技术特征:
1.一种步态可转变的仿生机器人,其特征在于:包括躯干、尾部平衡机构、两个调节装置和四个肢腿;四个肢腿分为左前肢、左后肢、右前肢和右后肢,对称固定在躯干两侧,尾部平衡机构固定在躯干后端面,两个调节装置设置在躯干的两端,每个调节装置两侧分别连接一个肢腿;尾部平衡机构利用一个旋转姿态舵机和三个摆动姿态舵机的控制实现尾部调节,提升整个机器人的稳定性。2.根据权利要求1所述的步态可转变的仿生机器人,其特征在于:躯干包括自前向后依次连接的前箱体(13)、后箱体(14)和柱状连接件(15),前箱体(13)和后箱体(14)外分别设有一个调节装置,左前肢和右前肢连接在前箱体(14)两侧,左后肢和右后肢连接在后箱体(14)两侧。3.根据权利要求2所述的步态可转变的仿生机器人,其特征在于:所述调节装置包括传动轴(1)、曲柄(2)和棘轮(3),传动轴(1)两端通过轴承与箱体连接,且传动轴(1)垂直于柱状连接件(15)的中心轴线方向设置,传动轴(1)一端伸出箱体后连接棘轮(3),在棘轮(3)的外轮上设有凸起,用于连接肢腿,传动轴(1)另一端伸出箱体后通过曲柄(2)连接肢腿。4.根据权利要求3所述的步态可转变的仿生机器人,其特征在于:两个调节装置中的棘轮(3)位于同一侧。5.根据权利要求3所述的步态可转变的仿生机器人,其特征在于:棘轮(3)的棘轮拨个数为n,机构最小控制角度受限于棘轮拨个数,其关系为最小控制角度φ=360
°
/n。6.根据权利要求4所述的步态可转变的仿生机器人,其特征在于:肢腿包括四杆机构、液压缸(8)、球型接头(9)、足(10),四杆机构一端连接液压缸(8),液压缸(8)再与球型接头(9)连接,球型接头(9)另一端与足(10)转动连接,液压缸(8)在跳跃步态中用以辅助仿生机器人跳起的动作;通过同侧设置的两个棘轮(3),实现左右肢行进中的角度差,继而实现步态的转变。7.根据权利要求6所述的步态可转变的仿生机器人,其特征在于:上述四杆机构采用一端固定、另一端不固定的平面四杆机构,自由度为2。8.根据权利要求7所述的步态可转变的仿生机器人,其特征在于:尾部平衡机构包括旋转姿态舵机、m个连杆和m 1个摆动姿态舵机,旋转姿态舵机通过固定架与后箱体(15)的后端面固连,旋转姿态舵机的输出轴通过连接件(18)、第三连杆件(30)、舵机连接件(31)连接第一个摆动姿态舵机,相邻两个摆动姿态舵机之间通过连杆连接,摆动姿态舵机实现连杆的上下摆动。
技术总结
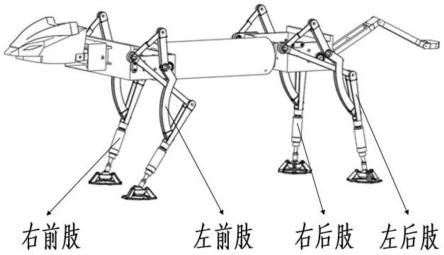
本发明公开了一种步态可转变的仿生机器人,包括躯干、尾部平衡机构、两个调节装置和四个肢腿。两个调节装置分别连接于躯干的前后箱体上,由传动轴、曲柄和棘轮组成;四个肢腿连接在调节装置上,由右前肢,左前肢,右后肢,左后肢组成;尾部平衡机构垂直于后箱体后表面与躯干连接,有一个旋转姿态舵机和三个摆动姿态舵机及若干连杆组成。本发明利用调节部分可实现前后仅两伺服电机的情况下实现前后肢的走、跑、跳的步态转换;利用尾部四个舵机的控制实现尾部旋转和摆动的调节,提升整个机器人的稳定性。定性。定性。
技术研发人员:潘明辉 李玉超 孙思远 吴宽宇 范元勋 宋梅利
受保护的技术使用者:南京理工大学
技术研发日:2022.04.27
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。