稳定设备
发明领域
1.本发明涉及用于涂覆铁磁性材料扁平产品(例如,金属条带,特别是钢条带)的设施领域。更详细地,本发明涉及稳定设备,该稳定设备在用熔融金属进行的涂覆过程(例如电镀过程)期间缓和由铁磁性材料制成的条带在运动中的振动和震荡并且修正其变形。本发明还涉及用熔融金属涂覆金属条带的设施,该设施包括所述稳定设备。
现有技术
2.众所周知,由铁磁性材料制成的条带借助多种涂覆过程(例如通过电镀)在外部被涂覆。
3.包含熔融金属(例如锌)的罐上方的气刀区是涂覆过程的核心,并且影响设施可用性、工艺生产率、产品质量和锌的消耗。
4.在这种涂覆过程中,移动的金属条带通常受到变形和振动,通过使用电磁稳定器装置来修正变形和振动,以提高工艺生产率并且优化锌的消耗。
5.实际上,这种电磁稳定器装置可以减小气刀区中的条带振动的振幅,同时通过减小静态形状缺陷(诸如横向弯曲)的幅度来改善条带的形状。
6.例如,图1和图2示意性地示出了稳定器设备,其中电磁稳定器装置2被安装在相同的支撑梁3上,支撑梁3支撑相应的位于下方的气刀1。这种构造具有的优点在于,允许在条带上的空气射流的冲击区和条带稳定区之间的短距离,并且因此在控制气刀1下游的条带的振动和形状方面有好的效果。
7.然而,这种构造具有几个缺点:
[0008]-支撑梁大,因为它必须支撑气刀的重量和电磁稳定器装置的重量;
[0009]-构造复杂,并因此对投资成本有显著影响;
[0010]-移除气刀以对其进行维护的程序复杂;
[0011]-在通过添加稳定器来对仅具有气刀的设施进行现代化改造的情况下,也必须对气刀及其移动系统进行干预。
[0012]
因此,需要通过实现创造性的稳定设备构造来解决上述缺点。
[0013]
发明概述
[0014]
本发明的目的是制造一种用于稳定从熔融金属浴中上升的金属条带的稳定设备,该设备非常简单且紧凑。
[0015]
本发明的另一个目的是制造一种稳定设备,该稳定设备具有这样一种结构,以改进气刀关于条带上涂层厚度的精度的性能。
[0016]
本发明的另一个目的是制造一种具有低投资成本影响的稳定设备。
[0017]
本发明的另一个目的是制造一种稳定设备,该稳定设备便于在气刀和电磁装置上进行维护操作,最小化提升操作的次数,并且消除从旧的气刀上拆卸稳定装置以将其重新组装在新的气刀组上的需要。
[0018]
本发明借助一种用于稳定沿着理论进料平面x从熔融金属浴中上升的金属条带的
稳定设备,实现了这些目的中的至少一个和鉴于本描述将明显的其他目的,该设备包括:
[0019]-至少一对气刀,第一气刀相对于所述理论进料平面x被布置在第一侧,并且第二气刀被布置在与第一侧相对的第二侧;
[0020]-至少一对电磁稳定器装置,第一电磁稳定器装置被布置在所述第一侧,并且第二电磁稳定器装置被布置在所述第二侧;
[0021]-一对第一支撑梁,每个第一支撑梁支撑相应的气刀;
[0022]-一对第二支撑梁,每个第二支撑梁支撑相应的电磁稳定器装置;
[0023]
其中一对第二支撑梁不同于一对第一支撑梁,并且其中第一支撑梁远离理论进料平面x,而第二支撑梁靠近所述理论进料平面x并且被布置在至少部分地位于一对第一支撑梁内部的位置。
[0024]
本发明的另一方面涉及一种用熔融金属层涂覆金属条带的设施,该设施包括上述稳定设备,该稳定设备被放置在适合于包含熔融金属浴的罐的上方。
[0025]
