1.本实用新型涉及机器人领域,尤其涉及一种智能避障的餐厅送餐机器人。
背景技术:
2.随着社会经济的快速发展,越来越多的场合需要机器人配合作业,在城市生活中,机器人可以承担运输物品、公共咨询服务等,尤其是餐饮机器人深受人们喜爱,但是餐厅内部地形复杂障碍物多,使得机器人易发生碰撞造成机器人内部运输的物品倾洒、破损,影响菜品的品相及产品的口味。
3.所以设计一款能够自动避障且能够减少碰撞时冲击的机器人是解决上述技术问题的最好手段。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种智能避障的餐厅送餐机器人,以解决餐厅内部地形复杂障碍物多,使得机器人易发生碰撞造成机器人内部运输的物品倾洒、破损,影响菜品的品相及产品的口味的问题。
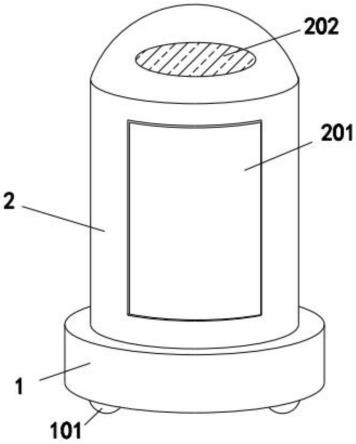
5.本实用新型一种智能避障的餐厅送餐机器人的目的与功效,由以下具体技术手段达成:一种智能避障的餐厅送餐机器人,包括底盘、机身,所述机身固定连接于底盘上,且底盘底部转动连接有延伸至底盘外的移动滚珠,同时移动滚珠顶部的底盘中嵌入有驱动移动滚珠的电动机,所述底盘外壁上开设有镶嵌槽,且镶嵌槽中嵌入有探测环,同时镶嵌槽上下两端底盘侧壁上设有避障组件。
6.其中,所述机身内部呈空心结构,且机身外部内壁上开设有舱门,同时机身顶端外壁上固定连接有控制面板。
7.其中,所述探测环内部开设有环形的设备槽,且设备槽中固定连接有多个独立设置的探测雷达,同时探测雷达与机器人控制终端信号连接,所述探测环外壁中设有发射窗,且发射窗为玻璃材质。
8.其中,所述探测雷达呈扇形设置,且探测雷达信号发射面相互交错。
9.其中,所述避障组件包括进气口、导向滚珠,所述进气口开设于底盘顶部内部外侧,且导向滚珠转动连接于底盘外侧内壁上。
10.其中,所述导向滚珠内部竖向开设有进气管,且导向滚珠中心开设有出气管,同时出气管道与进气管导通连接。
11.其中,所述进气管道中固定连接有吸气扇。
12.其中,所述导向滚珠底部开设有啮合槽,且啮合槽中啮合连接有驱动电机,同时驱动电机固定连接于底盘内部。
13.有益效果:
14.(1)通过设有探测环,利用其内部设置的探测雷达将外部环境情况转换为电信号传输至机器人控制终端,从而规划机器人的行动路线,实现智能规划行动路线比派障碍物
的效果。
15.(2)通过设有避障组件,利用导向滚珠在驱动电机带动其旋转,使得在机器人意外接触到障碍物时通过导向滚珠为机器人提供引导力,从而使得机器人快速离开障碍物,实现意外碰撞后快速离开障碍物的效果。
16.(3)通过设有导向滚珠,利用其进气管内部的吸气扇在导向滚珠旋转时将外部的空气吸入其内部,并通过出气管道排出,从而使导向滚珠外部形成气流,实现当机器人意外碰撞时减少冲击力的效果。
附图说明
17.图1为本实用新型整体结构示意图。
18.图2为本实用新型底盘结构示意图。
19.图3为本实用新型底盘拆解结构示意图。
20.图4为本实用新型探测环俯视剖面结构示意图。
21.图5为本实用新型导向滚珠结构示意图。
22.图1-5中,部件名称与附图编号的对应关系为:
23.1-底盘、101-移动滚珠、102-探测环、103-避障组件、104-进气口、105-镶嵌槽、106-设备槽、107-探测雷达、108-发射窗、109-进气管、110-吸气扇、111-出气管道、112-啮合槽、113-驱动电机、114-导向滚珠、2-机身、201-舱门、202-控制面板。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.实施例:
26.如附图1至附图5所示:
27.在机器人承载食物进行运输时,底座1外部的探测环102中的探测雷达107将实时对外部发射探测信号,并将外部环境状况进行收集反馈至控制终端进行分析,从而规划机器人的行动路径达到避开障碍物的效果。
