1.本实用新型涉及自动化生产设备技术领域,尤其是涉及一种能够对圆管进行准确旋转、旋转驱动稳定可靠、结构简单紧凑、生产效率高且降低生产成本的圆管焊接旋转装置。
背景技术:
2.在圆管焊接工序中,需要对圆管进行旋转,以便对圆管进行外周焊接。由于圆管较重,依靠人工徒手旋转非常困难,费时费力,另外圆管的外周面上存在锋利棱角,存在划伤人工手部的风险,人工长时间生产劳动强度极大,严重影响生产效率。
3.为了降低人工劳动强度,现有对圆管焊接翻转的支撑装置通过在基座部上设置有两个径向并排的托辊,并通过连接杆驱动托辊转动,从而使两个托辊之间的圆管发生转动进行焊接。但是,两个托辊与圆管之间的摩擦接触面积较小,使得圆管在两个托辊之间存在打滑现象,从而影响圆管旋转焊接的稳定性和可靠性,进而影响生产效率。
技术实现要素:
4.为了实现本实用新型的主要目的,本实用新型提供一种能够对圆管进行准确旋转、旋转驱动稳定可靠、结构简单紧凑、生产效率高且降低生产成本的圆管焊接旋转装置。
5.为了实现本实用新型的主要目的,本实用新型提供一种圆管焊接旋转装置,包括支撑架、第一转轮、第二转轮、旋转控制机构、第三转轮和第四转轮,第一转轮和第二转轮分别可旋转地支撑在支撑架上并在第一方向上并排设置,且第一转轮的第一旋转轴垂直于第一方向设置并与第二转轮的第二旋转轴平行设置,第三转轮和第四转轮分别可旋转地支撑在支撑架上并在第一方向上并排设置,且第三转轮的第三旋转轴垂直于第一方向设置并与第四转轮的第四旋转轴平行设置,第三转轮的第三旋转轴在第二方向上位于第一转轮的第一旋转轴的上方,第四转轮的第四旋转轴在第二方向上位于第二转轮的第二旋转轴的上方,且第一转轮、第二转轮、第三转轮和第四转轮均用于支撑圆管,第二方向与第一方向相互垂直设置,旋转控制机构设置在支撑架上并可控制第一转轮、第二转轮、第三转轮和第四转轮同步同向旋转。
6.从上述方案中可见,本实用新型圆管焊接旋转装置的旋转控制机构控制第一转轮、第二转轮、第三转轮和第四转轮同步同向旋转,从而同步驱动支撑在第一转轮、第二转轮、第三转轮和第四转轮之间的圆管旋转进行周向焊接。由于第一转轮和第二转轮在第一方向上并排设置,且第一转轮的第一旋转轴垂直于第一方向设置并与第二转轮的第二旋转轴平行设置,同时第三转轮和第四转轮在第一方向上并排设置,且第三转轮的第三旋转轴垂直于第一方向设置并与第四转轮的第四旋转轴平行设置,第三转轮的第三旋转轴在第二方向上位于第一转轮的第一旋转轴的上方,且第四转轮的第四旋转轴在第二方向上位于第二转轮的第二旋转轴的上方,第二方向与第一方向相互垂直设置,从而使得第一转轮、第二转轮、第三转轮和第四转轮之间形成v型限位区域,在第一转轮、第二转轮、第三转轮和第四
转轮同步同向旋转以驱动位于v型限位区域内的圆管旋转过程中,从而v型限位区域能够限制旋转的圆管稳定保持支撑在第一转轮、第二转轮、第三转轮和第四转轮之间,同时第一转轮、第二转轮、第三转轮和第四转轮能够有效增加与圆管之间的旋转驱动摩擦接触面积,避免圆管在旋转过程中出现打滑现象,并且第一转轮和第二转轮的驱动力对称作用在圆管的两侧,第三转轮和第四转轮的驱动力也对称作用在圆管的两侧,使得圆管的旋转稳定匀速,从而本实用新型圆管焊接旋转装置能够对圆管进行准确旋转,旋转驱动稳定可靠,并且结构简单紧凑,生产效率高,降低生产成本。
7.进一步的方案是,第三转轮的第三旋转轴在第一方向上位于第一转轮的第一旋转轴远离第二转轮的外侧;和/或,第四转轮的第四旋转轴在第一方向上位于第二转轮的第二旋转轴远离第一转轮的外侧。
8.进一步的方案是,第一转轮的外周套设有第一弹性环套;和/或,第二转轮的外周套设有第二弹性环套;和/或,第三转轮的外周套设有第三弹性环套;和/或,第四转轮的外周套设有第四弹性环套。
9.进一步的方案是,第一弹性环套的外周壁凸出设置有多个第一防滑凸条,多个第一防滑凸条在第一弹性环套的周向上均匀分布;和/或,第二弹性环套的外周壁凸出设置有多个第二防滑凸条,多个第二防滑凸条在第二弹性环套的周向上均匀分布;和/或,第三弹性环套的外周壁凸出设置有多个第三防滑凸条,多个第三防滑凸条在第三弹性环套的周向上均匀分布;和/或,第四弹性环套的外周壁凸出设置有多个第四防滑凸条,多个第四防滑凸条在第四弹性环套的周向上均匀分布。
