1.本实用新型涉及机器人技术领域,具体而言,涉及一种机器人。
背景技术:
2.机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如生产业、建筑业,或是危险的工作。现有技术中的机器人基本分为工业和教育两大类,对于娱乐类的机器人比较少见,比如玩具游戏类机器人,而且现有技术中的玩具游戏类机器人通常是独立站立在桌面上,在电源开关未打开情况下是无法活动的,缺乏趣味性。
3.例如公开号为cn214019175u的中国实用新型专利,其公开了一种机器人玩具,包括可转动头部、躯干部、两个可活动手臂部、两个可活动脚部,所述可活动手臂部通过第一连接结构与所述躯干部相连接,从而实现所述可活动手臂部的转动,可活动脚部通过第二连接结构与躯干部相连接,从而实现可活动脚部的转动,通过设置使得玩具机器人在活动时更具人性化,即可提示活动关节卡到位,还能增加玩具机器人的趣味性。但是该机器人各个部件设计的不够精细,整体上不够巧妙,而且电线外露不美观;另外,该机器人玩具的动作不够精细,不能够双足行走,摔倒后无法自己站起来,且关节少,自由度低。
4.又例如公开号为cn211513396u的中国实用新型专利,其公开了一种玩具机器人,包括移动机构、躯干部壳体、头部壳体和两个手臂壳体,移动机构包括底盘、安装在底盘上的多个轮子以及能够驱动轮子转动的行走电机,所述玩具机器人还包括躯干转动机构,躯干部壳体可转动安装在底盘上且其转动轴线为上下方向,躯干转动机构包括躯干转动电机、躯干转动驱动齿轮和圆弧齿条,圆弧齿条固定安装在底盘上,躯干转动电机固定安装在躯干部壳体中,躯干转动驱动齿轮与躯干转动电机的动力输出轴传动连接,躯干转动驱动齿轮与圆弧齿条啮合。该躯干转动机构的结构简单紧凑,使得玩具机器人能够方便地完成躯干部壳体扭转的动作,且结构简单紧凑,有利于降低制造成本。但是该机器人零部件设计的不够精细,机器人能够完成的动作比较单一,且关节少,自由度低。
技术实现要素:
5.为了解决现有技术存在的上述技术缺陷,本实用新型的目的在于提供一种机器人,解决现有技术中机器人功能单一的问题。
6.为了实现上述设计目的,本实用新型采用的方案如下:
7.本实用新型的机器人,包括头部、躯干部、位于躯干部的两侧相互对称的胳膊结构,以及位于躯干部下端相互对称的腿部结构,其特征在于:头部、躯干部、胳膊结构以及腿部结构中均设有舵机,在舵机的驱动下,头部可以转动、胳膊结构可以弯曲转动摆动、腿部结构能够双足行走,跌倒后能自行爬起来(前爬起,后躺起);腿部结构(下端的脚部上设有转动轮以及通过语言和手机app控制的车灯。
8.本实用新型的机器人能够前爬起,后躺起,即当机器人倒下面部向下时,身体的腰部部位向上拱起,大腿前滑盖机构向下滑动,小腿上翻板向外转动、小腿下翻板向上翻起,随后手部的手指按住地面、脚底板与地面贴合,保持身体重心平衡,平稳站起;同理,当机器人倒下后背贴地时,身体的腰部部位向上拱起,随后手部的手指向后按住地面、脚底板与地面贴合,保持身体重心平衡,平稳站起。
9.本实用新型的机器人高度地还原了《变形金刚》g1动画片版中大黄蜂形象,并首次将该大黄蜂形象以电动玩具机器人的形式呈现;另外,该款机器人的眼睛能亮,使《变形金刚》g1动画片版中大黄蜂的形象更加真实。
10.优选的是,所述头部包括位于中心部位的头部舵机以及通过卡扣可拆卸组装在一起的头上壳、头右壳、眼睛、头左壳和面部结构,头上壳的两侧开有圆弧孔放置右犄角和左犄角;头部舵机固定在头部固定件与头部舵机固定件之间;眼睛的后端设有反光件,眼睛的下端抵靠在头部pcba板上。
11.在上述任一方案中优选的是,所述躯干部包括两个肩胛舵机、电池和两个胯部舵机,电池的前后两面贴有双面胶,双面胶上粘贴有前钣金件和后钣金件,前钣金件与后钣金件将电池、肩胛舵机、胯部舵机夹在中间,分别在钣金件上部和下部用螺丝紧固;并且在胯部舵机的下方用螺丝将胯下支撑钣金件固定,如此构成躯干主体骨架,前钣金件和后钣金件的组装体的两侧设有限位固定件;胯下支撑钣金件的前后两侧设有螺钉柱,螺钉柱的下端开有方槽,该方槽用于固定卡扣组件;胯部舵机的外部设有腰下前壳和腰下后壳;腰下前壳上设有腰上前壳和腰下前盖;腰下后壳上设有腰上壳和腰下后盖。
