基爬壁机器人模型上。
25.在本发明的一个实施例中,所述吸附垫的制备过程包括以下步骤:
26.取一张柔性非导电绝缘纸片,裁剪到所需尺寸,作为纸垫基层;
27.通过激光切割机或其他切割设备在丝网印版上加工出梳齿电极状的网孔,然后将丝网印版放在纸垫基层上;
28.在丝网印版上印刷ag/agcl油墨,以在纸垫基层上形成梳齿状电极;
29.取下丝网印版,保持电极朝上,将带有电极的纸垫基层放在加热板上烘烤固化电
极,在此过程中,将电线连接到未固化的电极上;
30.待电极固化完毕,取一片与纸垫基层尺寸相同的透明胶带贴在纸垫基层带有电极的一面上方,以使梳齿电极上表面与外界绝缘。
31.在本发明的一个实施例中,所述控制系统包括上位机、控制板、mosfet和电压转换器,所述上位机发出控制指令到控制板,所述控制板通过电压转换器与吸附垫电连接、控制所述吸附垫的通断,所述控制板通过mosfet与形状记忆聚合物执行器电连接、控制所述形状记忆聚合物执行器的激活状态,所述mosfet作为开关,当开关打开时,形状记忆聚合物执行器被加热,当开关关闭时,形状记忆聚合物执行器则冷却到室温,通过控制吸附垫的交替吸附和形状记忆聚合物执行器的周期性驱动,实现纸基爬壁机器人的行走。
32.本发明的上述技术方案相比现有技术具有以下优点:
33.本发明所述的基于形状记忆聚合物驱动的纸基爬壁机器人及其制造方法,将条状纸臂进行折弯处理,弯折形成具有驱动大臂、驱动小臂及行走臂的机器人模型,制作方法简单、且纸质的机器人模型成本低、重量轻、生态友好和拥有优良的灵活性和可折叠性等特点,实现了医疗机器人、机车机器人等刚性机器人难以或无法实现的功能;
34.将形状记忆聚合物执行器作为机器人的驱动源,利用形状记忆聚合物可逆相及固定相的特性,实现两组驱动大臂之间角度的改变及恢复和每组驱动大臂与驱动小臂之间角度的改变及恢复,从而为机械人模型提供爬行的动力;设置吸附垫,配合形状记忆聚合物执行器,在爬行的过程中实现对条状纸臂的支撑及条状纸臂与行走面的吸附;从而,有效解决了重力对弹性爬臂机器人引起的变形、弹性材料与接触面之间存在固有吸附力和驱动复杂的问题。
附图说明
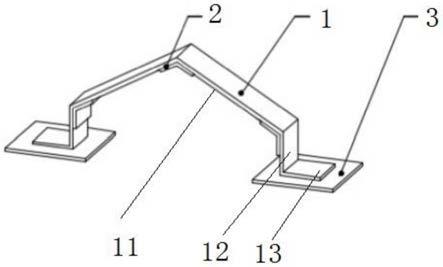
35.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中
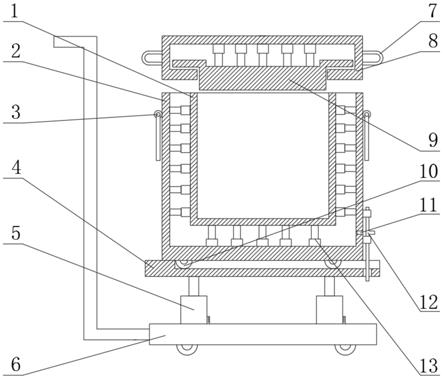
36.图1是本发明的基于形状记忆聚合物驱动的纸基爬壁机器人的结构示意图;
37.图2是本发明的吸附垫的结构示意图;
38.图3是本发明的控制系统的控制方式系统图;
39.图4是本发明的基于形状记忆聚合物驱动的纸基爬壁机器人的制造方法流程图;
40.图5是本发明的条状纸臂的切割图;
41.图6是本发明的吸附垫的制备流程图;
42.图7是本发明的纸基爬壁机器人的运动示意图。
43.说明书附图标记说明:1、条状纸臂;11、驱动大臂;12、驱动小臂;13、行走臂;2、形状记忆聚合物执行器;3、吸附垫;31、纸垫基层;32、,电极吸附层;33、绝缘保护层;
具体实施方式
