1.本实用新型涉及真空泵领域,具体而言,涉及一种罗茨泵转子及罗茨真空泵。
背景技术:
2.罗茨真空泵是指泵内装有两个相反方向同步旋转的叶形转子,可用于获得干燥、低污染的高真空环境、压缩洁净气体,在现代工业中有着广泛的应用,罗茨真空泵中的核心部件为两个转子,转子型线的选取决定了转子的结构,从而影响着泵的整体运行性能,对转子的优化设计也是设计与制造高性能罗茨泵的关键技术。
3.现有技术中,罗茨泵转子的转子截面积较大,其面积利用系数较低,造成罗茨真空泵的抽气速率较低。
技术实现要素:
4.本实用新型提供了一种罗茨泵转子及罗茨真空泵,其能够提高罗茨真空泵的抽气速率。
5.本实用新型的实施例可以这样实现:
6.本实用新型的实施例提供了一种罗茨泵转子,所述罗茨泵转子的转子型线包括:
7.多个依次首尾连接的基本曲线段l,其中,至少一个所述基本曲线段l包括依次连接的齿顶圆弧段l1、直线包络线l2、直线l3以及齿根圆弧段l4;
8.所述齿顶圆弧段l1的参数方程为:
9.x
l1
=r1cosθ1,y
l1
=r1sinθ1,其中,θ1∈(0.5π-a,0.5π),参数a为预设变量,r1为齿顶圆弧段的半径;
10.所述直线包络线l2的参数方程为:
11.x
l2
=a*sin(t) (a-d/(cos(t)))*cos(t)*sin(2*t);
12.y
l2
=a*cos(t) (a-d/(cos(t)))*cos(t)*cos(2*t),其中,a为两个转子型线的齿顶圆圆心间距的一半,t的范围为(0,1),d为直线l3到齿顶圆圆心的垂直距离;
13.所述直线l3的参数方程为:
14.y
l3
=kx
l3
,其中,k为预设斜率;
15.所述齿根圆弧段l4的参数方程为:
16.x
l4
=r2cosθ2,y
l4
=r2sinθ2,其中,θ2∈(0,b),参数b为预设变量,r2为齿根圆弧段的半径,r2小于r1且r2大于d。
17.可选地,所述罗茨泵转子的转子轴的半径r3小于所述齿根圆弧段的半径r2。
18.可选地,所述齿顶圆弧段l1及所述直线包络线l2的连接处设有第一弧形倒角段r1。
19.可选地,所述直线l3及所述齿根圆弧段l4的连接处设有第二弧形倒角段r2。
20.可选地,所述齿顶圆弧段l1所在的曲面用于贴合罗茨真空泵的腔体内壁。
21.可选地,所述基本曲线段l的数目为6,以形成三叶型罗茨泵转子,所述齿根圆弧段
l4的长度小于所述齿顶圆弧段l1的长度。
22.可选地,所述基本曲线段l的数目为8。
23.可选地,所述基本曲线段l的数目为10,所述齿根圆弧段l4的长度大于所述齿顶圆弧段l1的长度。
24.可选地,所述直线l3到所述齿顶圆圆心的垂直距离d大于所述罗茨泵转子的转子轴的半径r3。
25.本实用新型的实施例还提供了一种罗茨真空泵,包括腔体以及两个上述的罗茨泵转子;
26.两个所述罗茨泵转子相互啮合,且安装于所述腔体内,其中一个所述罗茨泵转子的齿顶圆弧段l1及所述直线l3分别用于啮合另一个所述罗茨泵转子的所述齿根圆弧段l4及所述直线包络线l2。
27.本实用新型实施例的罗茨泵转子及罗茨真空泵的有益效果包括,例如:
28.本实用新型的实施例提供了一种罗茨泵转子,罗茨泵转子的转子型线包括:多个依次首尾连接的基本曲线段l,其中,至少一个基本曲线段l包括依次连接的齿顶圆弧段l1、直线包络线l2、直线l3以及齿根圆弧段l4;例如四个依次首尾连接的相同的基本曲线段l形成双叶型罗茨泵转子,在两个转子中心距以及齿顶圆相同情况下,本实用新型中提供的罗茨泵转子比圆弧包络线转子的转子截面积更小,提高了面积利用系数,进而提高了罗茨真空泵的抽气速率,此外,本实用新型中提供的罗茨泵转子的中部转子型线向外突出的齿根圆弧段,相对现有技术中的圆弧包络线转子的中部转子型线为向内凹的弧线端来说,其齿根圆处强度更高。
