1.本发明涉及无人飞行器技术领域,特别是涉及一种水陆空三栖涵道无人机,具有在空中、水中、陆上三种环境下执行任务的能力。
背景技术:
2.当前的无人机常应用于地形侦察、航拍等军民用领域。尤其是军用领域,无人机凭借其成本低、隐蔽性高、机动灵活的特点,受到越来越高的重视。随着军事领域的应用增加,对无人机的任务环境提出了更多的要求。要求无人机不仅可以在空中执行任务,还需要在地面和水中工作,拥有更广的任务执行范围和更强的灵活性。因此,需要一种三栖飞行器,能够在三种介质环境下执行任务。
3.当前国内关于三栖无人机的专利,主要是面向空中、陆上和水面上三种工作环境的。公告号为cn111532430b的中国发明专利《一种可水陆空三栖的无人机》提出了一种三栖无人机通过增大与水的接触面积,能够浮在水面上工作。公开号为cn113459739a的中国发明专利申请《一种水陆空多功能三栖无人机》提出了一种三栖无人机,设计了浮船模块,浮在水面上,通过四旋翼驱动无人机在水面上工作。但以上两个专利都只能在水面上工作,水面上工作的隐蔽性不如水中工作。
4.公开号为cn114013649a的中国发明申请《一种三栖跨介质横列倾转双旋翼飞行器》提出了一种横列倾转双旋翼飞行器,整体采用固定翼飞机构型,通过两个横列布置的倾转旋翼提供动力,在地面工作时通过轮子滑跑,其地面机动能力较差,且地面滑跑速度较大时会飞离地面。
5.公开号为cn111114772a的中国发明申请《一种可垂直起降三栖跨介质飞行器》提出了一种采用两个倾转旋翼和一个涵道旋翼的三栖飞行器,整体采用固定翼机型,结构复杂,三个旋翼的整体动力效率不高。
6.综上所述,如何使得三栖无人机有更好的动力效率、地面机动性,并能够在水中执行任务,结构更紧凑,更小型化,从而能够真正意义上实现三栖,就成为了本领域技术人员亟待解决的技术问题。
技术实现要素:
7.本发明针对以上问题,提出了一种水陆空三栖涵道无人机,解决了无人机的跨介质工作需求,相比于已有的三栖无人机,有更好的动力效率、地面机动性,并能够在水中执行任务,结构更紧凑,更小型化。具备了在空中、水中、陆上三种介质环境下执行任务的能力。
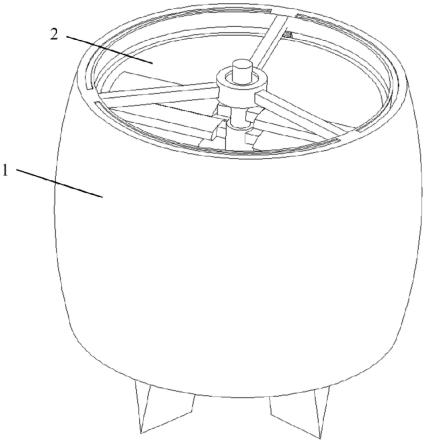
8.本发明的技术方案为:所述无人机由外到内依次包括滚动外壳1、涵道2以及上中心体5,所述滚动外壳1的顶口及底口处分别设有与其固定相连的上支撑架3及下支撑架7;所述上中心体5的一端设有无人机主轴22,并且另一端设有与无人机主轴22同轴心的固定轴;所述无人机主轴22贯穿所述上支撑架3,所述固定轴则贯穿下支撑架7;
所述涵道2通过连接板6与上中心体5固定相连,并且涵道2的内壁上还固定连接有行走动力源,所述行走动力源的输出轴与上支撑架3或下支撑架7相连接,通过行走动力源带动上支撑架3或下支撑架7旋转,进而带动滚动外壳1相对于涵道2旋转;所述无人机还包括共轴双旋翼4以及下中心体7;所述共轴双旋翼4中的两对旋翼分别固定连接在无人机主轴22以及一套筒23上,所述无人机主轴22贯穿套筒23,所述共轴双旋翼4的驱动机构设置在上中心体5之内,通过该驱动机构驱动两对旋翼以相同的转速,相反方向旋转;所述下中心体7通过固定轴与上中心体5固定相连;所述下中心体7的侧壁上还设有若干舵面8,所述舵面8的根部通过驱动轴可旋转的连接在下中心体7的侧壁上,并且下中心体7之内设有若干与舵面8一一对应的旋转动力源,所述旋转动力源的输出轴与所述驱动轴相连接,通过若干旋转动力源带动若干舵面8独立的进行往复摆动。