12.在上述任一方案中优选的是,所述后钣金件外部设有后背前壳,后钣金件与后背前壳之间从前向后依次设有语音pcba板、胸后壳固定件、喇叭和网孔件;后背前壳的外部设有后背后壳,后背后壳的下部安装有接口固定件、电源与数据接口;后背后壳的顶部从上向下依次安装有开关按钮、后背小装饰件和后背大装饰件。
13.在上述任一方案中优选的是,所述前钣金件上设有主pcba板和胸中壳,胸中壳的外部设有下车窗、左车窗、右车窗以及胸前壳;胸中壳上部设有胸上盖、脖子,并且胸中壳上部左右两侧设有肩胛装饰件。
14.在上述任一方案中优选的是,所述胳膊结构包括肩膀舵机、大臂舵机、小臂舵机和手部结构,肩膀舵机与大臂舵机通过肩膀舵盘连接在一起,肩膀舵机的下部设有肩膀左圈壳和肩膀右圈壳;肩膀舵机位于肩膀壳内,肩膀舵机的一侧设有肩膀u型组件,所述肩膀u型组件包括第一肩膀u型件、第二肩膀u型件、肩膀u型件盖子以及线卡。
15.在上述任一方案中优选的是,所述大臂舵机与小臂舵机通过大臂舵盘连接在一起,大臂舵机的两侧安装有大臂后壳、大臂前壳、大臂舵盘盖;小臂舵机的两侧安装有小臂后壳、小臂前壳以及小臂后壳盖子,小臂舵机的底部安装手部连接件;所述手部结构包括通过螺钉连接在一起的手部左壳和手部右壳以及通过关节轴与手部右壳连接在一起的大拇指关节。
16.在上述任一方案中优选的是,所述腿部结构包括大腿根u型件体、大腿、小腿、脚踝、脚,所述大腿包括两个组合在一起的大腿舵机,组合件的两侧通过螺钉连接大腿右壳和大腿左壳;大腿右壳的前部安装有滑盖机构,该滑盖机构包括弹簧、大腿第一前滑盖、大腿第二前滑盖以及大腿前盖;大腿根u型件体包括大腿根第一u型件、大腿根第二u型件、大腿
根第三u型件、大腿根第四u型件、大腿根上线盖以及大腿根下线盖;所述小腿包括小腿外壳、小腿左侧壳、小腿右侧壳、小腿上翻板、轴、扭簧、小腿舵机以及小腿下翻板,其中小腿上翻板和小腿下翻板均能绕轴转动。
17.在上述任一方案中优选的是,所述脚踝包括脚踝a件,脚踝b件和脚踝盖子;所述脚踝的一端连接小腿舵机,另一端连接脚部舵机,脚部舵机下端固定在连接有脚部舵机后固定件的脚部舵机下固定件上。
18.在上述任一方案中优选的是,所述脚部舵机、脚部舵机下固定件以及脚部舵机后固定件的外部套有脚上壳,脚上壳上安装有轮胎、车轮固定件、车轮支撑件、脚灯pcba板、轮毂以及车轮轴;脚上壳的底部与安装有脚部连接座、车轮盖板的脚下壳连接在一起。
附图说明
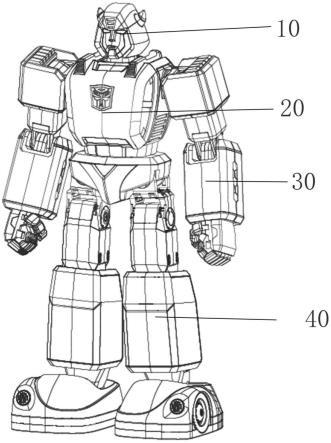
19.图1为按照本实用新型的机器人的一优选实施例的结构示意图。
20.图2为按照本实用新型的机器人的图1所示优选实施例的后视图。
21.图3为按照本实用新型的机器人的图1所示优选实施例中头部的拆分图。
22.图4为按照本实用新型的机器人的图1所示优选实施例中躯干部的拆分图。
23.图5为按照本实用新型的机器人的图1所示优选实施例中胳膊结构的拆分图。
24.图6为按照本实用新型的机器人的图5所示优选实施例中胳膊结构内部走线示意图。
25.图7为按照本实用新型的机器人的图6所示优选实施例的仰视图。
26.图8为按照本实用新型的机器人的图1所示优选实施例腿部结构的拆分图。
27.图9为按照本实用新型的机器人的图8所示优选实施例的大腿根u型件体走线示意图。
28.图10为按照本实用新型的机器人的图8所示优选实施例中脚踝的拆分图。
29.图11为按照本实用新型的机器人的图10所示优选实施例走线图。
30.图12为按照本实用新型的机器人的图10所示优选实施例的仰视图。
具体实施方式
31.以下的说明本质上仅仅是示例性的而并不是为了限制本公开、应用或用途。下面结合说明书附图对本实用新型的机器人的具体实施方式作进一步的说明。
