1.本实用新型一种用于启动电机拨杆第一轴段侧加工前的抓取上料机械手。
背景技术:
2.参见图1-2,其为一种启动电机拨杆,该启动电机拨杆(t)为多段台阶轴,该启动电机拨杆具有依次设置的第一轴段(t-1)、第二轴段(t-2)、第三轴段(t-3)、第四轴段(t-4)及第五轴段(t-4)。该第二轴段(t-2)外径大于所述第一轴段(t-1)外径和第三轴段(t-3)外径,该第三轴段(t-3)、第四轴段(t-4)及第五轴段(t-5)外径依次变小。而该启动电机拨杆在生产时是采用轴或杆件作为毛坯件,然后通过机床(如数控车床)机加工而得到。由于该启动电机拨杆(t)为轴类工件,在机床上一般采用三爪卡盘(如自动三爪卡盘)装夹后再车加工外圆和轴端面。而在加工工件不同轴侧向时,工件夹紧部位和轴向方向是不同,需要重新装夹。而在实际在生产时,为了提高加工效率,采用分工加工,一般设置配置两种机床,一种为上工序机床并用于启动电机拨杆的第一轴段侧加工(如加工其第一轴段和第二轴段的外圆及端面)。另一种为下工序机床用于启动电机拨杆的第五轴段侧加工(如加工其第三轴段、第四轴段及第五轴段的外圆及端面)。
3.而在上工序机床在对启动电机拨杆的第一轴段侧加工生产过程中,为了达到提高生产效率,做到连续无人生产,需要将启动电机拨杆排列输送并逐一供料给上料机械手,再通过上料机械手抓取后装到数控车床主轴上的自动三爪卡盘上,可实现无需人工抓紧和操作的全自动生产。相应地,为了满足上述使用要求并配合上料机械手定点逐一抓取工作。
4.另外,在实际工工作时发现上料机械手在抓取时很难精准控制电机拨杆上料到位时的中心和轴向位置,导致机床加工时自动三爪卡盘夹紧时启动电机拨杆轴向坐标难精准定位控制,由于在采用数控车床加工时,其刀具程序设定并自动进给加工,每次执行加工的刀具轨迹一致,而当该电机拨杆轴轴向位置发生变化时其轴向基准会存在偏差,导致加工后的工件实际尺寸存在偏差。
技术实现要素:
5.为了解决现有技术中存在的上述一个或多个缺陷问题,本实用新型提供了一种用于启动电机拨杆第一轴段侧加工前的抓取上料机械手。
6.为实现上述目的,本实用新型提供了一种用于启动电机拨杆第一轴段侧加工前的抓取上料机械手,其特征在于:包括水平驱动机构、竖向驱动机构及启动电机拨杆夹具;所述水平驱动机构通过竖向驱动机构与启动电机拨杆夹具连接;该水平驱动机构用于驱动启动电机拨杆夹具水平位移;该竖向驱动机构用于驱动启动电机拨杆夹具竖向位移;所述启动电机拨杆夹具包括夹具座、平行夹爪和定位套;该两个夹指平行相对设置,该两个夹指相对内侧对称设有两个夹槽,该两个夹槽用于电机拨杆的第二轴段夹持;该定位套位于所述两个夹槽之间且与夹具座相对固定,该定位套一端上设有用于启动电机拨杆的第一轴段插入后定位的定位孔。
