1.本实用新型涉及工业制造技术领域,特别涉及一种全自动换纱的机器人。
背景技术:
2.在高性能纤维收丝机行业中,高性能纤维纱锭重量重,而且对其表面要求不允许有毛丝以及掉边,且取纱锭和存放时都需要细致并且有规律,针对高性能纤维纱锭特性,工人在卸纱及存放时需要细致规则,但是人工进行操作时,重复一致性难以保持,个别损伤则会影响纤维的后段工序,从而降低产品质量。
3.而在采用机器人加工的防水进行操作时,又存在运动控制复杂、需要专业技术人员维护与保养、保养费用高又造价高等问题,大大增加了成本,损失了自动化带来的降低成本的效果。
4.因此,发明一种全自动换纱的机器人来解决上述问题很有必要。
技术实现要素:
5.本实用新型的目的在于提供一种全自动换纱的机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种全自动换纱的机器人,包括agv小车组件,所述agv小车组件顶部可转动的设置有机器人组件、第一旋转储料组件和第二旋转储料组件,所述第一旋转储料组件与第二旋转储料组件分别设置于机器人组件两侧,所述机器人组件中电动导轨带动机器人组件中安装架左移,使机器人组件中电动夹具对第一旋转储料组件或第二旋转储料组件中纱管进行夹取,所述agv小车组件中第一驱动电机通过机器人组件中第一旋转台带动机器人组件中电动夹具所夹取的第一旋转储料组件或第二旋转储料组件中纱管移动至卷纱工位进行卷纱,并在卷纱完毕后再次通过机器人组件中第一旋转台带动机器人组件中取卷臂对第一旋转储料组件或第二旋转储料组件中纱管进行转运,然后在机器人组件中电动导轨的带动下将悬挂到第一旋转储料组件或第二旋转储料组件中的储料架上;
7.所述agv小车组件包括小车车架与第一驱动电机,所述第一驱动电机设置有三个,三个所述第一驱动电机自左向右均匀固定设置于小车车架内部;
8.所述机器人组件包括第一旋转台、电动导轨、安装架、第二驱动电机、丝杆、升降滑块、摄像头、电动夹具和取卷臂;
9.所述第一旋转台位于小车车架顶部中心处,位于中间的所述第一驱动电机与第一旋转台传动连接,所述电动导轨固定设置于第一旋转台顶部,所述安装架可移动的设置于电动导轨顶部,所述第二驱动电机固定设置于安装架顶端,所述丝杆位于第二驱动电机内侧且与第二驱动电机传动连接,所述升降滑块套接设置于丝杆外侧且与丝杆螺纹连接,所述摄像头固定设置于升降滑块顶部,所述电动夹具固定设置于升降滑块一侧,所述取卷臂固定设置于升降滑块另一侧;
10.所述第一旋转储料组件与第二旋转储料组件均包括第二旋转台、旋转架、储料架和纱管;
11.第一旋转储料组件中所述第二旋转台与第二旋转储料组件中所述第二旋转台分别位于小车车架顶部两侧,且分别与位于两侧的所述第一驱动电机传动连接,所述旋转架固定设置于第二旋转台顶部,所述储料架与纱管均设置有多个,多个所述储料架均匀固定设置于旋转架两侧,多个所述纱管分别滑动套接设置于多个储料架外侧。
12.优选的,所述agv小车组件还包括可编程plc,三个所述第一驱动电机、电动导轨、第二驱动电机、摄像头和电动夹具均与可编程plc电连接。
13.本实用新型的技术效果和优点:
14.本实用新型通过设置有agv小车组件、机器人组件、第一旋转储料组件和第二旋转储料组件,以便于利用机器人组件对第一旋转储料组件以及第二旋转储料组件上的纱管进行抓取,并在纱管卷纱完毕后通过取卷臂将其复位,相较于人工操作以及现有技术中的同类型装置,本实用新型运动控制简单,无需专业技术人员维护与保养,具有能不断重复工作和劳动、不知疲劳、以及抓举重物的力量比人手力大的特点,还能够减省工人、提高效率、降低成本以及提高产品品质,同时安全性更好,并且可以提升工厂形象。
附图说明
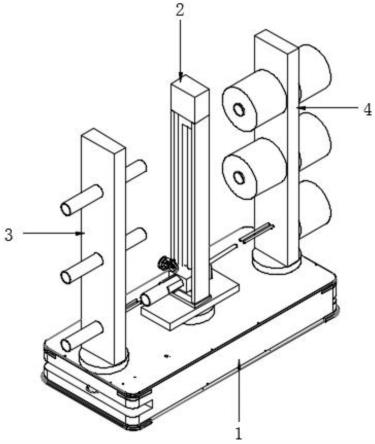
15.图1为本实用新型的整体立体结构示意图。
16.图2为本实用新型的整体细化结构示意图。
17.图3为本实用新型的整体正式结构示意图。
