1.本实用新型涉及作业机械技术领域,尤其涉及一种用于双臂架变幅的同步装置、双臂架系统及作业机械。
背景技术:
2.随着履带起重机的起重量不断增加,一些双臂架起重机应运而生,双臂架起重机具有大起重量、大起重力矩的优势,超大吨位起重机目前在市场上逐渐发挥大的作用。
3.双臂架起重机具有两个超起桅杆,需要较好地控制两个主臂臂架的变幅同步,如果两个主臂架不同步,将会造成超起变幅或吊载所述的双滑轮组的不平衡,从而给臂架带来侧载,造成安全隐患。
4.现有技术中,通常是通过摄像头或人眼观察同步绳与绳头的偏移距离,和同步绳游标尺所处位置,达到控制检测的目的,此种控制方式复杂,且偏差较大。
技术实现要素:
5.本实用新型提供一种用于双臂架变幅的同步装置、臂架系统及作业机械,用以解决现有技术中需要人为观察同步绳的偏差的缺陷,实现结构可靠,更简单实现同步控制。
6.本实用新型提供一种用于双臂架变幅的同步装置,设置于第一臂架和第二臂架上,第一超起变幅绳和第二超起变幅绳分别经所述第一臂架和所述第二臂架,包括:
7.同步绳,一端连接所述第一超起变幅绳,另一端连接所述第二超起变幅绳;
8.一对随行块,均随所述同步绳运动;
9.一对检测装置,分别设置于所述第一臂架上和所述第二臂架上;
10.一对重锤装置,每个所述重锤装置的一端与对应所述检测装置通过连接绳柔性连接,另一端穿设于所述同步绳上,且位于所述随行块和所述检测装置之间;所述重锤装置与所述随行块之间的距离为可允许的不同步长度。
11.根据本实用新型提供一种的用于双臂架变幅的同步装置,还包括:
12.第一超起卷扬,所述第一超起变幅绳的一端固定在所述第一超起卷扬上,所述第一超起卷扬用于控制所述第一超起变幅绳的移动
13.第二超起卷扬,所述第二超起变幅绳的一端固定在所述第二超起卷扬上,所述第二超起卷扬用于控制所述第二超起变幅绳的移动;
14.控制装置,控制装置分别与所述检测装置、所述第一超起卷扬和所述第二超起卷扬电连接,用于根据所述检测装置传递的信号控制所述第一超起卷扬和所述第二超起卷扬。
15.根据本实用新型提供的一种用于双臂架变幅的同步装置,还包括导向轮,所述导向轮设置于所述第一臂架和/或所述第二臂架上,所述同步绳的一端连接所述第一超起变幅绳,另一端绕过所述导向轮的外侧并与所述第二超起变幅绳连接。
16.根据本实用新型提供一种的用于双臂架变幅的同步装置,所述检测装置为拉绳开
关或拉力传感器。
17.根据本实用新型提供一种的用于双臂架变幅的同步装置,还包括:
18.一对连接耳板,一对所述连接耳板分别设置于所述第一臂架和所述第二臂架上,且所述检测装置分别对应设置于所述连接耳板上。
19.根据本实用新型提供一种的用于双臂架变幅的同步装置,所述连接绳为钢链或钢丝绳。
20.根据本实用新型提供一种的用于双臂架变幅的同步装置,所述连接绳与对应所述同步绳之间的夹角为锐角。
21.根据本实用新型提供一种的用于双臂架变幅的同步装置,所述连接绳与对应所述同步绳之间的夹角为30
°‑
60
°
22.本实用新型还提供一种双臂架系统,包括:第一臂架、第二臂架和上述所述的双臂架变幅的同步装置,第一臂架和第二臂架并行设置,且所述双臂架变幅的同步装置设置于所述第一臂架和所述第二臂架上。
23.本实用新型还提供一种作业机械,包括上述所述的双臂架系统。
24.本实用新型提供的用于双臂架变幅的同步装置,通过设置一对随块、一对重锤装置和一对检测装置,当同步绳一端的随行块与重锤装置接触时,检测装置给出信号并调节同步绳向另一端运动,以达到超起变幅同步控制效果,结构简单、控制简单,无需靠人为观察即可实现同步绳同步的检测与控制,更可靠。
25.进一步,在本实用新型提供的臂架系统中,由于具备如上所述的用于双臂架变幅的同步装置,因此同样具备如上所述的各种优势。
26.进一步,在本实用新型提供的作业机械中,由于具备如上所述的用于双臂架变幅的同步装置,因此同样具备如上所述的各种优势。
附图说明