有利地,电磁稳定器的两个支撑梁和气刀的两个支撑梁都不相连结地安装在横向于所述四个支撑梁的两个侧结构上,并且允许在开始操作阶段之前提升或降低气刀和电磁稳定器装置两者。这可以获得电磁稳定器装置和气刀关于线的工艺参数(条带速度和涂层厚度)的整体移动以及条带位置的平行度的可能修正。
[0026]
同时,在维护步骤中,这种不相连结的组件允许电磁稳定器的支撑梁和气刀的支撑梁被单独地提升,例如借助于起重机。
[0027]
维护按以下顺序执行:
[0028]-从两个侧结构中首先拆卸和提升电磁稳定器装置的支撑梁,并然后拆卸和提升气刀的支撑梁;
[0029]-首先重新组装气刀的支撑梁,并然后重新组装电磁稳定器装置的支撑梁。
[0030]
此外,本发明的设备构造可以避免作为由电磁装置生成的力的反作用而产生的应力被释放到气刀的支撑梁上,该应力对气刀关于涂层厚度精度的性能具有明显负面的影响。实际上,由电磁装置生成的应力被释放在它们相应的支撑梁上,这些支撑梁与气刀的支撑梁不相连结。
[0031]
电磁装置的支撑梁又在其端部处被约束至所述两个侧结构,这确保了其高刚性。
[0032]
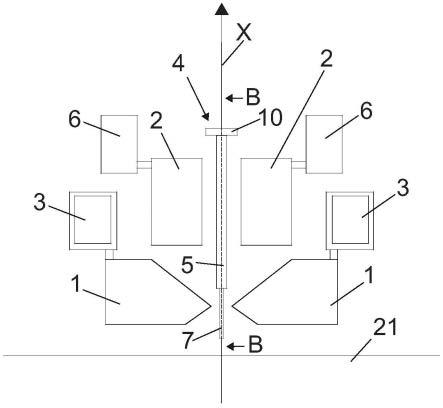
此外,为了进一步增加电磁装置的支撑梁的刚性,可以在操作者侧和马达侧提供这些梁之间的连接系统,以形成一种框架,该框架增加稳定组的弯曲刚度,并且优选地也增加空气射流的挡板系统的弯曲刚度。
[0033]
另一个优点由变型展示,其中为了增加本发明的设备的紧凑性,气刀挡板系统在条带的边缘处可以由一个或更多个电磁稳定器装置的相同的第二支撑梁支撑,并且因此挡板系统的组件可以与至少一个电磁稳定器装置的组件集成在一起。
[0034]
特别地,第二支撑梁中的一个也支撑气刀挡板系统,该气刀挡板系统包括两个边缘挡板,每个边缘挡板用于条带的每个边缘。
[0035]
优选地,第二支撑梁被适当地成形以允许电磁稳定器装置从靠近条带进料平面的工作位置水平地移动至远离所述条带进料平面的搁置位置,同时保持设备的紧凑性。
[0036]
另一个优点由变型展示,其中气刀支撑梁被适当地成形,以尽可能最小化用于控制涂覆的空气射流冲击区和电磁稳定器之间的距离。
[0037]
特别地,气刀的支撑梁可以被成形为使得它们在前进条带的位置处的中心伸展部被放置成与进料平面有一定的距离,从而允许稳定器的壳体位于这两个中心伸展部之间的区域中。以这种方式,包含电磁致动器的壳体可以降低得尽可能接近气刀喷嘴。这样做是为了借助于电磁稳定器使控制条带的振动和形状的效果最大化。
[0038]
鉴于优选但非排他的实施例的详细描述,本发明的进一步特征和优点将变得更加明显。
[0039]
从属权利要求描述了本发明的特定实施例。
[0040]
附图简述
[0041]
本发明的描述参考附图,附图通过非限制性的示例提供,在附图中:
[0042]
图1是现有技术的稳定设备的示意性视图;
[0043]
图2是沿图1中的设备的平面a-a截取的侧视图;
[0044]
图3是根据本发明的稳定设备的示意性视图;
[0045]
图4是沿图3中的设备的平面b-b截取的侧视图;
[0046]
图5是根据本发明的稳定设备的顶视图;
[0047]
图6是根据本发明的稳定设备的实施例的截面图;
[0048]
图中相同的参考数字和字母表示相同的元件或部件。
[0049]
本发明的示例性实施例的描述
[0050]
参考附图示出了根据本发明的稳定设备的一些示例,该稳定设备适合于稳定沿理论进料平面x从熔融金属浴21(例如锌)上升的金属条带。
[0051]