44.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
45.实施例1
46.参照图1所示,本发明的一种基于形状记忆聚合物驱动的纸基爬壁机器人,包括:
47.条状纸臂1,选取打印纸或铜板纸等柔性制造裁剪成条状,所述条状纸臂1通过弯折形成两组对称设置的爬行臂,在每组所述爬行臂上再进行两次弯折,形成依次折弯连接的驱动大臂11、驱动小臂12及行走臂13,两组所述驱动大臂11、驱动小臂12及行走臂13对称设置,所述驱动大臂11的长度大于驱动小臂12的长度,所述驱动小臂12与驱动大臂11的弯折方向相同,所述行走臂13与驱动大臂11和驱动小臂12的弯折方向相反;通过条形纸臂1制备形成爬壁机器人模型,制作方法简单、且纸质的机器人模型成本低、重量轻、生态友好和拥有优良的灵活性和可折叠性等特点,实现了医疗机器人、机车机器人等刚性机器人难以或无法实现的功能;
48.形状记忆聚合物执行器2,本实施例中包括三个形状记忆聚合物执行器2,分别设置在两组驱动大臂11及每组驱动大臂11与驱动大臂12之间,所述形状记忆聚合物(shape memory polymer,简称smp),又称为形状记忆高分子,是指具有初始形状的制品在一定的条件下改变其初始条件并固定后,通过外界条件(如热、电、光、化学感应等)的刺激又可恢复其初始形状的高分子材料,实质上是高分子链以物理交联的方式形成固定相和可逆相:当温度升高至玻璃化转变温度以上时,可逆相分子链的微观布朗运动加剧,而固定相仍处于固化状态,此时以一定外力使smp发生变形,并保持外力使之冷却,可逆相固化得到稳定的新形状即变形态;当温度再升高至玻璃化转变温度以上时,可逆相软化,固定相保持固化,可逆相分子链运动复活,在固定相的恢复应力作用下逐步达到热力学平衡状态,即宏观表现为恢复原状;利用形状记忆聚合物可逆相及固定相的特性,实现两组驱动大臂11之间角度的改变及恢复和每组驱动大臂11与驱动大臂12之间角度的改变及恢复,从而为机械人模型提供爬行的动力;
49.吸附垫3,本实施例中包括两个吸附垫3分别设置在两个行走臂13上,所述吸附垫3配合形状记忆聚合物执行器2,在爬行的过程中实现对条状纸臂的支撑及条状纸臂与行走面的吸附,使本实施例中的爬壁机器人能够抓地行走,适用于竖直爬壁;
50.控制系统,分别与形状记忆聚合物执行器2和吸附垫3电连接,向形状记忆聚合物执行器2和吸附垫3发出控制信号,分别控制两个吸附垫3的交替通电与断电和三个形状记忆聚合物执行器2的不同激活状态,从而实现爬壁机器人的爬行动作。
51.具体地,所述形状记忆聚合物执行器2包括形状记忆聚合物基材和设置在所述形状记忆聚合物基材弯曲内表面的铜质电阻片,通过所述铜质电阻片通电升温对形状记忆聚合物基材进行加热处理;
52.本实施例中,所述形状记忆聚合物基材的初始状态弯曲角度为120
°
,所述形状记忆聚合物基材的玻璃化转变温度为95℃~105℃,通过所述铜质电阻片加热后至95℃~105℃后,所述形状记忆聚合物基材的变换弯曲角度为60
°
,停止加热冷却到室温后保持变换弯曲角度60
°
,再次进行加热后恢复到初始状态弯曲角度为120
°