9.进一步的,所述无人机还包括设置在上中心体5之内的重心调节机构,所述重心调节机构包括重心调节舵机17、丝杆18、丝杆螺母19、基座20以及两个固定板21,两个固定板21都固定连接在上中心体5之内,所述重心调节舵机17固定连接在其中一个固定板21上,所述丝杆18平行于无人机主轴22设置,并且其两端分别与两个固定板21可旋转的相连接,所述丝杆18还与重心调节舵机17的输出轴相连接,并且贯穿丝杆螺母19,所述丝杆18与丝杆螺母19通过螺纹连接,所述基座20则固定连接在丝杆螺母19上;所述无人机还包括设置在上中心体5之内的电池以及平行于无人机主轴的长条滑轨,所述电池滑动连接在长条滑轨上,并且与基座20固定相连。
10.进一步的,所述无人机还包括保护机构包括可伸出或缩入滚动外壳1与涵道2之间的保护壳12,在所述滚动外壳1的顶口及底口处都布置有保护壳。
11.进一步的,所述保护壳包括若干保护壳单片14,每个保护壳单片14上都固定连接有一连接条15所述连接条15上连接有齿轮13以及保护壳舵机,所述齿轮13通过转轴可旋转的连接在连接条15上,所述保护壳舵机固定连接在连接条15上,并且其输出轴与转轴固定相连;所述滚动外壳1的内壁上还固定连接有若干弧形齿条16,所述齿轮13与弧形齿条16保持啮合。
12.进一步的,所述滚动外壳1与涵道2之间还固定连接有若干导轨25,所述转轴上还连接有导轮24,所述导轮贴合与所述导轨25的外侧。
13.进一步的,所述行走动力源为滚动外壳电机10,所述滚动外壳电机10的输出轴通过锥齿轮组11连接上支撑架3或下支撑架7,所述锥齿轮组11中的一个齿轮与滚动外壳电机10的输出轴同轴心,并且固定相连,所述锥齿轮组11中的另一个齿轮与上支撑架3或下支撑架7同轴心,并且固定相连,所述锥齿轮组11中的两个齿轮保持啮合。
14.进一步的,所述旋转动力源为舵面舵机,所述舵面舵机的输出轴与驱动轴固定相连。
15.本发明基于无人机的跨介质工作需求,提出了一种三栖涵道无人机,采用共轴双旋翼设计,共轴双旋翼在空中和水中为无人机提供动力。涵道外侧加装滚动外壳,使无人机具备在地面滚动前进的能力。所以本发明具备了在空中、水中、陆上三种环境下执行任务的能力,提高了无人机的环境适应能力。
16.相较于传统的水面作业无人机,本案设计的无人机主体结构为涵道无人机,使得无人机可以完全潜入水中,执行任务时具有更强的隐蔽性,并且没有漂浮结构,整体结构更小型化。
17.相较于传统的固定翼飞机构型,本案设计涵道外侧加装滚动外壳,使无人机以椭球体在地面滚动前进,转向灵活,机动性较好。并且,采用共轴双旋翼和涵道加装滚动外壳的设计,整体结构简化紧凑,动力效率更高。
18.本发明的有益效果:一、采用共轴双旋翼和滚动外壳,分别提供了无人机在空中、水中和陆上的动力,使得无人机具备了在空中、水中和陆上三种环境下跨介质执行任务的能力,提高了无人机的环境适应能力和工作灵活性。
19.二、采用共轴双旋翼作为动力机构,使得无人机有更高的气动效率和能量利用率。
20.三、采用滚动外壳作为无人机在地上的动力机构,通过重心调节来进行转弯,有较强的地面运动灵活性。
21.四、采用可伸缩的保护壳使得无人机可以有更小的地面转弯半径,进一步增强了地面运动灵活性,并在地面工作过程中保护了舵面和旋翼的安全。
22.五、采用共轴双旋翼和滚动外壳的设计,使得无人机结构紧凑,更加利于小型化,增强其执行任务时的隐蔽性。
附图说明
23.图1是本案整体的结构示意图;图2是本案内部的结构示意图;图3是本案在地上工作时的使用状态参考图;图4是本案中保护壳的结构示意图;图5是本案中滚动外壳和保护壳的剖面图;图6是本案中重心调节机构的结构示意图;图7是本案中滚动外壳和保护壳连接方式的示意图;图中1、滚动外壳,2、涵道,3、上支撑架,4、共轴双旋翼,5、上中心体,6、连接板,7、下支撑架,8、舵面,9、下中心体,10、滚动外壳电机,11、锥齿轮组,12、保护壳,13、齿轮,14、保护壳单片,15、连接条,16、弧形齿条,17、重心调节舵机,18、丝杆,19、丝杆螺母,20、基座,21、固定板,22、无人机主轴,23、套筒,24、导轮,25、导轨。