32.如图1、图2所示,按照本实用新型的机器人的整体结构示意图。
33.本实用新型的机器人,包括头部10、躯干部20、位于躯干部20的两侧相互对称的胳膊结构30,以及位于躯干部20下端相互对称的腿部结构40,所述头部10、躯干部20、胳膊结构30以及腿部结构40中均设有舵机,在舵机的驱动下,头部10可以转动、胳膊结构30可以弯曲转动摆动、腿部结构40能够双足行走,跌倒后能自行爬起来(前爬起,后躺起);腿部结构40下端的脚部上设有转动轮以及通过语言和手机app控制的车灯。该款机器人能够前爬起,后躺起,即当机器人倒下面部向下时,身体的腰部部位向上拱起,大腿前滑盖机构向下滑动,小腿上翻板462向外转动、小腿下翻板4621向上翻起,保持身体重心平衡,平稳站起;同理,当机器人倒下后背贴地时,身体的腰部部位向上拱起,随后手部的手指向后按住地面、脚底板与地面贴合,保持身体重心平衡,平稳站起。
34.接下来参阅图3所示,按照本实用新型的机器人的图1所示优选实施例中头部的拆分图。
35.在本实施例中,所述头部10包括位于中心部位的头部舵机18以及通过卡扣可拆卸组装在一起的头上壳11、头右壳16、眼睛17、头左壳111和面部结构19,头上壳11的两侧开有圆弧孔放置右犄角12和左犄角13;头部舵机18固定在头部固定件15与头部舵机固定件113之间;眼睛17的后端设有反光件14,眼睛17的下端抵靠在头部pcba板112上。
36.头部10的装配过程为:首先将头部舵机18固定在头部固定件15与头部舵机固定件113之间,接下来将头右壳16中的限位槽插入头部舵机固定件113的侧部的连接板上,然后安装眼睛17、反光件14以及头部pcba板112,头部pcba板112上装有led灯,当led灯打开时眼睛17能亮(由于眼睛17的后端装有反光件14,led灯的光束会到达眼睛17中被水平的反射出来);紧接着安装面部19,将眼睛17、头部pcba板112的前端面板插入面部19内部的凹槽中;然后将头左壳111与头右壳16、面部19、头部固定件15以及头部舵机固定件113的组装件卡合在一起,最后将右犄角12、左犄角13、头上壳11固定在头部组装件的顶部,最后用螺钉拧紧。
37.如图4所示,按照本实用新型的机器人的图1所示优选实施例中躯干部的拆分图。
38.在本实施例中,所述躯干部20包括两个肩胛舵机225、电池224和两个胯部舵机242,电池224的前后两面贴有双面胶223,双面胶223上粘贴有前钣金件222和后钣金件229,前钣金件222与后钣金件229将电池224、肩胛舵机225、胯部舵机242夹在中间,分别在钣金件上部和下部用螺丝紧固,并且在胯部舵机242的下方用螺丝将胯下支撑钣金件241固定,如此构成躯干主体骨架;前钣金件222和后钣金件229的组装体的两侧设有限位固定件228,胯下支撑钣金件241的前后两侧设有螺钉柱,螺钉柱的下端开有方槽,该方槽用于固定卡扣组件;胯部舵机242的外部设有腰下前壳24和腰下后壳243;腰下前壳24上设有腰上前壳23和腰下前盖231;腰下后壳243上设有腰上壳26和腰下后盖244。
39.在本实施例中,所述后钣金件229外部设有后背前壳27,后钣金件229与后背前壳27之间从前向后依次设有语音pcba板2231、胸后壳固定件2232、喇叭2233和网孔件2234;后背前壳27的外部设有后背后壳28,后背后壳28的下部安装有接口固定件261、电源与数据接口262;后背后壳28的顶部从上向下依次安装有开关按钮281、后背小装饰件282和后背大装饰件283。
40.在本实施例中,所述前钣金件222上设有主pcba板221和胸中壳22,胸中壳22的外部设有下车窗211、左车窗213、右车窗212以及胸前壳21。胸中壳22上部设有胸上盖226、脖子25,并且胸中壳22上部左右两侧设有肩胛装饰件227。