,从而采用不断的对铜质电阻片通断电加热的方式实现形状记忆聚合物基材的弯曲角度的变化,从而实现驱动大臂11与驱动大臂11、驱动大臂11与驱动大臂12之间的摆动。
53.参照图2所示,所述吸附垫3包括纸垫基层31,所述纸垫基层31选取打印纸、铜版纸、包装纸等柔性纸材,对吸附表面没有固有附着力,能够适用各种平滑表面;在所述纸垫基层31上固化有电极吸附层32,在所述电极吸附层32外设置有绝缘保护层33,通过对所述电极吸附层32的通断电处理,实现吸附垫3不同的工作状态。
54.参照图3所示,所述控制系统包括上位机、控制板、mosfet和电压转换器,所述上位机包括电脑终端、手机终端等能够发出控制指令到控制板;
55.所述控制板通过电压转换器与吸附垫3电连接、控制所述吸附垫3的通断,控制板对吸附垫3的控制是通过控制板的5v电压经过脉冲宽度调制(pwm),再经由电压转换器的放大后,可对吸附垫3提供高达5000v的电压;
56.所述控制板通过mosfet与形状记忆聚合物执行器2电连接、控制所述形状记忆聚合物执行器2的激活状态,所述mosfet作为开关,当开关打开时,形状记忆聚合物执行器2被加热,当开关关闭时,形状记忆聚合物执行器2则冷却到室温,通过控制吸附垫3的交替吸附和形状记忆聚合物执行器2的周期性驱动,实现纸基爬壁机器人的行走。
57.实施例2
58.参照图4所示,本发明的一种基于形状记忆聚合物驱动的纸基爬壁机器人的制造方法,用于制备上述纸基爬壁机器人,包括以下步骤:
59.制备纸基爬壁机器人模型:将条状纸臂对折处理,形成对称设置的两组爬行臂,再将每组爬行臂分别进行折弯处理,形成驱动大臂、驱动大臂及行走臂,两组驱动大臂、驱动大臂及行走臂的位置对应设置;
60.在制备纸基爬壁机器人模型中安装形状记忆聚合物执行器作为驱动源:在纸基爬壁机器人模型的两组驱动大臂每组驱动大臂与驱动小臂之间的内折弯处安装形状记忆聚合物执行器,利用形状记忆聚合物可逆相及固定相的特性,实现两组驱动大臂之间角度的改变及恢复和每组驱动大臂与驱动小臂之间角度的改变及恢复,实现驱动大臂和驱动小臂的摆动;
61.在制备纸基爬壁机器人模型中安装用于爬行的吸附垫:在纸基爬壁机器人模型的两个行走臂上均安装能够支撑纸基爬壁机器人模型的吸附垫,通过吸附垫将纸基爬壁机器人模型吸附在爬行面上;
62.设置分别与形状记忆聚合物执行器和吸附垫电连接的控制系统:通过控制系统向两个吸附垫发出交替通断的控制信号、向多个形状记忆聚合物执行器发出周期性驱动信号,实现纸基爬壁机器人模型的爬行动作。
63.具体地,制备纸基爬壁机器人模型包括以下步骤:
64.参照图5所示,选取打印纸或铜板纸等柔性制造裁剪成条状纸臂,取条状纸臂利用激光切割机或其他切割设备,对条状纸臂的中轴线位置及中轴线两侧对称进行切割,如图中的虚线位置,切割厚度小于条状纸臂的厚度,不能将条状纸臂切断,本实施例中切割厚度为条状纸臂的一半,沿切割位置对条形纸臂进行折弯处理,在中轴线的两侧形成对称设置的驱动大臂、驱动小臂及行走臂,所述驱动大臂的长度大于驱动小臂的长度,所述驱动小臂与驱动大臂的弯折方向相同,所述行走臂与驱动大臂和驱动小臂的弯折方向相反。