在本发明的所有实施例中,稳定设备包括:
[0052]-至少一对气刀1,优选地仅一对气刀,其第一气刀被布置在理论进料平面x的第一侧,并且第二气刀被布置在所述理论进料平面x的与第一侧相对的第二侧;
[0053]-至少一对电磁稳定器装置2,优选仅一对电磁稳定器装置,其第一电磁稳定器装置被布置在所述第一侧,并且第二电磁稳定器装置被布置在所述第二侧;
[0054]-一对第一支撑梁3,每个第一支撑梁3支撑相应的气刀1;
[0055]-一对第二支撑梁6,每个第二支撑梁6支撑相应的电磁稳定器装置2。
[0056]
优选地,在设备的操作步骤中,每个气刀1相对于理论进料平面x被布置成另一个气刀1的镜像,即,气刀1相对于理论进料平面x对称地布置。类似地,每个电磁稳定器装置2相对于所述理论进料平面x被布置成另一个电磁稳定器装置2的镜像,即,电磁稳定器装置相对于所述理论进料平面x对称地布置。
[0057]
有利地,一对第二支撑梁6与一对第一支撑梁3是不同的,即分开的,第一支撑梁3远离理论进料平面x,而第二支撑梁6靠近所述理论进料平面x。第一支撑梁和第二支撑梁相互不同或分开的事实意味着第二支撑梁6不直接或间接地由相应的第一支撑梁3支撑。特别地,第二支撑梁6不搁置在第一支撑梁3上,也不以任何方式由第一支撑梁3支撑。这可以避免作为由电磁稳定器装置2生成的力的反作用而产生的应力被释放到气刀1的支撑梁3上,该应力对气刀1关于涂层厚度精度的性能具有明显负面的影响。实际上,由电磁稳定器装置2生成的应力被释放在与气刀1的支撑梁分开的各自相应的支撑梁6上。
[0058]
此外,第二支撑梁6可以关于理论进料平面x被布置在(相对于一对第一支撑梁3的)至少部分最内侧的位置或完全最内侧的位置。支撑梁的这种布置方式使得本发明的设
备比已知的解决方案更简单且更紧凑。
[0059]
特别地,第二支撑梁6可以平行于第一支撑梁3布置。
[0060]
例如参照图6,第二支撑梁6(仅其至少一部分)可以被布置在第一支撑梁3的上方。
[0061]
特别地,两个第一支撑梁3彼此不同并且分别被布置在所述理论进料平面x的所述第一侧和所述第二侧,优选地以相互呈镜面的方式布置,即,支撑梁3相对于所述理论进料平面x对称地定位;并且两个第二支撑梁6也彼此不同并且分别被布置在所述第一侧和所述第二侧,优选地相对于所述理论进料平面x以相互呈镜面的方式布置,即,支撑梁6相对于理论进料平面x对称地定位。
[0062]
为了进一步提高本发明设备的紧凑性,一个变型提出,用于空气射流(空气射流来自所述气刀1)的挡板系统4被布置在第二支撑梁6之间,被固定至所述第二支撑梁6中的至少一个,优选地仅一个,并且挡板系统4包括至少一对挡板7,每个挡板7在气刀的相应端部处放置在气刀1之间。挡板7具有降低由空气射流的干扰产生的噪声和使条带边缘的过度涂覆最小化的功能,特别是对于具有重涂层的低速条带。
[0063]
所述挡板系统4的一个特定实施例包括两个支撑件5,每个支撑件5被布置在垂直于理论进料平面x的平面y的相应一侧。
[0064]
两个支撑件5大体上是扁平的并且沿着理论进料平面x布置,优选地以相互呈镜面的方式布置,即,相对于平面y对称地布置。
[0065]
每个支撑件5,优选地为c形,具有下臂8和上臂9,下臂8设置有相应的挡板7,上臂9设置有用于检测条带的边缘的检测装置10(图4)。这样的检测装置10可以是例如光电池或相机类型的传感器。挡板7相对于平面y的距离可以基于从熔融金属浴中上升的条带的边缘的位置的检测来进行调节。两个挡板7之间的距离例如在500mm和2000mm之间。