10.进一步的方案是,圆管焊接旋转装置还包括第一转动杆、第二转动杆、第一同步轮、第二同步轮和第一同步带,第一转动杆和第二转动杆分别可旋转地支撑在支撑架上,第一转轮和第一同步轮分别套设在第一转动杆上,第三转轮和第二同步轮分别套设在第二转动杆上,且第一同步带套设在第一同步轮和第二同步轮之间,旋转控制机构可控制第一转动杆旋转。
11.进一步的方案是,圆管焊接旋转装置还包括第三转动杆、第四转动杆、第三同步轮、第四同步轮和第二同步带,第三转动杆和第四转动杆分别可旋转地支撑在支撑架上,第二转轮和第三同步轮分别套设在第三转动杆上,第四转轮和第四同步轮分别套设在第四转动杆上,且第二同步带套设在第三同步轮和第四同步轮之间,旋转控制机构可控制第三转动杆旋转。
12.进一步的方案是,圆管焊接旋转装置还包括第一张紧轮,第一张紧轮可旋转地支撑在支撑架上并在第一同步带的移动方向上位于第一同步轮和第二同步轮之间,且第一同步带可抵压在第一张紧轮的外周壁上;和/或,圆管焊接旋转装置还包括第二张紧轮,第二张紧轮可旋转地支撑在支撑架上并在第二同步带的移动方向上位于第三同步轮和第四同步轮之间,且第二同步带可抵压在第二张紧轮的外周壁上。
13.进一步的方案是,支撑架开设有第一腰型槽,第一腰型槽在垂直于第一同步带的移动方向上延伸,第一紧固件穿过第一腰型槽与第一张紧轮连接以将第一张紧轮可旋转地支撑在支撑架上;和/或,支撑架开设有第二腰型槽,第二腰型槽在垂直于第二同步带的移动方向上延伸,第二紧固件穿过第二腰型槽与第二张紧轮连接以将第二张紧轮可旋转地支撑在支撑架上。
14.进一步的方案是,旋转控制机构包括电机、链条、主动链轮、第一链轮和第二链轮,电机设置在支撑架上,主动链轮套设在电机的驱动轴上,第一链轮套设在第一转动杆上,第二链轮套设在第三转动杆上,链条套设在主动链轮、第一链轮和第二链轮之间。
15.进一步的方案是,旋转控制机构还包括张紧链轮,张紧链轮可旋转地支撑在支撑架上并在第一方向上位于第一链轮和第二链轮之间,且链条可抵压在张紧链轮的外周壁上。
16.进一步的方案是,支撑架开设有第三腰型槽,第三腰型槽在第一方向上延伸,或者第三腰型槽在第二方向上延伸,第三紧固件穿过第三腰型槽与张紧链轮连接以将张紧链轮可旋转地支撑在支撑架上。
附图说明
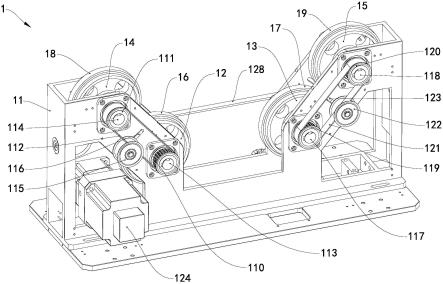
17.图1是本实用新型圆管焊接旋转装置实施例的第一视角结构图。
18.图2是本实用新型圆管焊接旋转装置实施例的第二视角结构图。
19.图3是本实用新型圆管焊接旋转装置实施例的分解图。
20.以下结合附图及实施例对本实用新型作进一步说明。
具体实施方式
21.参见图1至图3,本实施例圆管焊接旋转装置1包括支撑架11、第一转轮12、第二转轮13、旋转控制机构、第三转轮14和第四转轮15,第一转轮12和第二转轮13分别可旋转地支撑在支撑架11上并在第一方向上并排设置,且第一转轮12的第一旋转轴垂直于第一方向设置并与第二转轮13的第二旋转轴平行设置。其中,第三转轮14和第四转轮15分别可旋转地支撑在支撑架11上并在第一方向上并排设置,且第三转轮14的第三旋转轴垂直于第一方向设置并与第四转轮15的第四旋转轴平行设置。同时,第三转轮14的第三旋转轴在第二方向上位于第一转轮12的第一旋转轴的上方并在第一方向上位于第一转轮12的第一旋转轴远离第二转轮13的外侧,且第四转轮15的第四旋转轴在第二方向上位于第二转轮13的第二旋转轴的上方并在第一方向上位于第二转轮13的第二旋转轴远离第一转轮12的外侧。并且,第二方向与第一方向相互垂直设置,旋转控制机构设置在支撑架11上并可控制第一转轮12、第二转轮13、第三转轮14和第四转轮15同步同向旋转。优选的,第一转轮12、第二转轮13、第三转轮14和第四转轮15均与待焊接的圆管外周壁接触,即第一转轮12、第二转轮13、第三转轮14和第四转轮15均支撑待焊接的圆管。