具体实施方式
24.为能清楚说明本案的技术特点,下面通过具体实施方式,并结合其附图,对本案进行详细阐述。
25.本发明如图1-7所示,所述无人机由外到内依次包括滚动外壳1、涵道2以及上中心体5,所述滚动外壳1的顶口及底口处分别设有与其固定相连的上支撑架3及下支撑架7;所述上中心体5的一端设有无人机主轴22,并且另一端设有与无人机主轴22同轴心的固定轴;所述无人机主轴22贯穿所述上支撑架3,所述固定轴则贯穿下支撑架7;所述涵道2通过连接板6与上中心体5固定相连,并且涵道2的内壁上还固定连接有
行走动力源,所述行走动力源的输出轴与上支撑架3或下支撑架7相连接,通过行走动力源带动上支撑架3或下支撑架7旋转,进而带动滚动外壳1相对于涵道2旋转,使无人机具备了在地上移动的能力;所述无人机还包括共轴双旋翼4以及下中心体7;所述共轴双旋翼4中的两对旋翼分别固定连接在无人机主轴22以及一套筒23上,所述无人机主轴22贯穿套筒23,所述共轴双旋翼4的驱动机构设置在上中心体5之内,通过该驱动机构驱动两对旋翼以相同的转速,相反方向旋转;需要解释的是,共轴双旋翼4的驱动机构为现有技术中的一种常规技术,比如《机械设计》2021年7月第38卷第7期中刘帅所写的“一种共轴双旋翼无人直升机旋翼及操纵系统设计”,以及《航空学报》2013年5月25日中袁夏明,朱纪洪等所写的“一种共轴式直升机操纵机构的运动学建模与分析”所示,其中旋翼电机通过齿轮传动机构改变转动方向,保证严格地以相同的转速,相反方向同时驱动共轴双旋翼4,并可通过变桨距机构减小桨距角或增大桨距角。
26.所述下中心体7通过固定轴与上中心体5固定相连;所述下中心体7的侧壁上还设有若干舵面8,所述舵面8的根部通过驱动轴可旋转的连接在下中心体7的侧壁上,并且下中心体7之内设有若干与舵面8一一对应的旋转动力源,所述旋转动力源的输出轴与所述驱动轴相连接,通过若干旋转动力源带动若干舵面8独立的进行往复摆动。
27.所述无人机还包括设置在上中心体5之内的重心调节机构,所述重心调节机构包括重心调节舵机17、丝杆18、丝杆螺母19、基座20以及两个固定板21,两个固定板21都固定连接在上中心体5之内,所述重心调节舵机17固定连接在其中一个固定板21上,所述丝杆18平行于无人机主轴22设置,并且其两端分别与两个固定板21可旋转的相连接,所述丝杆18还与重心调节舵机17的输出轴相连接,并且贯穿丝杆螺母19,所述丝杆18与丝杆螺母19通过螺纹连接,所述基座20则固定连接在丝杆螺母19上;所述无人机还包括设置在上中心体5之内的电池以及平行于无人机主轴的长条滑轨,所述电池滑动连接在长条滑轨上,并且与基座20固定相连。
28.通过对电池位置的调节来调节无人机的重心位置,使无人机具备在地上转弯的能力。
29.所述无人机还包括保护机构包括可伸出或缩入滚动外壳1与涵道2之间的保护壳12,在所述滚动外壳1的顶口及底口处都布置有保护壳。
30.在空中和水中工作模式时,保护壳收进滚动外壳内,方便舵面的操纵以改变无人机姿态。在陆上工作模式时,保护壳伸出滚动外壳,保护舵面和旋翼免受损伤,也使得无人机可以有更小的地面转弯半径,进一步增强了地面运动灵活性。
31.所述保护壳包括若干保护壳单片14,每个保护壳单片14上都固定连接有一连接条15,所述连接条15上连接有齿轮13以及保护壳舵机,所述齿轮13通过转轴可旋转的连接在连接条15上,所述保护壳舵机固定连接在连接条15上,并且其输出轴与转轴固定相连;所述滚动外壳1的内壁上还固定连接有若干弧形齿条16,所述齿轮13与弧形齿条16保持啮合。这样,即可通过保护壳舵机带动齿轮13旋转,从而带动各个保护壳单片14独立的在滚动外壳1与涵道2之间伸出或缩入。
