1.本实用新型属于矿用设备领域,尤其是涉及一种矿用巡检系统停靠站。
背景技术:
2.我国煤炭开采条件复杂,作业环境恶劣。传统的矿下作业检查,巡检人员要定期查看水泵等设备运行情况,矿下皮带运输机输送距离长,若发生故障,滚筒与传送带之间摩擦会产生的热量,容易起火,发生火灾,人工巡检效率低,存在安全隐患。针对上述现有问题种智能化矿用巡检机器人应运而生,而在矿用巡检机器人应用过程中,矿下使用环境较为复杂,在出现落石的情况下矿下机器人在巡检时不能紧急避险,而且巡检机器人在长时间运行时表面堆积灰尘容易造成散热不畅。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种矿用巡检系统停靠站,以解决现有技术的矿下机器人在巡检时不能紧急避险,以及长时间使用堆积灰尘造成散热不畅,使用寿命降低的问题。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.一种矿用巡检系统停靠站,包括外壳、顶升组件、清洗组件、对正单元和控制器,外壳为可折叠结构,外壳通过顶升组件打开,打开状态下,外壳一侧设置用于机器人进出的进站口,以使得机器人进入到外壳内防护并清洗;对正单元,与控制器连接,用于机器人的位置识别,以使得机器人在设定位置停止;清洗组件设在外壳内部,清洗组件包括喷气头和喷淋头,喷气头和喷淋头相互平行设置,且喷气头和喷淋头分别固定安装至外壳顶部内壁,喷气头通过气路连通至井下气源,喷淋头通过水路连通至井下水源,顶升组件信号连接至控制器。
6.进一步的,对正单元包括识别标签,识别标签设在外壳的内部,机器人上设有标签扫描器,当机器人行驶到识别标签并识别后停止。
7.进一步的,对正单元包括红外发射器和红外接收器,红外接收器固定安装至机器人上,红外发射器固定安装至外壳一侧,红外发射器信号连接至控制器。
8.进一步的,外壳包括架体、顶盖和底座,架体的横截面是u形结构,架体上端设置顶盖,架体下端设置底座,喷淋头和喷气头分别固定安装至顶盖下端,顶升组件设在底座上端的两侧,底座一侧设置红外发射器。
9.进一步的,架体包括第一壳体及其外围设置的第二壳体,第一壳体和第二壳体的横截面均为u形结构,第一壳体的外侧壁设有滑槽,第二壳体的内侧壁设置滑轨,滑轨的外围滑动连接至滑槽内,第一壳体外围还设置顶升组件,且顶升组件是推杆电机,顶升组件的外围固定连接至第一壳体外侧壁,顶升组件的活动杆固定连接至顶盖的下端,且第二壳体的上端固定连接至顶盖的下端,第一壳体下端设置底座。
10.进一步的,底座下端安装排污管,底座上端中部设有凹槽,排污管连通至凹槽。
11.进一步的,顶升组件是电液推杆或电动液压千斤顶。
12.进一步的,外壳内侧壁设置止停开关,止停开关信号连接至控制器,止停开关包括支板、滑杆和微动开关,第一壳体的内侧壁固定安装两个滑杆,且两个滑杆相互平行设置,支板上设有滑孔,且每个滑杆外围对应滑动连接至一个滑孔内,每个滑杆外围设置一个弹簧,弹簧的两端分别固定连接至第一壳体内侧壁、滑杆的一侧,滑杆的另一侧设置微动开关,微动开关信号连接至控制器。
13.相对于现有技术,本实用新型所述的矿用巡检系统停靠站具有以下有益效果:该停靠站用于矿用agv巡检车的停靠避险以及清洗,其结构简单,易于制作且制作成本低,同时该停靠站可实用不同规格的机器人使用,适用广泛,在矿下的复杂环境下通过避险、清扫能够提高机器人的使用寿命,提高设备的使用效率,降低维护成本。
附图说明