[0066]
例如,两个支撑件5可以是沿第二支撑梁6中的一个平行于理论进料平面x可滑动的。每个挡板7的定位可以通过线性伺服致动器响应于来自条带边缘检测装置10的信号来执行。绝对式编码器可以被包括在伺服致动器中。
[0067]
在正常操作期间,条带和挡板之间没有接触。检测装置10可以在没有操作者介入的情况下通过空气幕帘保持清洁数周。随着所述条带从浴中上升,挡板7可以在条带上的焊缝到达时自动缩回。
[0068]
还可以包括竖直调节机构,以用于在操作期间调节挡板的高度,例如,从其初始参考位置起
±
20mm,因此最大调节为40mm。
[0069]
本发明的设备的一个变型提出,第一支撑梁3和第二支撑梁6都具有(图5):
[0070]-搁置于第一侧结构12上的第一端部3”、6”;
[0071]-搁置于第二侧结构13上的第二端部3”、6”,侧结构12、13优选地彼此平行并且平行于所述平面y。
[0072]
具体地,每个第一支撑梁3的第一端部3”与每个第二支撑梁6的第一端部6”不相连结地或独立地搁置于第一侧结构12上;并且每个第一支撑梁3的第二端部3”'以与每个第二支撑梁6的第二端部6”'不相连结或独立的方式搁置于第二侧向结构13上。
[0073]
优选地,第一侧结构12和第二侧结构13具有相应的竖直移动装置,可选地相互同步,以便一起提升或降低第一支撑梁3和第二支撑梁6。这种竖直移动装置包括例如液压、气动或机械的致动器。
[0074]
例如,竖直移动可以通过机械千斤顶由2.2kw的ac齿轮马达提供动力。
[0075]
这种竖直移动可以在与下方的罐中的熔融金属的标称水平相距70mm和700mm之间。竖直移动速度例如约为380mm/min-420mm/min。
[0076]
有利地,第一支撑梁3具有在底部处支撑相应气刀1的相应的中心伸展部3',所述中心伸展部3'相对于理论进料平面x在最外侧,并且相对于第一支撑梁3的相应的第一端部3”和第二端部3”'降低(图6)。另外,第二支撑梁6具有相对于理论进料平面x在最外侧的相应的中心伸展部6',并且优选地相对于第二支撑梁6的相应的第一端部6”和第二端部6”'降低。每个中心伸展部6'(从其近侧到理论进料平面x)界定对应的第二支撑梁6的凹部。第一支撑梁3的中心伸展部3'有利地被布置成与理论进料平面x有一定的距离,以便允许电磁稳定器装置2容纳在所述两个中心伸展部3'之间的区域中。
[0077]
优选地,将第一端部3”或第二端部3”'与中心伸展部3'连结的中间梁伸展部至少部分地是曲线的,优选地限定具有两个拐点的轴线,或者可以是垂直于相应的第一支撑梁3的端部和中心伸展部的中间梁伸展部。
[0078]
替代地,将第一端部6”或第二端部6”'与中心伸展部6'连结的中间梁伸展部除了刚才针对第一支撑梁3的中间梁伸展部描述的之外,还可以具有部分60,部分60横向于,优选地正交于,中心伸展部6'并且与所述中心伸展部6'一起限定电磁稳定装置2定位在其中的凹部。
[0079]
每个电磁稳定器装置2优选地至少部分地被布置在相应的第二支撑梁6的凹部内。可选地,滑动导轨11(图5)被设置在所述凹部中,优选地被设置在所述凹部的端部处,以用于对应的电磁稳定器装置2沿着垂直于理论进料平面x的方向从工作位置滑动到搁置位置,或者反之亦然。
[0080]