32.所述滚动外壳1与涵道2之间还固定连接有若干导轨25,所述转轴上还连接有导轮24,所述导轮贴合与所述导轨25的外侧。从而使得齿轮与弧形齿条保持啮合,以保证动力的
稳定输出。
33.所述行走动力源为滚动外壳电机10,所述滚动外壳电机10的输出轴通过锥齿轮组11连接上支撑架3或下支撑架7,所述锥齿轮组11中的一个齿轮与滚动外壳电机10的输出轴同轴心,并且固定相连,所述锥齿轮组11中的另一个齿轮与上支撑架3或下支撑架7同轴心,并且固定相连,所述锥齿轮组11中的两个齿轮保持啮合。
34.所述旋转动力源为舵面舵机,所述舵面舵机的输出轴与驱动轴固定相连。
35.本案的三栖涵道无人机,通过共轴双旋翼4提供在空中和水中的动力,通过滚动外壳1提供动力,进而具备在空中、水中、陆上三种环境下跨介质工作能力。
36.在空中和水中工作时,上中心体5中的无人机控制器,根据设在上中心体之内的陀螺仪、加速度传感器、导航模块等得到的信息,控制旋翼电机的输出功率,旋翼电机通过齿轮传动机构改变转动方向,保证严格地以相同的转速,相反方向同时驱动共轴双旋翼4。进入空中工作模式时,共轴双旋翼4通过变桨距机构减小桨距角,保证较高的转速。进入水中工作模式时,共轴双旋翼4通过变桨距机构增大桨距角,保证有较低的转速和较大的水下推力。在空中和水中工作模式时,无人机的姿态通过舵面8来改变。上中心体5中的控制器控制下中心体9中的舵面舵机,驱动四个舵面8调整至与机身主轴平行的位置,即中立位。在飞行和潜航过程中,根据机身姿态和运动轨迹要求,舵面8由舵面舵机调节角度产生对应的姿态力矩。在空中和水中工作时,保护壳12收在滚动外壳内,方便舵面8的操纵以改变无人机姿态。无人机的电池、电调等部件都做防水设计,保证在水中时无人机的工作安全。
37.三栖涵道无人机通过在涵道2外侧加装滚动外壳1赋予了无人机在陆上移动的能力。滚动外壳1与上支撑架3和下支撑架7固接,保证滚动外壳1可以绕无人机主轴转动。滚动外壳电机10通过一对锥齿轮11驱动滚动外壳1相对于涵道转动,进而使得无人机在地面上移动。
38.如图3所示,是本案的一种水陆空三栖涵道无人机在地上工作时的示意图。在进入陆上工作模式时,上中心体5中的控制器控制下中心体8中的舵面舵机,驱动四个舵面8调整至与机身主轴垂直的位置固定。以便收在滚动外壳1内侧的保护壳12伸出,可以在无人机地面移动过程中保护舵面和旋翼免受损伤,也使得无人机可以有更小的地面转弯半径,进一步增强了地面运动灵活性。
39.丝杆螺母19的移动带动无人机的电池移动,进而调节了无人机的重心位置。整个机构通过固定板21与上中心体5固定。在陆上工作模式时,当无人机需要向某一侧转弯时,重心调节舵机17驱动无人机电池向该侧移动,使无人机的重心向该侧偏移,进而完成无人机向该侧的转弯动作。
40.其中无人机降落及从地面起飞的过程需要特别说明。
41.三栖涵道无人机降落至地面的过程:无人机悬停在距离地面10cm左右高度的位置,此时操纵舵面8,使机身产生滚转力矩,缓慢侧倒至滚动外壳1接触地面。然后共轴双旋翼4停止转动,舵面8收起并固定在与机身主轴垂直的位置。通过控制重心调节舵机17根据机身姿态调节重心位置,使机身稳定下来。待机身停稳后,将保护壳12伸出,滚动外壳电机10工作,进入陆上工作模式。
42.三栖涵道无人机从地面起飞的过程:滚动外壳电机10停止转动,通过控制重心调节舵机17使机身稳定。然后将保护壳12收进滚动外壳1内,舵面8偏转至中立位,共轴双旋翼
4工作,偏转舵面8转动产生机身抬头力矩,无人机起飞离开地面,最后通过操纵舵面8保持空中的稳定,进入空中工作模式。
43.本发明具体实施途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。