28.当机器人运动时突然出现障碍物来不及避开时,探测雷达107将信号传输至控制终端后,控制终端将驱动避障组件103运行,此时,靠近障碍物一侧的避障组件103将工作,同时,导向滚珠114将在驱动电机113的带动下旋转。
29.在导向滚珠114旋转时,其内部进气管109中的吸气扇110将将外部空气通过进气口104吸入其内部并进入出气管道111中,此时,导向滚珠114外部将形成一圈环形气流,在遇到较小较轻的障碍物时将把障碍物推开,同时,当机器人与障碍物接触时,在导向滚珠114的作用下机器人将快速绕开障碍物,并且在环形气流的作用下减少与障碍物碰撞产生的冲击力,从而达到防止其内部承载的食物倾洒、破损。
30.工作原理:首先,将食物放置在机身2内部,并通过控制面板202选择所需送餐的位置,机器人将向目的地移动。
31.在机器人承载食物进行运输时,底座1外部的探测环102中的探测雷达107将实时对外部发射探测信号,并将外部环境状况进行收集反馈至控制终端进行分析,从而规划机器人的行动路径达到避开障碍物。
32.当机器人运动时突然出现障碍物来不及避开时将驱动避障组件103运行,在导向滚珠114的作用下机器人将快速绕开障碍物,并且在环形气流的作用下减少与障碍物碰撞产生的冲击力,从而达到防止其内部承载的食物倾洒、破损。
技术特征:
1.一种智能避障的餐厅送餐机器人,包括底盘(1)、机身(2),所述机身(2)设置于底盘(1)顶部,其特征在于:所述底盘(1)底部设有延伸至底盘外的移动组件,且底盘(1)外壁上开设有槽口,且槽口中设有探测环(102),同时探测环(102)上下两端的底盘(1)外壁上设有避障组件(103)。2.根据权利要求1所述的智能避障的餐厅送餐机器人,其特征在于:所述机身(2)内部呈空心结构,且机身(2)上设有舱门(201),同时机身(2)顶端设有控制面板(202)。3.根据权利要求1所述的智能避障的餐厅送餐机器人,其特征在于:所述探测环(102)内部开设有设备槽(106),且设备槽(106)中设有探测雷达(107),同时探测环(102)外壁中设有发射窗(108),并且发射窗(108)为透明材质。4.根据权利要求3所述的智能避障的餐厅送餐机器人,其特征在于:所述探测雷达(107)发射面相互交错,且探测雷达(107)与机器人控制终端信号连接。5.根据权利要求1所述的智能避障的餐厅送餐机器人,其特征在于:所述避障组件(103)包括进气口(104)、导向滚珠(114),所述进气口(104)开设与底盘(1)顶部,且导向滚珠(114)设立于底盘(1)外壁上。6.根据权利要求5所述的智能避障的餐厅送餐机器人,其特征在于:所述导向滚珠(114)内部分别开设有竖向横向的管道,且管道之间相互导通,同时管道与导向滚珠(114)外部导通。7.根据权利要求6所述的智能避障的餐厅送餐机器人,其特征在于:所述导向滚珠(114)内部竖向设置的管道中设有吸气结构。8.根据权利要求7所述的智能避障的餐厅送餐机器人,其特征在于:所述导向滚珠(114)底部设有啮合结构,且结合结构中连接有动力设备。
技术总结
本实用新型涉及机器人领域,尤其涉及一种智能避障的餐厅送餐机器人,包括底盘、机身,机身固定连接于底盘上,且底盘底部转动连接有延伸至底盘外的移动滚珠,同时移动滚珠顶部的底盘中嵌入有驱动移动滚珠的电动机,底盘外壁上开设有镶嵌槽,且镶嵌槽中嵌入有探测环,同时镶嵌槽上下两端底盘侧壁上设有避障组件,本实用新型提供一种智能避障的餐厅送餐机器人为解决餐厅内部地形复杂障碍物多,使得机器人易发生碰撞造成机器人内部运输的物品倾洒、破损,影响菜品的品相及产品的口味的问题。影响菜品的品相及产品的口味的问题。影响菜品的品相及产品的口味的问题。
技术研发人员:杜林
受保护的技术使用者:东莞市均谊视觉科技有限公司
技术研发日:2021.12.24
技术公布日:2022/9/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。