18.图中:1、agv小车组件;11、小车车架;12、第一驱动电机;2、机器人组件;21、第一旋转台;22、电动导轨;23、安装架;24、第二驱动电机;25、丝杆;26、升降滑块;27、摄像头;28、电动夹具;29、取卷臂; 3、第一旋转储料组件;4、第二旋转储料组件;41、第二旋转台;42、旋转架;43、储料架;44、纱管。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.本实用新型提供了如图1-3所示的一种全自动换纱的机器人,包括agv 小车组件1,所述agv小车组件1顶部可转动的设置有机器人组件2、第一旋转储料组件3和第二旋转储料组件4,所述第一旋转储料组件3与第二旋转储料组件4分别设置于机器人组件2两侧,所述机器人组件2中电动导轨22带动机器人组件2中安装架23左移,使机器人组件2中电动夹具28对第一旋转储料组件3或第二旋转储料组件4中纱管44进行夹取,所述agv小车组件1中第一驱动电机12通过机器人组件2中第一旋转台21带动机器人组件2中电动夹具28所夹取的第一旋转储料组件3或第二旋转储料组件4 中纱管44移动至卷纱工位进行卷纱,并在卷纱完毕后再次通过机器人组件 2中第一旋转台21带动机器人组件2中取卷臂29对第一旋转储料组件3或第二旋转储料组件4中纱管44进行转运,然后在机器人组件2中电动导轨 22的
带动下将悬挂到第一旋转储料组件3或第二旋转储料组件4中的储料架 43上。
21.如图3所示,所述agv小车组件1包括小车车架11与第一驱动电机 12,所述第一驱动电机12设置有三个,三个所述第一驱动电机12自左向右均匀固定设置于小车车架11内部。
22.如图2所示,所述机器人组件2包括第一旋转台21、电动导轨22、安装架23、第二驱动电机24、丝杆25、升降滑块26、摄像头27、电动夹具 28和取卷臂29。
23.更为具体的,所述第一旋转台21位于小车车架11顶部中心处,位于中间的所述第一驱动电机12与第一旋转台21传动连接,所述电动导轨22固定设置于第一旋转台21顶部,所述安装架23可移动的设置于电动导轨22 顶部,所述第二驱动电机24固定设置于安装架23顶端,所述丝杆25位于第二驱动电机24内侧且与第二驱动电机24传动连接,所述升降滑块26套接设置于丝杆25外侧且与丝杆25螺纹连接,所述摄像头27固定设置于升降滑块26顶部,所述电动夹具28固定设置于升降滑块26一侧,所述取卷臂29固定设置于升降滑块26另一侧。
24.同时,所述第一旋转储料组件3与第二旋转储料组件4均包括第二旋转台41、旋转架42、储料架43和纱管44。
25.更为具体的,第一旋转储料组件3中所述第二旋转台41与第二旋转储料组件4中所述第二旋转台41分别位于小车车架11顶部两侧,且分别与位于两侧的所述第一驱动电机12传动连接,所述旋转架42固定设置于第二旋转台41顶部,所述储料架43与纱管44均设置有多个,多个所述储料架43 均匀固定设置于旋转架42两侧,多个所述纱管44分别滑动套接设置于多个储料架43外侧。
26.还需要说明的是,所述agv小车组件1还包括可编程plc,三个所述第一驱动电机12、电动导轨22、第二驱动电机24、摄像头27和电动夹具28 均与可编程plc电连接。
27.本实用新型工作原理:
28.实际使用过程中,电动导轨22通过安装架23带动电动夹具28左移,进而使电动夹具28对第一旋转储料组件3中纱管44进行抓取,抓取完成后电动导轨22带动电动夹具28复位,然后第一驱动电机12带动第一旋转台 21进行旋转,旋转完成后电动导轨22再次带动安装架23移动,进而使电动夹具28抓取的纱管44进入卷纱工位进行卷纱,且卷纱开始前,电动导轨22 带动安装架23复位,进而使纱管44由电动夹具28内侧脱离;
29.卷纱完成后,第一驱动电机12带动第一旋转台21旋转,进而使取卷臂 29靠近该纱管44,随后电动导轨22带动安装架23移动,进而使取卷臂29 移动至该纱管44内侧,随后第一驱动电机12再次带动第一旋转台21旋转,进而使取卷臂29带动该纱管44移出,然后电动导轨22带动安装架23 移动,进而使取卷臂29带动该纱管44回到储料架43外侧;
30.重复上述操作多次,进而完成所有纱管44的卷纱操作。
31.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。