技术特征:
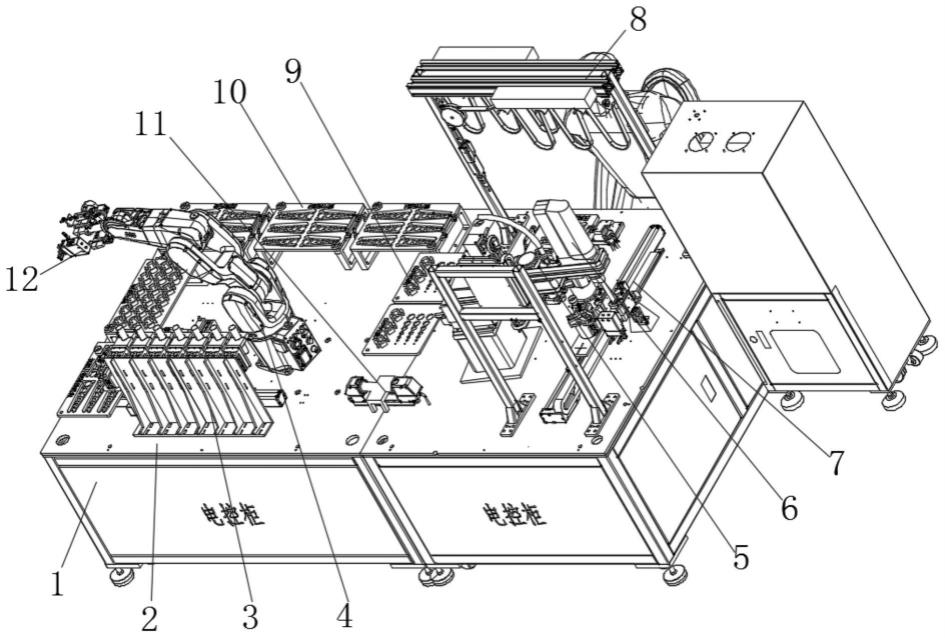
1.多机器人协同光学零件自动化精密测量装配设备,其特征在于:包括电控柜(1),所述电控柜(1)为两组,两组所述电控柜(1)的顶部共同安装有工作台(2),所述工作台(2)顶部的中间位置处安设有公共托盘(9),所述工作台(2)顶部的一侧为自动测量工站,所述工作台(2)顶部的另一侧为自动装配工站;所述自动测量工站分别由精密气动内径测量机构(3)、测量抓取机器人(4)、放料托盘(10)、光学测量系统(11)和高精度激光测量系统(12)组合而成,所述工作台(2)顶部一侧的边缘处均匀安设有放料托盘(10),所述工作台(2)顶部靠近公共托盘(9)的一端设有光学测量系统(11),所述工作台(2)顶部靠近光学测量系统(11)的一侧设有精密气动内径测量机构(3),所述工作台(2)顶部靠近公共托盘(9)的一侧安装有测量抓取机器人(4),所述测量抓取机器人(4)的端头处分别设有第一真空吸盘和高精度激光测量系统(12);所述自动装配工站分别由自动装配机器人(5)、视觉系统(6)、自动粘胶机构(7)和自动化拧紧系统(8)组合而成,所述工作台(2)顶部一侧的中间位置处分别设有自动装配机器人(5)和自动粘胶机构(7),所述自动装配机器人(5)的端头处分别设有第二真空吸盘和视觉系统(6),所述工作台(2)顶部靠近自动装配机器人(5)的背面一端设有自动化拧紧系统(8)。2.根据权利要求1所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:所述精密气动内径测量机构(3)由精密气动内径测量仪构成,用于精密测量镜筒内部各级孔径,拟采用精密气动测量系统定制物镜与目镜探头,分别测量物镜与目镜孔径。3.根据权利要求1所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:所述测量抓取机器人(4)和自动装配机器人(5)由机器人本体及机器人头部工装组成,且头部工装设置多个用于拾取不同类型的物料的抓手。4.根据权利要求1所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:多组所述放料托盘(10)分别用于承载各种镜片、隔圈、镜筒等,每种物料设计专用托盘,每个托盘可承载10到20件物料,多组所述放料托盘(10)统一外形规格。5.根据权利要求1所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:所述光学测量系统(11)用于测量镜片中心与机器人抓手之间的偏差,所述光学测量系统(11)拟采用机器视觉及图像测量软件实现。6.根据权利要求1所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:所述高精度激光测量系统(12)用于在镜片及垫圈时测量镜片中心高度。7.根据权利要求1所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:所述自动化拧紧系统(8)分别包括助力悬挂系统和采用恒力悬挂吊挂自动拧紧枪,用于人工拧紧压圈时控制拧紧力矩,并记录拧紧数据。8.根据权利要求1所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:所述自动粘胶机构(7)用于自动装配工站中完成胶圈自动涂胶粘接在压圈上,镜筒开孔自动涂胶密封,所述自动粘胶机构(7)由三维运动机构及自动化点胶机构组成。9.根据权利要求8所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:所述自动化点胶机构由单组螺杆点胶系统构成。10.根据权利要求1所述的多机器人协同光学零件自动化精密测量装配设备,其特征在于:所述公共托盘(9)有两组,两组所述公共托盘(9)位于自动测量工站和自动装配工站之间。
技术总结
本发明公开了多机器人协同光学零件自动化精密测量装配设备,包括电控柜,所述电控柜为两组,两组所述电控柜的顶部共同安装有工作台,所述工作台顶部的中间位置处安设有公共托盘,所述工作台顶部的一侧为自动测量工站,所述工作台顶部的另一侧为自动装配工站;本发明通过工作台台面上的自动测量工站和自动装配工站相互结合,实现镜头的自动化装配和检测作业,并协同进行,促使镜头在检测过程中自动化装配生产,解决了镜头光学零件在检测和装配作业之间的搬运空档期,从而替代人工,提高镜头装配效率及质量。装配效率及质量。
技术研发人员:李康 刁海南
受保护的技术使用者:浙江清华长三角军民协同创新研究院(嘉兴)
技术研发日:2022.06.10
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。