29.本实用新型的实施例还提供了一种罗茨真空泵,包括腔体以及两个上述的罗茨泵转子,两个罗茨泵转子相互啮合,且安装于腔体内,其中一个罗茨泵转子的齿顶圆弧段l1及直线l3分别用于啮合另一个罗茨泵转子的齿根圆弧段l4及直线包络线l2,提高了罗茨真空泵的抽气速率。
附图说明
30.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它相关的附图。
31.图1为本实用新型的实施例中提供的第一种双叶型罗茨泵转子的转子型线的示意图;
32.图2为本实用新型的实施例中提供的第一种双叶型罗茨泵转子的转子型线啮合示意图;
33.图3为本实用新型的实施例中提供的第二种双叶型罗茨泵转子的转子型线的示意图;
34.图4为本实用新型的实施例中提供的第二种双叶型罗茨泵转子的转子型线啮合示意图;
35.图5为本实用新型的实施例中提供的三叶型罗茨泵转子的转子型线的示意图;
36.图6为本实用新型的实施例中提供的三叶型罗茨泵转子的转子型线啮合示意图;
37.图7为本实用新型的实施例中提供的四叶型罗茨泵转子的转子型线的示意图;
38.图8为本实用新型的实施例中提供的四叶型罗茨泵转子的转子型线啮合示意图;
39.图9为本实用新型的实施例中提供的五叶型罗茨泵转子的转子型线的示意图;
40.图10为本实用新型的实施例中提供的五叶型罗茨泵转子的转子型线啮合示意图。
41.图标:100-腔体;200-罗茨泵转子;210-转子轴。
具体实施方式
42.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
43.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
44.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
45.在本实用新型的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
46.此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
47.需要说明的是,在不冲突的情况下,本实用新型的实施例中的特征可以相互结合。
48.罗茨真空泵是指泵内装有两个相反方向同步旋转的叶形转子,可用于获得干燥、低污染的高真空环境、压缩洁净气体,在现代工业中有着广泛的应用,罗茨真空泵中的核心部件为两个转子,转子型线的选取决定了转子的结构,从而影响着泵的整体运行性能,对转子的优化设计也是设计与制造高性能罗茨泵的关键技术。现有技术中,罗茨泵转子的转子截面积较大,其面积利用系数较低,造成罗茨真空泵的抽气速率较低。本实用新型的实施例中提供的罗茨泵转子及罗茨真空泵可以解决这一问题。
49.请参考图1-图10,本实施例提供了一种罗茨泵转子200及罗茨真空泵,接下来将对其进行详细的描述。
50.请先参考图1和图2,本实用新型的实施例中提供了一种罗茨真空泵,其包括腔体100以及两个罗茨泵转子200,该罗茨泵转子200为第一种罗茨泵转子200,两个罗茨泵转子200相互啮合,且安装于腔体100内,其能提高了面积利用系数,进而提高了罗茨真空泵的抽气速率。
51.该罗茨泵转子200的转子型线包括:多个依次首尾连接的基本曲线段l,其中,至少
一个基本曲线段l由齿顶圆弧段l1、直线包络线l2、直线l3以及齿根圆弧段l4,在本实施例中,四个依次首尾连接的相同的基本曲线段l形成完整的转子型线,得到双叶型罗茨泵转子。
52.其中一个罗茨泵转子200的齿顶圆弧段l1及直线l3分别用于啮合另一个罗茨泵转子200的齿根圆弧段l4及直线包络线l2。即,其中一个罗茨泵转子200的整个连续齿顶圆弧段(包含两段齿顶圆弧段l1)用于啮合另一个罗茨泵转子200的整个连续齿根圆弧段(包含两段齿根圆弧段l4)。
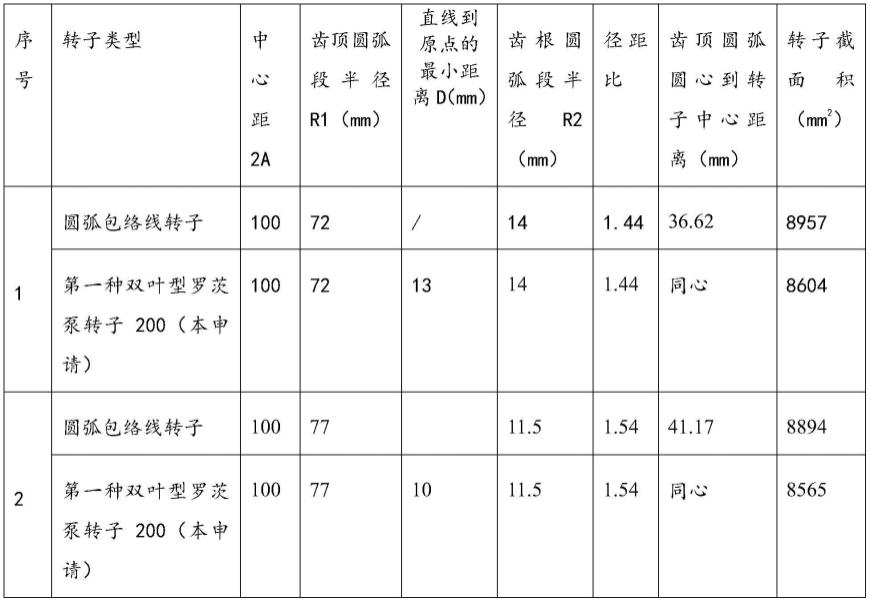