65.具体地,本实施例中,形状记忆聚合物执行器包括形状记忆聚合物基材,在形状记忆聚合物基材的弯曲内表面印刷铜质电阻片,在形状记忆聚合物基材的弯曲外表面贴敷有双面胶贴,通过双面胶贴贴敷在纸基爬壁机器人模型上;
66.所述形状记忆聚合物基材的初始状态弯曲角度为120
°
,所述形状记忆聚合物基材的玻璃化转变温度为95℃~105℃,通过所述铜质电阻片加热后至95℃~105℃后,所述形状记忆聚合物基材的变换弯曲角度为60
°
,停止加热冷却到室温后保持变换弯曲角度60
°
,
再次进行加热后恢复到初始状态弯曲角度为120
°
,从而采用不断的对铜质电阻片通断电加热的方式实现形状记忆聚合物基材的弯曲角度的变化,从而实现驱动大臂与驱动大臂、驱动大臂与驱动小臂之间的摆动。
67.参照图6所示,所述吸附垫的制备过程包括以下步骤:
68.取一张柔性非导电绝缘纸片,裁剪到所需尺寸,作为纸垫基层;
69.通过激光切割机或其他切割设备在丝网印版上加工出梳齿电极状的网孔,然后将丝网印版放在纸垫基层上;
70.在丝网印版上印刷ag/agcl油墨,以在纸垫基层上形成梳齿状电极;
71.取下丝网印版,保持电极朝上,将带有电极的纸垫基层放在加热板上烘烤固化电极,在此过程中,将电线连接到未固化的电极上,电线的另一端连接到控制系统中;
72.待电极固化完毕,取一片与纸垫基层尺寸相同的透明胶带贴在纸垫基层带有电极的一面上方,以使梳齿电极上表面与外界绝缘。
73.参照图7所示,本发明的爬壁机器人的爬行过程为:
74.以竖直爬行为例,默认向上为前进方向,定义图中两个吸附垫沿竖直方向分别为上侧吸附垫和下侧吸附垫,定义吸附垫通电为开启状态,断电为关闭状态;定义图中三个形状记忆聚合物执行器沿竖直方向分别为上部形状记忆聚合物执行器、中部形状记忆聚合物执行器和下部形状记忆聚合物执行器,定义形状记忆聚合物执行器加热至95℃以上变为临时形状(弯曲角度为60
°
)为激活状态#1,再次加热至95℃以上后恢复永久形状(弯曲角度为120
°
)为激活状态#2;
75.在初始位置,整个机器人停留在墙上,两个吸附垫均为开启状态;三个形状记忆聚合物执行器弯曲角度为120
°
;
76.开始爬行时,下侧吸附垫关闭,上侧吸附垫保持开启状态,下部形状记忆聚合物执行器加热至95℃以上,处于激活状态#1,弯曲角度变为60
°
,下侧吸附垫受力脱离墙面,解除残余吸附力;
77.加热中部形状记忆聚合物执行器使其处于激活状态#1,弯曲角度由120
°
变为60
°
,下侧吸附垫受力向上移动;下侧形状记忆聚合物执行器再次加热,处于激活状态#2,弯曲角度恢复至120
°
,下侧吸附垫开启;
78.上侧吸附垫关闭,下侧吸附垫保持开启状态,上部形状记忆聚合物执行器加热至95℃以上,处于激活状态#1,弯曲角度变为60
°
,上侧吸附垫受力脱离地面,解除残余吸附力;
79.加热中间形状记忆聚合物执行器使其处于激活状态#2,弯曲角度由60
°
变为120
°
,上侧吸附垫受力向上移动,上部形状记忆聚合物执行器再次加热,处于激活状态#2,弯曲角度恢复至120
°
,上侧吸附垫开启,至此完成一个循环。
80.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。