1.本实用新型涉及3d打印技术领域,尤其涉及一种基于自由度释放机构的移动梁双动力驱动系统。
背景技术:
2.3d打印技术又称快速成型制造技术,其基本原理是将一定厚度的材料反复打印在平台上,循环往复,直到生成整个成型件。3d打印工艺工程是先利用三维造型软件创建三维实体造型,再将设计出的实体造型通过快速成型设备的处理软件进行离散与分层,然后将处理过的数据输入设备进行制造,最后还需要进行一定的后处理以得到最终的成品。3d打印技术发展到今天,其发展重心已从3d打印原型向快速制造及金属零部件的快速直接制造方向转移。3d打印技术不仅应用于设计过程,而且也延伸到制造领域。在制造业中,限制产品推向市场时间的主要因素是模具及模型的设计制造时间,3d打印是快速设计的辅助手段。
3.目前,国内现有的3d设备在打印过程中,大多采用打印梁和铺砂(粉)梁各自进行运动的导向,用直线模组的方式或直线滑轨叠加同步皮带的方式作为驱动装置,即打印梁和铺砂(粉)梁运动所需的直线滑轨是分开的、二者独立的。而少数较为先进的设计是采用共轨式驱动系统,此系统会采用直线电机作为驱动,比如授权公布号为cn216153059u的中国专利公开了一种应用于桌面型3d打印机的直线电机驱动结构,包括x方向驱动结构、y方向驱动结构以及挤出机;x方向驱动结构包括x方向底座、x方向直线电机线圈、x方向直线电机磁铁、x方向导轨滑块组件和x方向编码器读头及x方向光栅尺;x方向导轨滑块组件包括x方向导轨和x方向滑块;x方向导轨包括x方向内侧导轨和x方向外侧导轨;x方向滑块包括x方向内侧滑块和x方向外侧滑块;y方向驱动结构包括y方向底座、y方向直线电机线圈、y方向直线电机磁铁、y方向编码器读头及y方向光栅尺组成;挤出机固定在y方向驱动结构上。
4.当采用上述直线电机驱动结构时,在打印梁(或铺砂梁)两端双动力驱动的情况下,由于设备本身精度高,刚性好,导致在两端直线电机动力输出微微不同步的情况下,打印梁(铺砂梁)两端所受到的驱动力有所差异,从而使打印梁(铺砂梁)所连接的直线滑轨的运动副受到很大的侧向力,使摩擦力大大增加。因此,该运动副的工况非常恶劣,严重影响直线滑轨的使用寿命,甚至所需的驱动力将超过直线电机额定负载的数倍。
技术实现要素:
5.本实用新型提供了一种基于自由度释放机构的移动梁双动力驱动系统,以解决移动梁两端驱动不同步引起的驱动力差异所导致的直线滑轨受到的侧向力大,严重影响直线滑轨实用寿命,导致驱动力超过直线电机额定荷载等问题。
6.为解决上述技术问题,本实用新型提供的技术方案为:
7.本实用新型涉及的一种基于自由度释放机构的移动梁双动力驱动系统,其包括第一驱动梁、第二驱动梁和移动横梁,所述的移动横梁横跨于第一驱动梁和第二驱动梁之间,
所述的第一驱动梁上设有第一运动托板,第一运动托板与第一驱动梁滑动连接并由第一驱动梁驱动;所述的第二驱动梁上设有第二运动托板,第二运动托板与第二驱动梁滑动连接并由第二驱动梁驱动;所述的移动横梁的一端通过第一自由度释放机构与第一运动托板连接,使得移动横梁的一端能够在第一运动托板上旋转和平移;所述的移动横梁的另一端通过第二自由度释放机构与第二运动托板连接,使得移动横梁的另一端能够在第二运动托板上旋转。
8.优选地,所述的第一自由度释放机构包括第一旋转轴承和导轨,第一旋转轴承的外圈固定于第一运动托板的上表面,导轨固定于第一旋转轴承的内圈的上表面,移动横梁的一端与导轨滑动连接。
9.优选地,所述的导轨包括滑动座和滑动块,滑动座与第一旋转轴承的内圈固定,滑动块与滑动座滑动连接,移动横梁的端部固定于滑动块上。
10.优选地,所述的滑动座和滑动块之间设有滑动轨道。
11.优选地,所述的第二自由度释放机构包括第二旋转轴承和垫高块,第二旋转轴承的外圈固定于第二运动托板的上表面,垫高块固定于第二旋转轴承的内圈的上表面,移动横梁的另一端固定在垫高块的上表面。
12.优选,所述的垫高块的高度与导轨的高度相同。
13.优选地,所述的移动横梁的两端均设有安装底板,移动横梁一端的安装底板通过螺丝与导轨连接,移动横梁另一端的安装底板通过螺丝与垫高块连接。
14.优选地,所述的第一驱动梁和所述的第二驱动梁的顶面均设有直线滑轨和直线驱动电机;所述的第一运动托板与第一驱动梁上的直线滑轨滑动连接且由第一驱动梁上的直线驱动电机驱动;所述的第二运动托板与第二驱动梁上的直线滑轨滑动连接且由第二驱动梁上的直线驱动电机驱动。
15.采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