22.本实施例圆管焊接旋转装置1的旋转控制机构控制第一转轮12、第二转轮13、第三转轮14和第四转轮15同步同向旋转,从而同步驱动支撑在第一转轮12、第二转轮13、第三转轮14和第四转轮15之间的圆管旋转进行周向焊接。由于第一转轮12和第二转轮13在第一方向上并排设置,且第一转轮12的第一旋转轴垂直于第一方向设置并与第二转轮13的第二旋转轴平行设置,同时第三转轮14和第四转轮15在第一方向上并排设置,且第三转轮14的第三旋转轴垂直于第一方向设置并与第四转轮15的第四旋转轴平行设置,第三转轮14的第三旋转轴在第二方向上位于第一转轮12的第一旋转轴的上方并在第一方向上位于第一转轮12的第一旋转轴远离第二转轮13的外侧,且第四转轮15的第四旋转轴在第二方向上位于第二转轮13的第二旋转轴的上方并在第一方向上位于第二转轮13的第二旋转轴远离第一转
轮12的外侧,第二方向与第一方向相互垂直设置,从而使得第一转轮12、第二转轮13、第三转轮14和第四转轮15之间形成v型限位区域,在第一转轮12、第二转轮13、第三转轮14和第四转轮15同步同向旋转以驱动位于v型限位区域内的圆管旋转过程中,从而v型限位区域能够限制旋转的圆管稳定保持支撑在第一转轮12、第二转轮13、第三转轮14和第四转轮15之间,同时第一转轮12、第二转轮13、第三转轮14和第四转轮15能够有效增加与圆管之间的旋转驱动摩擦接触面积,避免圆管在旋转过程中出现打滑现象,并且第一转轮12和第二转轮13的驱动力对称作用在圆管的两侧,第三转轮14和第四转轮15的驱动力也对称作用在圆管的两侧,使得圆管的旋转稳定匀速,从而本实施例圆管焊接旋转装置1能够对圆管进行准确旋转,旋转驱动稳定可靠,并且结构简单紧凑,生产效率高,降低生产成本。
23.为了提高作用在圆管上的旋转驱动摩擦力,以及避免对圆管造成损伤,本实施例第一转轮12的外周套设有第一弹性环套16,第二转轮13的外周套设有第二弹性环套17,第三转轮14的外周套设有第三弹性环套18,第四转轮15的外周套设有第四弹性环套19,则圆管支撑在第一弹性环套16、第二弹性环套17、第三弹性环套18和第四弹性环套19之间形成的v型限位区域内,弹性环套具有弹性变形能力,防止支撑圆管时对圆管的外周壁造成损伤,同时弹性环套与圆管的外周壁之间的黏性较大,从而能够有效提高作用在圆管上的旋转驱动摩擦力,使得圆管的旋转驱动更加稳定可靠。进一步地,本实施例第一弹性环套16的外周壁凸出设置有多个第一防滑凸条(未标示),多个第一防滑凸条在第一弹性环套16的周向上均匀分布,第二弹性环套17的外周壁凸出设置有多个第二防滑凸条(未标示),多个第二防滑凸条在第二弹性环套17的周向上均匀分布,第三弹性环套18的外周壁凸出设置有多个第三防滑凸条(未标示),多个第三防滑凸条在第三弹性环套18的周向上均匀分布,第四弹性环套19的外周壁凸出设置有多个第四防滑凸条(未标示),多个第四防滑凸条在第四弹性环套19的周向上均匀分布,从而圆管支撑在第一防滑凸条、第二防滑凸条、第三防滑凸条和第四防滑凸条之间形成的v型限位区域内,更进一步提高作用在圆管上的旋转驱动摩擦力,使得圆管的旋转驱动尤为稳定可靠。优选地,本实施例第一弹性环套16、第二弹性环套17、第三弹性环套18和第四弹性环套19均为橡胶环套。
24.为了确保第一转轮12、第二转轮13、第三转轮14和第四转轮15同步同向旋转的工作稳定性和可靠性,本实施例圆管焊接旋转装置1还包括第一转动杆113、第二转动杆114、第一同步轮110、第二同步轮111和第一同步带112,第一转动杆113和第二转动杆114分别可旋转地支撑在支撑架11上,第一转轮12和第一同步轮110分别套设在第一转动杆113上,第三转轮14和第二同步轮111分别套设在第二转动杆114上,且第一同步带112套设在第一同步轮110和第二同步轮111之间,旋转控制机构可控制第一转动杆113旋转,且本实施例圆管焊接旋转装置1还包括第三转动杆117、第四转动杆118、第三同步轮119、第四同步轮120和第二同步带121,第三转动杆117和第四转动杆118分别可旋转地支撑在支撑架11上,第二转轮13和第三同步轮119分别套设在第三转动杆117上,第四转轮15和第四同步轮120分别套设在第四转动杆118上,且第二同步带121套设在第三同步轮119和第四同步轮120之间,旋转控制机构可控制第三转动杆117旋转。