27.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
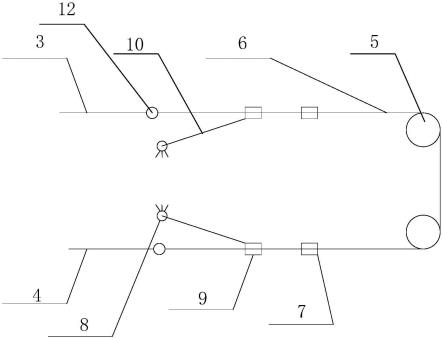
28.图1是本实用新型提供的用于双臂架变幅的同步装置原理示意图之一;
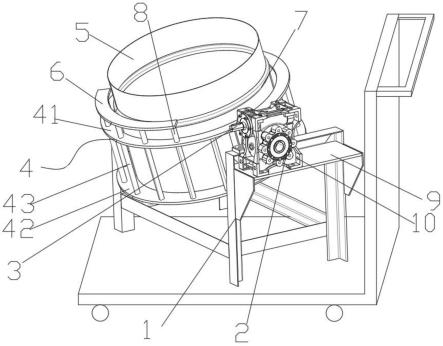
29.图2是本实用新型提供的臂架系统的整体结构示意图
30.图3是本实用新型提供的臂架系统的部分结构示意图;
31.图4是本实用新型提供的图3中部分结构放大示意图;
32.图5是本实用新型提供的控制装置的连接框图;
33.附图标记:
34.1:第一臂架;2:第二臂架;3:第一超起变幅绳;4:第二超起变幅绳;5:导向轮;6:同步绳;7:随行块;8:检测装置;9:重锤装置:10:连接绳;11:连接耳板;12:接头;
35.100:控制装置;110:信号收发模块;120:微处理器;130:卷扬控制模块。
具体实施方式
36.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.下面结合图1至图5描述本实用新型的用于双臂变幅的同步装置。
38.如图1-4所示,用于双臂变幅的同步装置设置于第一臂架1和第二臂架2上,第一超起变幅绳3和第二超起变幅绳4分别经第一臂架1和第二臂架2;用于双臂变幅的同步装置包括同步绳6、一对随行块7、一对检测装置8和一对重锤装置9,同步绳6的一端连接第一超起变幅绳3,另一端连接第二超起变幅绳4;同步绳6和第一超起变幅绳3、第二超起变幅绳4具有接头12;一对随行块7均设置于同步绳6上且分别对应第一臂架1和第二臂架2的区域,并均随同步绳6运动;一对检测装置8分别设置于第一臂架1上和第二臂架2上;一对重锤装置9,每个臂架上的重锤装置9的一端与对应检测装置8通过连接绳10柔性连接,另一端穿设于同步绳6上,且位于随行块7和检测装置8之间;并且重锤装置9的重力能够对连接绳10的拉力相抵消;重锤装置9与随行块7之间的距离为可允许的不同步长度。
39.当双臂架变幅在允许的长度距离内时,两侧的随行块7与对应的重锤装置9没有接触;此时,重锤装置9由于重力的作用通过连接绳10对检测装置8产生一定的拉力,也就是说,在常态正常工作状态,重锤装置9由于重力的作用,连接绳10为拉伸状态,对检测装置8呈拉紧状态。当双臂架变幅出现不同步的问题时,且由于不同步造成随行块7与重锤装置9之间的距离不断缩小,最后随行块7与重锤装置9抵接,则其中一侧的随行块7会与对应的重锤装置9接触,即推动重锤装置9,此时,推动的力则会抵消重锤装置9的一部分重力的分力,检测装置8检测到的拉力小于应有的拉力,则需要进行调节同步绳6向另一端运动,通过调整两个变幅桅杆的变幅速度,从而控制随行块7与重锤装置9之间的距离,以达到超起变幅同步控制需求,直至一对检测装置8检测到的均为正常值为止。
40.因此,通过一对随行块7、一对重锤装置9和一对检测装置8的设置,当其中一个随行块7与对应的重锤装置9接触时,会引起检测装置8检测数值的变化,之后调节同步绳6向另一端运动,从而达到超起变幅绳的同步效果。
41.在本实用新型的实施例中,还包括第一超起卷扬、第二超起卷扬和控制装置100,第一超起变幅绳3的一端固定在第一超起卷扬上,并且绳体缠绕在卷筒外侧。第一超起卷扬通过收放第一超起变幅绳3控制第一臂架1的变幅运动;第二超起变幅绳4的一端固定在第二超起卷扬上,第二超起卷扬通过收放第二超起变幅绳4控制第二臂架2的变幅运动;通过第一超起卷扬和第二超起卷扬的协同作用,以达到超起变幅同步。控制装置100分别与检测装置8、第一超起卷扬和第二超起卷扬电连接,控制装置100用于根据检测装置8传递的信号控制第一超起卷扬和第二超起卷扬,进一步控制第一超起变幅绳3和第二超起变幅绳4的运动,以达到超起变幅同步。