在靠近条带的进料平面x的工作位置中,电磁稳定器装置2例如与条带的表面并且因此与进料平面有40mm至60mm的距离。替代地,在远离条带进料平面x的搁置位置中,电磁稳定器装置2例如与条带的表面并且因此与进料平面有100mm至250mm的距离。
[0081]
在一个有利的实施例(图6)中,每个第二支撑梁6的中心伸展部6'被布置在相应的第一支撑梁3的中心伸展部3'附近,位于所述中心伸展部3'的上方的位置,并且优选地相对于所述中心伸展部3'至少部分地在最内侧,或者完全在最内侧,使得被容纳在对应的支撑梁6的凹部中的相应的电磁稳定器装置2可以靠近下方的对应的气刀1。
[0082]
例如参照图6,第二支撑梁6仅部分地被布置在第一支撑梁3的上方。特别地,每个第二支撑梁6的中心伸展部6'被布置在对应的第一支撑梁3的中心伸展部3'的上方。
[0083]
每个电磁稳定器装置2可以延伸至相应的第二支撑梁6的凹部下方,优选地延伸至对应的第一支撑梁3的中心伸展部3'的下方,使得电磁稳定器装置2和下方的气刀1之间的距离被包括在200mm和1500mm之间,优选地在200mm和1000mm之间。
[0084]
优选地,每个中心伸展部6'被布置在比第一支撑梁3的第一端部3”和第二端部3”'的上边缘的高度更低的高度处。
[0085]
在本发明的设备的另一实施例中,第一支撑梁3的第一端部3”和第二端部3”'都搁置于相应的滑动导轨14、15上,滑动导轨14、15垂直于理论进料平面x,并且分别被设置在第一侧结构12和第二侧结构13上,使得第一支撑梁3可以在所述滑动导轨14、15上滑动,以调节两个气刀1之间的距离(图5)。
[0086]
第一支撑梁3的这种水平移动可以通过单独的步进马达提供动力。传动装置可以包括精密滚珠丝杠和线性导轨14、15。
[0087]
支撑梁3的这种水平移动可以相对于它们的初始参考位置在-20mm(在支撑梁3接近条带的进料平面的情况下)和 100mm(在支撑梁3远离所述进料平面移动的情况下)之间。
[0088]
条带进料平面(通过线)可以沿平面y水平移动
±
25mm。
[0089]
第一支撑梁3可以调节成相对于水平面平行或倾斜。
[0090]
在从熔融金属浴中上升的条带中存在的焊缝通过时,可以提供第一支撑梁3的水平快速打开特征,并且因此提供气刀1的水平快速打开特征。在这种情况下,水平移动速度例如是大约每100mm冲程2秒-4秒。
[0091]
至少一个线性换能器可以提供给所有的马达,无论是竖直移动的马达还是水平移动的马达。
[0092]
如果条带的通过线相对于设计位置,即,相对于理论进料平面移位,随后气刀1沿着所述滑动导轨14、15运动,以保持气刀相对于实际进料平面的对称性,该实际进料平面相对于所述理论进料平面x偏移,那么第二支撑梁6也借助于适当的机械系统进行自调节,以将所述第二支撑梁6相对于所述实际进料平面保持在镜面位置,即对称。
[0093]
优选地被放置在侧结构12、13内部,可选地位于包含滑动导轨14、15的平面下方的该机械系统(例如螺丝和/或杠杆的系统)还允许变型中的挡板7的位置的自调节,在该变型中空气射流(来自气刀1)的挡板系统4被布置在第二支撑梁6之间并且被固定至所述第二支撑梁6中的一个。
[0094]
本发明的另一变型提出,至少一个加强横向件16、17被设置在第二支撑梁6的第一端部6”和第二端部6”'处(图5)。每个加强横向件16、17都具有其第一端部和其第二端部,该第一端部可旋转地被约束至第二支撑梁6中的一个,该第二端部适合于与设置在第二支撑梁6中的另一个上的锁定装置18、19接合。这可以产生一种框架,其增加稳定组的弯曲刚度并且优选地还增加空气射流的挡板系统的弯曲刚度。