14.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
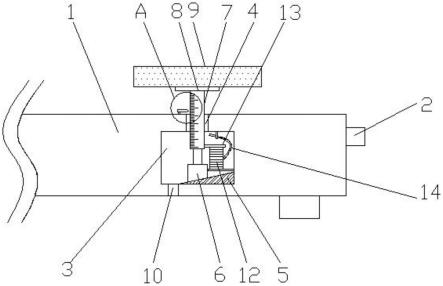
15.图1为本实用新型实施例所述的矿用巡检系统停靠站的结构示意图;
16.图2为本实用新型实施例所述的矿用巡检系统停靠站的下视图;
17.图3为本实用新型实施例所述的底座的结构示意图;
18.图4为本实用新型实施例所述的止停开关的结构示意图;
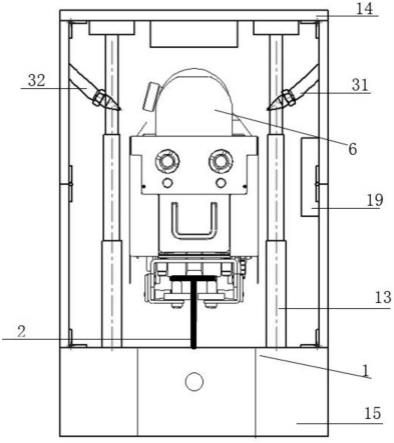
19.图5为本实用新型实施例所述的矿用巡检系统停靠站装配识别标签的结构示意图。
20.附图标记说明:
21.1-外壳;11-第一壳体;12-第二壳体;13-顶升组件;14-顶盖;15-底座;16-滑轨;17-凹槽;19-识别标签;2-承重轨道;21-承重盘;3-清洗组件;31-喷气头;32-喷淋头;4-红外发射器;5-止停开关;51-支板;52-滑杆;53-微动开关;54-弹簧;6-机器人。
具体实施方式
22.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
23.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
24.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地
连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
25.下面将参考附图并结合实施例来详细说明本实用新型。
26.如图1-4所示,矿用巡检系统停靠站,包括外壳1、清洗组件3、对正单元、止停开关5和控制器,外壳1一侧设置用于机器人进出的进站口,且本实施例的机器人为现有技术的矿用agv巡检车,外壳1底部设置用于顶升机器人的承重轨道2,外壳1内侧壁设置止停开关5,对正单元包括红外发射器4和红外接收器,红外接收器固定安装至机器人上,红外发射器4固定安装至外壳1一侧,且红外接收器和红外发射器4为现有技术,外壳1顶部设置清洗组件3,清洗组件3包括喷气头和喷淋头,喷气头和喷淋头相互平行设置,且喷气头和喷淋头分别固定安装至外壳1顶部内壁,喷气头通过气路连通至空压机,喷淋头通过水路连通至自来水,水路和气路上分别设置电磁阀,控制器包括plc,电磁阀、红外发射器4、止停开关5和承重轨道2分别信号连接至plc,plc串接现有技术天线,天线通过外部的wifi基站收发信号的,该停靠站用于矿用agv巡检车的停靠避险以及清洗,其结构简单,易于制作且制作成本低,同时该停靠站可实用不同规格的机器人使用,适用广泛,通过避险、清扫能够提高机器人的使用寿命,提高设备的使用效率,降低维护成本。
27.当机器人需要避险或清洗时发出避险信号,天线接收避险信号后控制器控制红外发射器4持续发射红外信号,机器人上的红外接收器接收红外信号并对正归为机器人与外壳1的相对位置,并缓慢驶入外壳1内部,当机器人碰触至止停开关5时,止停开关5信号输入控制器,控制器通过天线发送机器人止停指令,当机器人需要清洗时,控制器控制承重轨道2托起机器人,然后通过清洗组件3对机器人进行吹扫或水洗。