25.为了确保第一同步带112和第二同步带121的工作稳定性和可靠性,本实施例圆管焊接旋转装置1还包括第一张紧轮115,第一张紧轮115可旋转地支撑在支撑架11上并在第一同步带112的移动方向上位于第一同步轮110和第二同步轮111之间,且第一同步带112可
抵压在第一张紧轮115的外周壁上,且本实施例圆管焊接旋转装置1还包括第二张紧轮122,第二张紧轮122可旋转地支撑在支撑架11上并在第二同步带121的移动方向上位于第三同步轮119和第四同步轮120之间,且第二同步带121可抵压在第二张紧轮122的外周壁上。具体地,本实施例支撑架11开设有第一腰型槽116,第一腰型槽116在垂直于第一同步带112的移动方向上延伸,第一紧固件(未标示)穿过第一腰型槽116与第一张紧轮115连接以将第一张紧轮115可旋转地支撑在支撑架11上,能够对第一张紧轮115的位置进行调整,从而调整第一同步带112的松紧程度,进而提高第一同步带112的工作稳定性和可靠性。进一步地,本实施例支撑架11开设有第二腰型槽123,第二腰型槽123在垂直于第二同步带121的移动方向上延伸,第二紧固件(未标示)穿过第二腰型槽123与第二张紧轮122连接以将第二张紧轮122可旋转地支撑在支撑架11上,能够对第二张紧轮122的位置进行调整,从而调整第二同步带121的松紧程度,进而提高第二同步带121的工作稳定性和可靠性。
26.其中,本实施例旋转控制机构包括电机124、链条128、主动链轮125、第一链轮126和第二链轮127,电机124设置在支撑架11上,主动链轮125套设在电机124的驱动轴上,第一链轮126套设在第一转动杆113上,第二链轮127套设在第三转动杆117上,链条128套设在主动链轮125、第一链轮126和第二链轮127之间。电机124的驱动轴旋转同步带动主动链轮125旋转,主动链轮125通过链条128同步带动第一链轮126和第二链轮127旋转,第一链轮126通过第一转动杆113、第一同步轮110、第一同步带112、第二同步轮111、第二转动杆114同步带动第一转轮12和第三转轮14同步同向旋转,第二链轮127通过第三转动杆117、第三同步轮119、第二同步带121、第四同步轮120、第四转动杆118同步带动第二转轮13和第四转轮15同步同向旋转,从而使得第一转轮12、第二转轮13、第三转轮14和第四转轮15同步同向旋转,旋转驱动力的传递稳定可靠。
27.为了确保链条128的工作稳定性和可靠性,本实施例旋转控制机构还包括张紧链轮129,张紧链轮129可旋转地支撑在支撑架11上并在第一方向上位于第一链轮126和第二链轮127之间,且链条128可抵压在张紧链轮129的外周壁上。具体地,本实施例支撑架11开设有第三腰型槽130,第三腰型槽130在第一方向上延伸,或者第三腰型槽130在第二方向上延伸,第三紧固件2穿过第三腰型槽130与张紧链轮129连接以将张紧链轮129可旋转地支撑在支撑架11上,能够对张紧链轮129的位置进行调整,从而调整链条128的松紧程度,进而提高链条128的工作稳定性和可靠性。
28.以上实施例,只是本实用新型的较佳实例,并非来限制本实用新型实施范围,故凡依本实用新型申请专利范围的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型专利申请范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。