1.本实用新型涉及到焊接技术设备领域,特别涉及到一种环形自动焊接装置。
背景技术:
2.在传统的机械加工中,针对不同的复杂零件进行加工以及装配时,通常都需要专门设计专用的工装夹具,当单排零件加工量比较小时,随着该批零件加工的结束,配套的工装也由于专用性过强而无法用于其他零件加工,因此,这种机械加工及装配模式的设计准备时间长、生产装配效率低并且制造成本高,极大的延长了企业的设计以及生产周期并且增加了企业的生产投入,对企业的生产竞争力有较大影响,而对圆柱形工件进行焊接加工时,比如对圆柱形工件的表面焊出尺寸相同,位置精确的焊道时,加工精度往往达不到要求且自动化比较低,效率不高。
技术实现要素:
3.本实用新型要解决的技术问题是:解决上述的存在的技术问题,提供一种对圆柱形工装的表面自动化精确加工,提升加工效率和加工精度的环形自动焊接装置。
4.本实用新型解决其技术问题所采用的的技术方案是:
5.一种环形自动焊接装置,包括控制电箱、控位装置和夹持装置,控制电箱设置在夹持装置的一侧并与控位装置和夹持装置电路连接;控位装置包括电焊枪、x轴位移单元、y轴位移单元和z轴位移单元,电焊枪设置在x轴位移单元上,x轴位移单元带动控位装置上的电焊枪沿水平横向移动;x轴位移单元与y轴位移单元通过连接件连接,y轴位移单元带动电焊枪沿着垂直方向运动;z轴位移单元带动控位装置整体水平竖直运动;电焊枪的枪口朝向夹持装置的夹持空间,夹持装置在夹持空间内夹持工装;夹持装置包括夹持平台、固定夹持部和伸缩夹持部,固定夹持部和伸缩夹持部设置在夹持平台上,伸缩夹持部与固定夹持部作相对运动,伸缩夹持部的夹持臂和固定夹持部上的夹持盘均可旋转。
6.以上方案中,x轴、y轴、z轴位移单元互相关联,电焊枪设置在x轴位移单元上,x轴位移单元设置在y轴位移单元上,y轴位移单元设置在z轴位移单元上,调整任一位移单元即调整电焊枪的位置,直至调整到最佳加工位;夹持装置设置为两部分,一部分固定,另外一部分可以水平移动,根据不同尺寸的工件进行调节以便夹持。伸缩夹持部相对于固定夹持部在调整时可以做相对运动,也可以做相反运动,伸缩夹持部的夹持臂和固定夹持部上的夹持盘可旋转,在夹持工件加工过程中,可以自动旋转以便实现对工件的旋转加工。
7.作为本实用新型的一种优选方案,夹持平台上设有滑槽,伸缩夹持部设置在滑槽上,伸缩夹持部上还设有刹车组件。设置刹车组件,再将伸缩夹持部通过滑槽调试至合适位置时固定伸缩夹持部不晃动。
8.作为本实用新型的一种优选方案,伸缩夹持部上设有控制夹持臂伸缩的旋转把手。旋转把手控制夹持臂与固定夹持部作相对或相反运动,用于更好地夹持不同长度的工件。
9.作为本实用新型的一种优选方案,y轴位移单元包括垂直设置的金属架、金属架上的第一滑轨和卡设在第一滑轨内垂直运动的第一连接件。
10.作为本实用新型的一种优选方案,x轴位移单元包括横向水平设置的金属架、金属架上的第二滑轨和卡设在第二滑轨的第二连接件,x轴位移单元和y轴位移单元通过第一连接件连接。
11.作为本实用新型的一种优选方案,第二连接件设有夹持电焊枪的夹枪工件。
12.作为本实用新型的一种优选方案,控位装置下还设有放置控位装置的电焊平台,所述z轴位移单元包括设置在电焊平台上的第三滑轨和控位装置底部的第三连接件,第三连接件卡设在第三滑轨的轨道槽内。
13.作为本实用新型的一种优选方案,控制电箱可控制电焊枪位移并对夹持装置夹持且旋转的工件进行加工。
14.作为本实用新型的一种优选方案,加工后的两组焊道的尺寸相同,位置对称。
15.本实用新型的有益效果是:
16.通过控制器控制三个位移单元配合旋转的夹持工装,使电焊枪对圆柱形工装的表面自动化精确加工,提升加工效率和加工精度;
17.夹持装置设置为两部分,一部分固定,另外一部分可以水平移动,根据不同尺寸的工件进行调节以便夹持,适用不同长度的工件。
附图说明
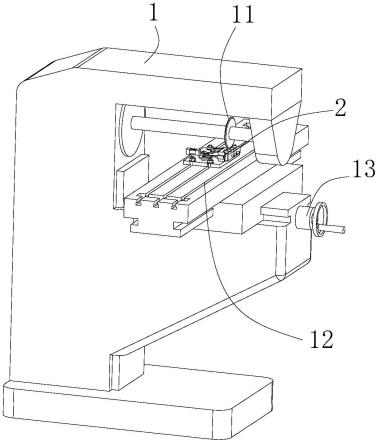
18.图1为实施例1中一种环形自动焊接装置的结构示意图;
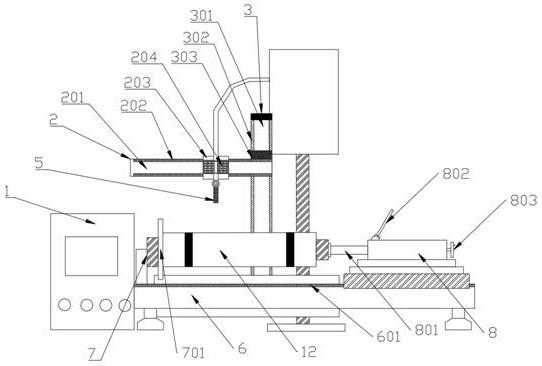
19.图2为实施例1中控位装置的侧视图;
20.上述附图标记:1、控制电箱;2、x轴位移单元;201、第二金属架;202、第二滑轨;203、第二连接件;204、夹枪工件;3、y轴位移单元;301、第一金属架;302、第一滑轨;303、第一连接件;4、z轴位移单元;5、电焊枪;6、夹持平台;601、滑槽;7、固定夹持部;701、夹持盘;8、伸缩夹持部;801、夹持臂;802、刹车杆;803、旋转把手;9、电焊平台;10、第三滑轨;11、第三连接件;12、工件。
具体实施方式
21.以下结合附图及实施例对本实用新型作进一步说明,但这些具体实施方案不以任何方式限制本实用新型的保护范围。
22.实施例1
23.如图1-2所示,一种环形自动焊接装置,其特征在于:包括控制电箱1、控位装置和夹持装置,控制电箱1设置在夹持装置的一侧并与控位装置和夹持装置电路连接;控位装置包括电焊枪5、x轴位移单元2、y轴位移单元3和z轴位移单元4,电焊枪5设置在x轴位移单元2上,x轴位移单元2带动控位装置上的电焊枪5沿水平横向移动;x轴位移单元2与y轴位移单元3通过连接件连接,y轴位移单元3带动电焊枪5沿着垂直方向运动;z轴位移单元4带动控位装置整体水平竖直运动;电焊枪5的枪口朝向夹持装置的夹持空间,夹持装置在夹持空间内夹持圆柱形工装12;夹持装置包括夹持平台6、固定夹持部7和伸缩夹持部8,固定夹持部7和伸缩夹持部8设置在夹持平台6上,伸缩夹持部8相对于固定夹持部7运动,伸缩夹持部8的
夹持臂801和固定夹持部7上的夹持盘701均可旋转。
24.在本实施例中,夹持平台6上设有滑槽601,伸缩夹持部8设置在滑槽601上,伸缩夹持部8上还设有刹车杆802,伸缩夹持部8上设有控制夹持臂801伸缩的旋转把手803,y轴位移单元3包括垂直设置的第一金属架301、第一金属架301上的第一滑轨302和卡设在第一滑轨302内垂直运动的第一连接件303,x轴位移单元2包括横向水平设置的第二金属架201、第二金属架201上的第二滑轨202和卡设在第二滑轨202的第二连接件203,x轴位移单元2和y轴位移单元3通过第一连接件303连接,第二连接件203设有夹持电焊枪5的夹枪工件204,控位装置下还设有放置控位装置的电焊平台9,所述z轴位移单元4包括设置在电焊平台9上的第三滑轨10和控位装置底部的第三连接件11,第三连接件11卡设在第三滑轨10的轨道槽内,控制电箱1可控制电焊枪5位移并对夹持装置夹持且旋转的工件12进行加工,加工后的两组焊道的尺寸相同,位置对称。
25.本实用新型一种环形自动焊接装置的加工原理及方法是:将圆柱形工件12放置在夹持装置的夹持空间内,转动旋转把手803,将工件12用夹持臂801和夹持盘701夹紧,在通过控制器控制x轴位移单元2、y轴位移单元3和z轴位移单元4固定好电焊枪5的位置,启动夹持臂801和夹持盘701进行旋转,电焊枪5对工件12表面进行加工。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。