16.本实用新型涉及的自由度释放机构的移动梁双动力驱动系统将移动横梁的两端固定在第一运动托板和第二运动托板,移动横梁的一端通过第一自由度释放机构与第一运动托板连接,移动横梁的另一端通过第二自由度释放机构与第二运动托板连接,进而使得移动横梁获得旋转的自由度,当移动横梁两端的所受到驱动力存在差异时,移动横梁靠近第一自由度释放机构的一端发生旋转和自由滑动,移动横梁靠近第二自由度释放机构的一端发生旋转,移动横梁顺利实现旋转,释放了因为两个直线电机输出不同步产生的不平衡力,以抵消驱动梁上的直线滑轨运动副受到侧向力,进而延长直线滑轨的使用寿命。
附图说明
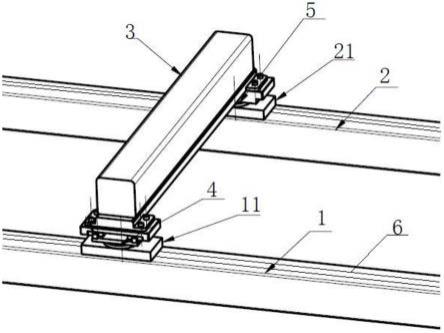
17.图1是基于自由度释放机构的移动梁双动力驱动系统的立体图;
18.图2是移动横梁和第一驱动梁的连接节点示意图;
19.图3是移动横梁和第一驱动梁的连接节点的剖视图;
20.图4是移动横梁和第二驱动梁的连接节点示意图;
21.图5是基于自由度释放机构的移动梁双动力驱动系统的使用状态图。
22.图示说明:1-第一驱动梁,11-第一运动托板,2-第二驱动梁,21-第二运动托板,3-移动横梁,31-安装底板,4-第一自由度释放机构,41-第一旋转轴承,42-导轨,421-滑动座,
4211-滑动轨道,5-第二自由度释放机构,51-第二旋转轴承,52-垫高块,6-直线滑轨。
具体实施方式
23.为进一步了解本实用新型的内容,结合实施例对本实用新型作详细描述,以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
24.参照附图1所示,本实用新型涉及的一种基于自由度释放机构的移动梁双动力驱动系统包括第一驱动梁1、第二驱动梁2和移动横梁3。所述的第一驱动梁1和第二驱动梁2的顶面均设有直线滑轨6和直线驱动电机(图中未画出);所述的第一驱动梁1上设有第一运动托板11,第一运动托板11与第一驱动梁1上的直线滑轨6滑动连接并由第一驱动梁1上的直线驱动电机驱动;所述的第二驱动梁2上设有第二运动托板21,第二运动托板21与第二驱动梁2上的直线滑轨6滑动连接并由第二驱动梁2上的直线驱动电机驱动。所述的移动横梁3横跨于第一驱动梁1和第二驱动梁2之间,移动横梁3的一端通过第一自由度释放机构4与第一运动托板11连接,使得移动横梁3的一端能够在第一运动托板11上旋转和平移;所述的移动横梁3的另一端通过第二自由度释放机构5与第二运动托板21连接,使得移动横梁3的另一端能够在第二运动托板21上旋转。
25.参照附图2所示,上述的第一自由度释放机构4包括第一旋转轴承41和导轨42,第一旋转轴承41的外圈固定于第一运动托板11的上表面,导轨42固定于第一旋转轴承41的内圈的上表面。参照附图3所示,所述的导轨42包括滑动座421和滑动块422,滑动座421与第一旋转轴承41的内圈固定,滑动座421的顶面设有滑动轨道4211,使得滑动块422与滑动座421滑动连接,所述的移动横梁3的端部通过一块安装底板31固定于滑动块422上。
26.参照附图4所示,所述的第二自由度释放机构5包括第二旋转轴承51和垫高块52,第二旋转轴承51的外圈固定于第二运动托板21的上表面,垫高块52固定于第二旋转轴承51的内圈的上表面,移动横梁3的另一端通过连接底板31固定在垫高块52的上表面;所述的垫高块52的高度与导轨42的高度相同,用于匹配导轨42,使得移动横梁3处于水平状态。
27.上述的移动横梁3可以是打印梁,也可以是铺砂梁。
28.参照附图5所示,采用上述基于自由度释放机构的移动梁双动力驱动系统的驱动方法,其具体步骤为:所述的第一驱动梁1上的直线电机驱动第一运动托板11沿着第一驱动梁1上的直线滑轨6移动,第二驱动梁2上的直线电机同步驱动第二运动托板21向第一运动托板11移动的方向移动,进而使得移动横梁3移动。然而在打印设备实际运行的过程中,移动横梁3两端的直线电机往往存在输出动力微微不同步的情况,当移动横梁两端所受到的驱动力存在差异时,所述的移动横梁3靠近第二自由度释放机构5的一端发生自由旋转,旋转一定的轻微角度,移动横梁3靠近第一自由度释放机构4的一端发生旋转和自由滑动,滑动是为了可以补偿因转动错位所需的滑动位移,进而使得移动横梁释放了因为两端直线电机驱动的不同步而产生的直线导轨运动副处的额外侧向力,使直线导轨的工况得到很大改善,非常有利于延长直线导轨的使用寿命;也保证了直线电机能够正常工作,不会因此过载。
29.以上结合实施例对本实用新型进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍属于本实用新型的专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。