41.躯干部20的装配过程为:首先搭建躯干的骨架,将肩胛舵机225、电池224以及两个胯部舵机242排布好,在电池224的前后两面贴上双面胶223用于粘贴前钣金件222和后钣金件229,将钣金件上的螺钉孔拧上螺钉,从而将肩胛舵机225、电池224以及两个胯部舵机242夹持固定在一起,需要说明的是在前钣金件222和后钣金件229的上端拧紧螺钉之前两侧需要安装限位固定件228,该限位固定件的作用是在胳膊结构30安装在肩胛舵机225时,需要对胳膊的转动范围进行限制,该限位固定件就对胳膊结构30的转动角度起到了限位作用。
42.接下来,将胯下支撑钣金件241安装在两个胯部舵机242的下端,该钣金件的前后两侧设有螺钉柱(螺钉柱的作用是拧螺钉),螺钉柱的下端开有方槽,该方槽用于固定卡扣
组件;然后安装腰下前壳24和腰下后壳243,紧接着安装腰上前壳23、腰下前盖231、腰上壳26和腰下后盖244。
43.接下来安装后背组件,后背组件安装时首先将语音pcba板2231、胸后壳固定件2232、喇叭2233、网孔件2234从前到后依次装入后背前壳27中,接下来将以上组装件安装在后背后壳28上,在后背后壳28的下部,先安装电源与数据接口,再安装接口固定件,然后在后背后壳28的顶部从上向下依次安装开关按钮281、后背小装饰件282和后背大装饰件283。然后,通过螺钉将后背组件与躯干骨架连接固定。
44.最后安装主pcba板221和胸中壳22,接下来安装胸上盖226和脖子25,在胸中壳22上安装下车窗211、右车窗212和左车窗213,把胸中壳22扣上,在胸中壳22上方扣上肩胛装饰件227。
45.参阅图5所示,按照本实用新型的机器人的图1所示优选实施例中胳膊结构的拆分图。
46.在本实施例中,所述胳膊结构30包括肩膀舵机315、大臂舵机321、小臂舵机342和手部结构,肩膀舵机315与大臂舵机321通过肩膀舵盘316连接在一起,肩膀舵机315的下部设有肩膀左圈壳317和肩膀右圈壳318;肩膀舵机315位于肩膀壳31内,肩膀舵机的一侧设有肩膀u型组件,所述肩膀u型组件包括第一肩膀u型件311、第二肩膀u型件312、肩膀u型件盖子313以及线卡314。
47.在本实施例中,所述大臂舵机321与小臂舵机342通过大臂舵盘323连接在一起,大臂舵机321的两侧安装有大臂后壳32、大臂前壳33、大臂舵盘盖322;小臂舵机342的两侧安装有小臂后壳34、小臂前壳35以及小臂后壳盖子341,小臂舵机342的底部安装手部连接件361;所述手部结构包括通过螺钉连接在一起的手部左壳362和手部右壳363以及通过关节轴364与手部右壳363连接在一起的大拇指关节365。
48.胳膊结构30的装配过程为:首先将肩膀舵机315通过肩膀舵盘316与大臂舵机321连接在一起,再将小臂舵机342与大臂舵盘盖322、大臂舵盘323连接在一起,接下来将第一肩膀u型件311、第二肩膀u型件312、肩膀u型件盖子313以及线卡314的组装体连接在肩膀舵机315上,再扣上大臂后壳32、大臂前壳33、肩膀左圈壳317、肩膀右圈壳318,最后盖上肩膀壳31拧紧肩膀壳31下部的螺钉。
49.接下来安装手部结构,首先使用螺钉将手部左壳362与手部右壳363连接在一起,用关节轴364,将大拇指关节与手部右壳363连接起来(大拇指可以转动),再盖上手背壳36,然后将手部左壳362通过手部连接件361(手部左壳362与手部连接件361的连接部位留有间隙,从而使整个手部部分可以转动)与小臂舵机342连接在一起,最后装上小臂后壳34、小臂前壳35,扣上小臂后壳盖子341,完成胳膊结构30的安装。
50.如图6、图7所示,按照本实用新型的机器人的图5所示优选实施例中胳膊结构内部走线示意图。
51.胳膊结构30的走线为:电线首先从大臂舵机321顶部的出线孔引出穿过肩膀舵盘316连到肩膀舵机315接线端子座,然后电线经过第一肩膀u型件311的a孔和b孔,穿过第二肩膀u型件31的c孔,延走线槽,最终从出线孔引出;大臂舵机321下端的电线顺着大臂舵盘323上线槽与小臂舵机342的接线端子连接。
52.参阅图8所示,按照本实用新型的机器人的图1所示优选实施例腿部结构的拆分
