技术特征:
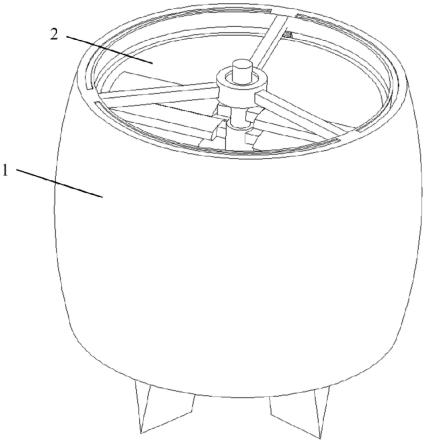
1.一种水陆空三栖涵道无人机,其特征在于,所述无人机由外到内依次包括滚动外壳(1)、涵道(2)以及上中心体(5),所述滚动外壳(1)的顶口及底口处分别设有与其固定相连的上支撑架(3)及下支撑架(7),所述上中心体(5)的一端设有无人机主轴(22),并且另一端设有与无人机主轴(22)同轴心的固定轴;所述无人机主轴(22)贯穿所述上支撑架(3),所述固定轴则贯穿下支撑架(7);所述涵道(2)通过连接板(6)与上中心体(5)固定相连,并且涵道(2)的内壁上还固定连接有行走动力源,所述行走动力源的输出轴与上支撑架(3)或下支撑架(7)相连接,通过行走动力源带动上支撑架(3)或下支撑架(7)旋转,进而带动滚动外壳(1)相对于涵道(2)旋转;所述无人机还包括共轴双旋翼(4)以及下中心体(7);所述共轴双旋翼(4)中的两对旋翼分别固定连接在无人机主轴(22)以及一套筒(23)上,所述无人机主轴(22)贯穿套筒(23),所述共轴双旋翼(4)的驱动机构设置在上中心体(5)之内,通过该驱动机构驱动两对旋翼以相同的转速,相反方向旋转;所述下中心体(7)通过固定轴与上中心体(5)固定相连;所述下中心体(7)的侧壁上还设有若干舵面(8),所述舵面(8)的根部通过驱动轴可旋转的连接在下中心体(7)的侧壁上,并且下中心体(7)之内设有若干与舵面(8)一一对应的旋转动力源,所述旋转动力源的输出轴与所述驱动轴相连接,通过若干旋转动力源带动若干舵面(8)独立的进行往复摆动。2.根据权利要求1所述的一种水陆空三栖涵道无人机,其特征在于,所述无人机还包括设置在上中心体(5)之内的重心调节机构,所述重心调节机构包括重心调节舵机(17)、丝杆(18)、丝杆螺母(19)、基座(20)以及两个固定板(21),两个固定板(21)都固定连接在上中心体(5)之内,所述重心调节舵机(17)固定连接在其中一个固定板(21)上,所述丝杆(18)平行于无人机主轴(22)设置,并且其两端分别与两个固定板(21)可旋转的相连接,所述丝杆(18)还与重心调节舵机(17)的输出轴相连接,并且贯穿丝杆螺母(19),所述丝杆(18)与丝杆螺母(19)通过螺纹连接,所述基座(20)则固定连接在丝杆螺母(19)上;所述无人机还包括设置在上中心体(5)之内的电池以及平行于无人机主轴的长条滑轨,所述电池滑动连接在长条滑轨上,并且与基座(20)固定相连。3.根据权利要求1所述的一种水陆空三栖涵道无人机,其特征在于,所述无人机还包括保护机构包括可伸出或缩入滚动外壳(1)与涵道(2)之间的保护壳(12),在所述滚动外壳(1)的顶口及底口处都布置有保护壳。4.根据权利要求3所述的一种水陆空三栖涵道无人机,其特征在于,所述保护壳包括若干保护壳单片(14),每个保护壳单片(14)上都固定连接有一连接条(15)所述连接条(15)上连接有齿轮(13)以及保护壳舵机,所述齿轮(13)通过转轴可旋转的连接在连接条(15)上,所述保护壳舵机固定连接在连接条(15)上,并且其输出轴与转轴固定相连;所述滚动外壳(1)的内壁上还固定连接有若干弧形齿条(16),所述齿轮(13)与弧形齿条(16)保持啮合。5.根据权利要求4所述的一种水陆空三栖涵道无人机,其特征在于,所述滚动外壳(1)与涵道(2)之间还固定连接有若干导轨(25),所述转轴上还连接有导轮(24),所述导轮贴合与所述导轨(25)的外侧。
6.根据权利要求1所述的一种水陆空三栖涵道无人机,其特征在于,所述行走动力源为滚动外壳电机(10),所述滚动外壳电机(10)的输出轴通过锥齿轮组(11)连接上支撑架(3)或下支撑架(7),所述锥齿轮组(11)中的一个齿轮与滚动外壳电机(10)的输出轴同轴心,并且固定相连,所述锥齿轮组(11)中的另一个齿轮与上支撑架(3)或下支撑架(7)同轴心,并且固定相连,所述锥齿轮组(11)中的两个齿轮保持啮合。7.根据权利要求1所述的一种水陆空三栖涵道无人机,其特征在于,所述旋转动力源为舵面舵机,所述舵面舵机的输出轴与驱动轴固定相连。
技术总结
本发明公开了一种水陆空三栖涵道无人机,涉及无人飞行器技术领域。解决了无人机的跨介质工作需求,相比于已有的三栖无人机,有更好的动力效率、地面机动性,并能够在水中执行任务。所述无人机由外到内依次包括滚动外壳、涵道以及上中心体;所述上中心体的一端设有无人机主轴,并且另一端设有与无人机主轴同轴心的固定轴;所述涵道通过连接板与上中心体固定相连,并且涵道的内壁上还固定连接有行走动力源;所述无人机还包括共轴双旋翼以及下中心体;所述下中心体通过固定轴与上中心体固定相连;所述下中心体的侧壁上还设有若干舵面。使得无人机具备了在空中、水中和陆上三种环境下跨介质执行任务的能力,提高了无人机的环境适应能力和工作灵活性。应能力和工作灵活性。应能力和工作灵活性。
技术研发人员:尹乔之 孙浩 魏小辉 倪鑫磊 聂宏 宋佳翼
受保护的技术使用者:南京航空航天大学
技术研发日:2022.06.08
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。