[0095]
如果一对第一支撑梁3和一对第二支撑梁6都需要借助起重机一起提升,则还可以提供连接装置20以将第一支撑梁3中的每一个连接至其附近的第二支撑梁6。
[0096]
在本发明的设备的所有实施例中,在包含熔融金属浴21的罐的正上方的气刀1借助加压空气射流调节条带表面上熔融金属涂层的厚度,以达到所需厚度的均匀涂层。
[0097]
通过首先使空气穿过一系列内部的、相互部分分开的腔室,每个气刀可以横跨喷嘴22(图4)的宽度产生均匀的空气射流,这些腔室具有接近喷嘴22相继变小的流动通道。通过每处受限通道迫使空气压力变得更加均匀。在喷嘴22的唇部的出口处,横跨整个宽度的压力分布是均匀的,为
±
1.5%或更小。
[0098]
作为示例:
[0099]-每个气刀入口处所需的最大压力约为850mbar-950mbar;
[0100]-每个气刀所需的最大空气流动速率在20℃下约为60nm3/min-65nm3/min;
[0101]-进给气刀的鼓风机的流动速率在20℃下约为65m3/min和145m3/min之间;
[0102]-每台鼓风机的装机功率约300kw。
[0103]
可以提供用于调节喷嘴22相对于理论进料平面x的角度的手动机构和/或用于调节喷嘴唇部之间的间隙的手动机构。
[0104]
优选地,平行于平面x测量的喷嘴22的开口宽度在1400mm-2000mm之间,例如1900mm。喷嘴唇部之间的间隙最大可达2.5mm,例如从1.0mm(在中部)到1.3mm(端部处)。喷嘴22相对于水平面的角度调节范围约为10
°
,例如从 3
°
到-7
°
。
[0105]
可以提供气动操作的自动喷嘴清洗装置22。
[0106]
在本发明的设备的所有实施例中,电磁稳定装置2可以减少条带振动,使条带变平(形状修正动作),并且在气刀1之间建立恒定的通过线。这使得条带上的锌涂层更加均匀,减少了锌涂层并且提高了产品质量。此外,这提高了生产率,除非存在由其他器具导致的限制,如用于稳定沉没辊或退火炉的浸没轴承。
[0107]
优选地,每个电磁稳定器装置2包括壳体,该壳体被定位在下方的气刀主体1的主体上方,尽可能靠近喷嘴22,以最大化磁稳定效果。所述壳体可以在内部封装多个磁致动器和涡流传感器;涡流传感器的电子器件;以及用于在导轨11上滑动的机械运动单元。每个装置2的磁致动器和涡流传感器与另一装置2的对应和相对的磁致动器和涡流传感器成对地操作。
[0108]
特别地,每个壳体中的机动移动机构可以允许相对于气刀主体并且相对于条带垂直地独立调节每个壳体的位置。
[0109]
每个壳体与条带的操作距离例如约为20mm,并且可以缩回到与条带的距离例如约70mm。稳定器装置2的水平移动的最大速度约为50mm/s。
[0110]
条带沿水平面与理论进料平面的最大偏差为
±
25mm,同时其倾角修正具有的最大值为1
°
。
[0111]
从熔融金属浴中上升的条带在两个空气冷却的壳体之间通过,这两个壳体容纳磁致动器和涡流传感器。壳体是专门设计的,以保护装置免受恶劣的环境、免受来自条带以及包含熔融金属浴的罐的热辐射。
[0112]
此外,稳定器装置2的电磁构造被限定为沿条带宽度施加空间上连续的磁力,而不是点状分布,以便提供最佳的平面度控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。