42.可以理解为,检测装置8检测到的数值超出预设范围或预设值后,检测装置8将检测到的数值传递给控制装置100,控制装置100根据数值发出电信号,控制第一超起卷扬和第二超起卷扬工作,进而控制第一超起变幅绳3和第二超起变幅绳4的运动,实现超起变幅
同步控制。
43.进一步地,检测装置8可以为拉力传感器,即在常态下,重锤装置9对连接绳10产生一定的拉力,拉力传感器默认该拉力为正常工作状态,一旦同步绳的随行块7与重锤装置9接触,随行块对重锤装置9产生一定的支撑力,该支撑力抵消一部分拉力,则拉力传感器检测到的拉力减小,之后,拉力传感器将拉力信号传递给控制装置100,控制装置100发出指令控制第一超起卷扬和第二超起卷扬运动,实现超起变幅同步控制。
44.具体控制时,当同步绳6的一端的随行块7与重锤装置9接触时,对应的拉力传感器给出信号到控制装置100,控制装置100发出电信号使同步绳6向另一端运动。即,第一超起卷扬和第二超起卷扬中的一者收卷,另一者放绳,或者一者快速收卷,另一者相对较慢收卷,即调整第一超起卷扬和第二超起卷扬的转动的速度,调整同步绳6处于合适的位置。
45.在本实用新型的另外一个实施例,检测装置8可以为拉绳开关,即,在重锤装置9的重力作用下,连接绳10呈拉伸状态,拉绳开关为常开状态;一旦随行块7对重锤装置9接触,随行块7对重锤装置9的支撑力抵消一部分重力,则拉绳开关由开启状态转为关闭状态;拉绳开关将关闭状态的信号传递给控制装置100,控制装置100发出电信号控制第一超起卷扬和第二超起卷扬运动,进一步实现第一超起变幅绳3和第二超起变幅绳4的运动,实现超起变幅同步控制。
46.当然,检测装置100还可以是其他电气控制元件,只要能实现检测的作用即可。
47.具体的,如图5所示,控制装置100包括信号收发模块110、微处理器120和卷扬控制模块130,其中,信号收发模块110和卷扬控制模块130通过电信号接入微处理器120;信号收发模块110与检测装置8电连接,信号收发模块110用于接收检测装置8传递过来的检测数值,并传递给微处理器120;微处理器120用于根据检测装置8传递过来的电信号进行处理并对卷扬控制模块130发出相应指令;卷扬控制模块130与第一超起卷扬和第二超起卷扬同时电连接,卷扬控制模块130根据微处理器120发出的指令控制第一超起卷扬和第二超起卷扬工作,进一步实现第一超起变幅绳3和第二超起变幅绳4的同步控制。
48.在本实用新型的实施例中,还包括一对连接耳板11,一对连接耳板11分别设置于第一臂架1和第二臂架2上,且检测装置8分别对应设置于连接耳板11上。连接耳板11的设置,为检测装置8的安装提供了便利,同时也确保了连接耳板11结构的稳定性。
49.其中,连接绳10可以为钢链或钢丝绳,既能保证连接可靠,又能实现当随行块与重锤装置接触时,能够将支撑力抵消部分重力,从而减小重锤装置对检测装置的拉力。
50.由于双臂架的工作状态大多为倾斜状态,即双臂架的轴线与水平面呈锐角,连接绳10与对应同步绳6之间的夹角设为锐角后,以使重锤装置9的重力可以对检测装置8实现拉伸作用。优选的,连接绳10与对应同步绳6之间的夹角为30
°‑
60
°
。
51.下面对本实用新型提供的臂架系统进行描述,下文描述的臂架系统与上文描述的双臂架变幅的同步装置可相互对应参照。
52.臂架系统包括第一臂架1、第二臂架2和上述的双臂架变幅的同步装置,第一臂架1和第二臂架2并行设置,且双臂架变幅的同步装置设置于第一臂架1和第二臂架2上。
53.进一步,在本实用新型实施例提供的双臂架系统中,由于具备如上所述的双臂架变幅的同步装置,因此同样具备如上所述的各种优势。
54.另外,本实用新型实施例的另一方面还提供了一种作业机械,包括上述的臂架系
统。
55.本实用新型实施例提供的作业机械钟,由于具备如上所述的双臂架变幅的同步装置,因此同样具备如上所述的各种优势。
56.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。