53.在两个转子中心距以及齿顶圆相同情况下,例如表1:
54.表1
[0055][0056][0057]
可以看出,本实用新型中提供的罗茨泵转子200比圆弧包络线转子的转子截面积更小,提高了面积利用系数,进而能够提高罗茨真空泵的抽气速率。
[0058]
此外,本实用新型中提供的罗茨泵转子200的中部转子型线向外突出的齿根圆弧段,相对现有技术中的圆弧包络线转子的中部转子型线为向内凹的弧线端来说,其齿根圆处强度更高。
[0059]
其中,齿顶圆弧段l1的参数方程为:
[0060]
x
l1
=r1cosθ1,y
l1
=r1sinθ1,其中,θ1∈(0.5π-a,0.5π),参数a为预设变量,r1为齿顶圆弧段的半径,例如a为0.2π,r1直径为72mm;
[0061]
直线包络线l2的参数方程为:
[0062]
x
l2
=a*sin(t) (a-d/(cos(t)))*cos(t)*sin(2*t);
[0063]yl2
=a*cos(t) (a-d/(cos(t)))*cos(t)*cos(2*t),其中,a为两个转子型线的齿顶圆圆心间距的一半,t的范围为(0,1),d为直线l3到齿顶圆圆心的垂直距离,例如a为50mm,d为13mm;
[0064]
直线l3的参数方程为:
[0065]yl3
=kx
l3
,其中,k为预设斜率,例如预设斜率k可以为6;
[0066]
齿根圆弧段l4的参数方程为:
[0067]
x
l4
=r2cosθ2,y
l4
=r2sinθ2,其中,θ2∈(0,b),参数b为预设变量,r2为齿根圆弧段的半径,r2小于r1且r2大于d,直线l3到齿顶圆圆心的垂直距离d大于罗茨泵转子200的转子轴210的半径r3。例如b为0.15π,r2为14mm。其中,齿顶圆弧段l1所在的曲面用于贴合罗茨真空泵的腔体100内壁,这样齿顶圆弧段l1所在的圆弧面可以与腔体100内壁形成面密封,增大了密封面,罗茨真空泵的极限压力更好。
[0068]
请参考图3和图4,在其他实施例中,为了方便加工,罗茨泵转子200的齿顶圆弧段l1及直线包络线l2的连接处设有第一弧形倒角段r1,直线l3及齿根圆弧段l4的连接处设有第二弧形倒角段r2,该罗茨泵转子200为第二种双叶型罗茨泵转子200,此时,两个转子在啮合过程中,其中一个罗茨泵转子200的第一弧形倒角段r1用于啮合另一个罗茨泵转子200的第二弧形倒角段r2。
[0069]
在其他实施例中,请参考图5和图6,基本曲线段l的数目为6,以形成三叶型罗茨泵转子200,且齿根圆弧段l4的长度小于齿顶圆弧段l1的长度。
[0070]
请参考图7和图8,基本曲线段l的数目为8,以形成四叶型罗茨泵转子200。
[0071]
请参考图9和图10,基本曲线段l的数目为10,以形成五叶型罗茨泵转子200,其中,齿根圆弧段l4的长度大于齿顶圆弧段l1的长度。
[0072]
综上,该罗茨泵转子200的转子型线包括:多个依次首尾连接的基本曲线段l,其中,至少一个基本曲线段l由齿顶圆弧段l1、直线包络线l2、直线l3以及齿根圆弧段l4依次连接组成,在两个转子中心距以及齿顶圆相同情况下,本实用新型中提供的罗茨泵转子200比圆弧包络线转子的转子截面积更小,提高了面积利用系数,进而提高了罗茨真空泵的抽气速率,此外,本实用新型中提供的罗茨泵转子200的中部转子型线向外突出的齿根圆弧段,相对现有技术中的圆弧包络线转子的中部转子型线为向内凹的弧线端来说,其齿根圆处强度更高。
[0073]
该罗茨真空泵包括腔体100以及两个上述的罗茨泵转子200,两个罗茨泵转子200相互啮合,且安装于腔体100内,其中一个罗茨泵转子200的齿顶圆弧段l1及直线l3分别用于啮合另一个罗茨泵转子200的齿根圆弧段l4及直线包络线l2,提高了罗茨真空泵的抽气
速率。
[0074]
以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。