28.为了提高外壳1的适用性,外壳1具备收放功能,以确保外壳1适用不同型号的机器人,同时在未工作期间,将框架收缩,减少自身体积以提高停靠站的抗险能力,外壳1包括架体、顶盖14和底座15,架体的横截面是u形结构,架体上端设置顶盖14,架体下端设置底座15,架体内侧壁设置止停开关5,喷淋头和喷气头分别固定安装至顶盖14下端,底座15上端中部设置承重轨道2,底座15一侧设置红外发射器4,架体包括第一壳体11及其外围设置的第二壳体12,第一壳体11和第二壳体12的横截面均为u形结构,第一壳体11的外侧壁设有滑槽,第二壳体12的内侧壁设置滑轨16,滑轨16的外围滑动连接至滑槽内,第一壳体11外围还设置顶升组件13,且顶升组件13是推杆电机或现有技术的气动推杆,本实施例选用推杆电机,以便精确确定顶升组件13的伸缩量,顶升组件13的外围固定连接至第一壳体11外侧壁,顶升组件13的活动杆固定连接至顶盖14的下端,且第二壳体12的上端固定连接至顶盖14的下端,第一壳体11下端设置底座15。
29.底座15下端安装排污管,底座15上端中部设有凹槽17,排污管连通至凹槽17,承重轨道2是现有技术的电液推杆,电液推杆的活动杆上安装承重盘21以增加活动杆与机器人的接触面积,且承重轨道2安装至凹槽17内,在吹扫和喷淋清洗机器人时,灰尘或污水经凹槽17导流至排污管内,以确保停靠站内减少污染物。
30.止停开关5包括支板51、滑杆52和微动开关53,第一壳体11的内侧壁固定安装两个滑杆52,且两个滑杆52相互平行设置,支板51上设有滑孔,且每个滑杆52外围对应滑动连接至一个滑孔内,每个滑杆52外围设置一个弹簧54,弹簧54的两端分别固定连接至第一壳体
11内侧壁、滑杆52的一侧,滑杆52的另一侧设置微动开关53,微动开关53信号连接至控制器。
31.矿用巡检系统停靠站在实施时有多种实施方式,如图5所示,该停靠站的顶升组件13是电液缸,顶升组件13上端固定连接至顶盖14的下端,顶升组件的下端固定连接至底座15,同时可根据实际需要将喷气头31和喷淋头32装配至外壳的内侧壁,且外壳的内侧壁可以选用毡布、风琴罩等柔性材质,便于折叠,顶盖14选用硬质的钢性材料,而在顶盖14下端安装清刷组件,清刷组件可以是毛刷、毡布刷等,清刷组件通过电机实现旋转擦拭,电机的驱动器信号连接至plc,以备清洁使用,在停靠站的外壳还设置识别标签19,机器人通过识别标签启动内部预设的启停程序,而停靠站即设置在机器人的移动路径上,以便实现定点的避免或清洁。
32.矿用巡检系统停靠站的工作过程:
33.当机器人需要避险或清洗时发出避险信号,天线接收避险信号后控制器控制红外发射器4持续发射红外信号,同时控制器控制顶升组件13运转设备圈数,即顶升组件13带动顶盖14上升设定距离,在此时顶盖14依次带动第二壳体12、滑轨16沿滑槽轨迹运行,如图1-2所示,第一壳体11、底座15保持不动,第二壳体12与顶盖14同步上升,使得外壳1具备收放功能,以确保外壳1适用不同型号的机器人。
34.当机器人上的红外接收器接收红外信号并对正归为机器人与外壳1的相对位置,并缓慢驶入外壳1内部,当机器人碰触至止停开关5时,止停开关5信号输入控制器,控制器通过天线发送机器人止停指令,当机器人需要清洗时,控制器控制承重轨道2托起机器人,然后通过清洗组件3的喷气管对机器人进行吹扫或喷淋管机器人水洗。
35.当机器人避险完成或清理完成后,控制控制承重轨道2复原,机器人驶出停靠站,控制器控制顶升组件13使得第一壳体11和第二壳体12相对位置复原,同时控制器控制喷淋管的电磁阀打开对凹槽17进行清洗,污水经凹槽17导流至排污管内,以确保停靠站内减少污染物。
36.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。