技术特征:
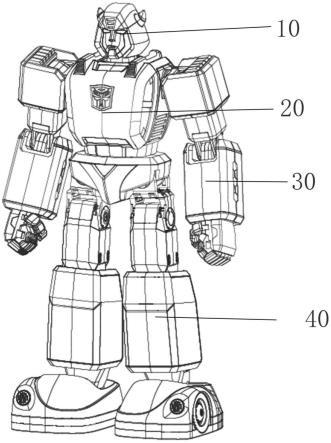
1.一种机器人,包括头部(10)、躯干部(20)、位于躯干部(20)的两侧相互对称的胳膊结构(30),以及位于躯干部(20)下端相互对称的腿部结构(40),其特征在于:头部(10)、躯干部(20)、胳膊结构(30)以及腿部结构(40)中均设有舵机;腿部结构(40)下端的脚部上设有转动轮以及通过语言和手机app控制的车灯。2.如权利要求1所述的机器人,其特征在于:头部(10)包括位于中心部位的头部舵机(18)以及通过卡扣可拆卸组装在一起的头上壳(11)、头右壳(16)、眼睛(17)、头左壳(111)和面部结构(19),头上壳(11)的两侧开有圆弧孔放置右犄角(12)和左犄角(13);头部舵机(18)固定在头部固定件(15)与头部舵机固定件(113)之间;眼睛(17)的后端设有反光件(14),眼睛(17)的下端抵靠在头部pcba板(112)上。3.如权利要求1所述的机器人,其特征在于:躯干部(20)包括两个肩胛舵机(225)、电池(224)和两个胯部舵机(242),电池(224)的前后两面贴有双面胶(223),双面胶(223)上粘贴有前钣金件(222)和后钣金件(229),前钣金件(222)和后钣金件(229)将电池(224)、肩胛舵机(225)、胯部舵机(242)夹在中间,分别在钣金件上部和下部用螺丝紧固,在胯部舵机(242)的下方用螺丝将胯下支撑钣金件(241)固定,如此构成躯干主体骨架;前钣金件(222)和后钣金件(229)的组装体的两侧设有限位固定件(228);胯下支撑钣金件(241)的前后两侧设有螺钉柱,螺钉柱的下端开有方槽;胯部舵机(242)的外部设有腰下前壳(24)和腰下后壳(243);腰下前壳(24)上设有腰上前壳(23)和腰下前盖(231);腰下后壳(243)上设有腰上壳(26)和腰下后盖(244)。4.如权利要求3所述的机器人,其特征在于:后钣金件(229)外部设有后背前壳(27),后钣金件(229)与后背前壳(27)之间从前向后依次设有语音pcba板(2231)、胸后壳固定件(2232)、喇叭(2233)和网孔件(2234);后背前壳(27)的外部设有后背后壳(28),后背后壳(28)的下部安装有接口固定件(261)、电源与数据接口(262);后背后壳(28)的顶部从上向下依次安装有开关按钮(281)、后背小装饰件(282)和后背大装饰件(283)。5.如权利要求3所述的机器人,其特征在于:前钣金件(222)上设有主pcba板(221)和胸中壳(22),胸中壳(22)的外部设有下车窗、左车窗(213)和右车窗(212);胸中壳(22)的上部设有胸上盖(226)、脖子(25),并且胸中壳(22)上部左右两侧设有肩胛装饰件(227)。6.如权利要求1所述的机器人,其特征在于:胳膊结构(30)包括肩膀舵机(315)、大臂舵机(321)、小臂舵机(342)和手部结构,肩膀舵机(315)与大臂舵机(321)通过肩膀舵盘(316)连接在一起,肩膀舵机(315)的下部设有肩膀左圈壳(317)和肩膀右圈壳(318);肩膀舵机(315)位于肩膀壳(31)内,肩膀舵机的一侧设有肩膀u型组件,所述肩膀u型组件包括第一肩膀u型件(311)、第二肩膀u型件(312)、肩膀u型件盖子(313)以及线卡(314)。7.如权利要求6所述的机器人,其特征在于:大臂舵机(321)与小臂舵机(342)通过大臂舵盘(323)连接在一起,大臂舵机(321)的两侧安装有大臂后壳(32)、大臂前壳(33)、大臂舵盘盖(322);小臂舵机(342)的两侧安装有小臂后壳(34)、小臂前壳(35)以及小臂后壳盖子(341),小臂舵机(342)的底部安装手部连接件(361);所述手部结构包括通过螺钉连接在一起的手部左壳(362)和手部右壳(363)以及通过关节轴(364)与手部右壳(363)连接在一起的大拇指关节(365)。8.如权利要求1所述的机器人,其特征在于:腿部结构(40)包括大腿根u型件体、大腿、小腿、脚踝、脚,所述大腿包括两个大腿舵机(451)、大腿左壳(453)、大腿右壳(45)以及前滑
盖机构,所述前滑盖机构包括弹簧(452)、大腿第一前滑盖(455)、大腿第二前滑盖(456)以及大腿前盖(454);大腿根u型件体包括大腿根第一u型件(41)、大腿根第二u型件(42)、大腿根第三u型件(43)、大腿根第四u型件(44)、大腿根上线盖(441)以及大腿根下线盖(421);所述小腿包括小腿外壳(46)、小腿左侧壳(466)、小腿右侧壳(461)、小腿上翻板(462)、轴(463)、扭簧(464)、小腿舵机(465)以及小腿下翻板(4621),其中小腿上翻板(462)和小腿下翻板(4621)均能绕轴转动。9.如权利要求8所述的机器人,其特征在于:所述脚踝包括脚踝a件(468),脚踝b件(469)和脚踝盖子(467);所述脚踝的一端连接小腿舵机(465),另一端连接脚部舵机(471),脚部舵机(471)下端固定在连接有脚部舵机后固定件(473)的脚部舵机下固定件(472)上。10.如权利要求9所述的机器人,其特征在于:脚部舵机(471)、脚部舵机下固定件(472)以及脚部舵机后固定件(473)的外部套有脚上壳(47),脚上壳(47)上安装有轮胎(48)、车轮固定件(481)、车轮支撑件(482)、脚灯pcba板(483)、轮毂(484)以及车轮轴(485);脚上壳(47)的底部与安装有脚部连接座(491)、车轮盖板(486)的脚下壳(49)连接在一起。
技术总结
本实用新型涉及一种机器人,包括头部(10)、躯干部(20)、位于躯干部(20)的两侧相互对称的胳膊结构(30),以及位于躯干部(20)下端相互对称的腿部结构(40),头部(10)、躯干部(20)、胳膊结构(30)以及腿部结构(40)中均设有舵机,在舵机的驱动下,头部(10)可以转动、胳膊结构(30)可以弯曲转动摆动、腿部结构(40)能够双足行走,跌倒后能自行爬起来(前爬起,后躺起);腿部结构(40)下端的脚部上设有转动轮以及通过语言和手机app控制的车灯。本实用新型高度地还原了《变形金刚》G1动画片版中大黄蜂形象,并首次将该大黄蜂形象以电动玩具机器人的形式呈现;机器人的眼睛能亮,使《变形金刚》G1动画片版中大黄蜂的形象更加真实。G1动画片版中大黄蜂的形象更加真实。G1动画片版中大黄蜂的形象更加真实。
技术研发人员:陈小森 郑黎明 于敦宁 王电
受保护的技术使用者:乐森机器人(深圳)有限公司
技术研发日:2022.06.15
技术公布日:2022/9/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。