图。
53.在本实施例中,所述腿部结构40包括大腿根u型件体、大腿、小腿、脚踝、脚,所述大腿中包括两个组合在一起的大腿舵机451,该组合件的两侧通过螺钉连接大腿右壳45和大腿左壳453;大腿右壳45的前部安装有滑盖机构,该滑盖机构包括弹簧452、大腿第一前滑盖455、大腿第二前滑盖456以及大腿前盖454;大腿根u型件体包括大腿根第一u型件41、大腿根第二u型件42、大腿根第三u型件43以及大腿根第四u型件44、大腿根上线盖441以及大腿根下线盖421;所述小腿包括小腿外壳46、小腿左侧壳466、小腿右侧壳461、小腿上翻板462、轴463、扭簧464、小腿舵机465以及小腿下翻板4621,其中小腿上翻板462和小腿下翻板4621均能绕轴转动。
54.如图9所示,按照本实用新型的机器人的图8所示优选实施例的大腿根u型件体走线示意图。
55.导线的一端连接大腿舵机451,然后分别穿过d孔
‑‑
c孔
‑‑
b孔
‑‑
a孔再连接到胯部舵机242。
56.如图10所示,按照本实用新型的机器人的图8所示优选实施例中脚踝的拆分图。
57.在本实施例中,所述脚踝包括脚踝a件468、脚踝b件469和脚踝盖子467;所述脚踝的一端连接小腿舵机465,另一端连接脚部舵机471,脚部舵机471下端固定在连接有脚部舵机后固定件473的脚部舵机下固定件472上。
58.在本实施例中,所述脚部包括脚部舵机471、脚部舵机下固定件472以及脚部舵机后固定件473的外部套有脚上壳47,脚上壳47上安装有轮胎48、车轮固定件481、车轮支撑件482、脚灯pcba板483、轮毂484以及车轮轴485;脚上壳47的底部与安装有脚部连接座491、车轮盖板486的脚下壳49连接在一起。
59.腿部结构40的装配过程为:首先将两个大腿舵机451组装在一起,扣上大腿右壳45、大腿左壳453拧紧螺钉,接下来在大腿的前部装上弹簧452、大腿第一前滑盖455、大腿第二前滑盖456以及大腿前盖454,然后安装大腿根第一u型件41、大腿根第二u型件42、大腿根第三u型件43以及大腿根第四u型件44、大腿根上线盖441以及大腿根下线盖421。接下来安装脚踝部分,首先放上小腿舵机465,将脚踝件468固定在小腿舵机465上,然后安装上脚踝小件469,扣上脚踝盖子467,完成脚踝的组装,然后将脚部舵机471与脚踝件468的端部连接在一起,套上脚上壳47,接下来将脚部舵机471的底部固定在脚部舵机下固定件472上,再在脚部舵机下固定件472上固定连接脚部舵机后固定件473,紧接着将脚上壳47向下移动到一定位置后装上轮胎48、车轮固定件481、车轮支撑件482、脚灯pcba板483、轮毂484以及车轮轴485,最后将装有脚部连接座491、车轮盖板486的脚下壳49与脚上壳47固定连接在一起。
60.然后安装小腿部分,首先将小腿右侧壳461扣在小腿舵机465上,接下来通过轴463、扭簧464将小腿上翻板462和小腿下翻板4621安装在小腿右侧壳461,然后安装上小腿左侧壳466上,最后盖上小腿外壳46,脚部结构40组装完成。
61.最后参阅图11、图12所示,按照本实用新型的机器人的图10所示优选实施例走线图。
62.腿部结构40的走线为:大腿舵机451上的导线从舵机出线孔走出,然后顺着大腿根u型件分别穿过d孔
‑‑
c孔
‑‑
b孔
‑‑
a孔(见图9所示),向上走与躯干部20连接;小腿舵机465上的导线从下方的圆孔中引出进入到脚踝件468中走线槽,然后从底部的圆孔中走出,接着进
入到脚部舵机471底部的脚部舵机下固定件472,最后插在脚部连接座491上。
63.本领域技术人员不难理解,本实用新型的机器人包括本说明书中各部分的任意组合。限于篇幅且为了使说明书简明,在此没有将这些组合一一详细介绍,但看过本说明书后,由本说明书构成的各部分的任意组合构成的本实用新型的范围已经不言自明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。