7.采用上述方案,先将启动电机拨杆的第一轴段插入所述定位套的定位孔内配合而实现中心和轴向同时定位;然后启动该平行夹爪工作并驱动该两个夹指平行靠近运动,该两个夹槽会对称夹紧电机拨杆的第二轴段,然后再通过所述水平驱动机构和所述竖向驱动机构工作,可驱动启动电机拨杆夹具沿水平和竖向将抓取的工件搬运位移到加工机床上(如数控机床的自动三爪卡盘上)而实现自动上料。由于每个电机拨杆在上料时都是先被该定位套中心和轴向坐标精确定位后再被夹紧,当再通过水平位移和竖向位移定行程后送装到加工机床上的自动三爪卡盘上时,能保证每次加工机床上的自动三爪卡盘上所装夹的电机拨杆轴向坐标一致。
8.优选地,所述水平驱动机构包括第一支架、第一驱动缸和第一位移座;该第一位移座通过水平导向件与该第一支架可滑动配合,该第一驱动缸水平地设置在第一支架上,该第一驱动缸输出端与第一位移座连接。
9.优选地,所述竖向驱动机构包括第二支架、第二驱动缸和第二位移座;该第二位移座通过竖向导向件与该第二支架可滑动配合,该第二驱动缸竖向地设置在该第二支架上,该第二驱动缸输出端与第二位移座连接。
10.优选地,该定位套另一端通过外连接件与所述夹具座连接。
11.本实用新型有益效果:
12.第一,本实用新型由于每个电机拨杆在上料时都是先被该定位套中心和轴向坐标精确定位后再被夹紧,当再通过水平位移和竖向位移定行程后送装到加工机床上的自动三爪卡盘上再自动夹紧时,以实现精准装夹,能保证每次加工机床上的自动三爪卡盘上所装夹的电机拨杆轴向坐标一致;能保证加工后的工件尺寸和位置精度;同时替代人工操作,可降低劳动强度,提高生产效率,利于自动化连续生产;
13.第二,本实用新型启动电机拨杆第一轴段侧加工的抓取上料机械手可与输送供料装置配合使用,通过输送供料装置的排列输送并逐一供料,再与本抓取上料机械手配合而能实现定点位置并逐一抓取,可组合后实现自动无人上料给加工机床,能大大提高生产效率,可实现无需人工抓紧和操作,而实现全自动连续生产。
附图说明
14.图1-2是一种启动电机拨杆的结构示意图。
15.图3-6是本实用新型实施例中一种用于启动电机拨杆第一轴段侧加工前的抓取上料机械手的结构示意图。
16.图7-9是本实用新型实施例中一种用于启动电机拨杆第一轴段侧加工前的抓取上料机械手在夹紧启动电机拨杆时的工作状态图。
17.图10是图7的局部放大图。
18.图11是本实用新型设置在输送供料装置于机床之间并在抓取电机拨杆时的工作状态图。
19.图12是本实用新型设置在输送供料装置于机床之间并由图11状态再经水平位移(即向右位移)运动到位时的工作状态图。
20.图13是本实用新型设置在输送供料装置于机床之间并由图12状态再经下行运动(即向下位移)到位时的工作状态图。
21.图14是本实用新型设置在输送供料装置于机床之间并由图13状态再将电机拨杆水平位移(即向左位移)并使第五轴段插装到三爪卡盘内到位时的工作状态图。
22.图15是图12中b处放大图。
具体实施方式
23.下面结合附图和实施例对本实用新型作进一步说明:
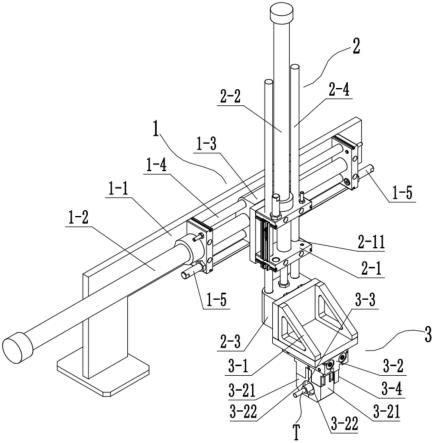
24.实施例一:可参见图3-10,一种用于启动电机拨杆第一轴段侧加工前的抓取上料机械手,其包括水平驱动机构1、竖向驱动机构2及启动电机拨杆夹具3。
25.所述启动电机拨杆夹具3用于启动电机拨杆t的夹紧或松开。
26.在本实施例中,所述启动电机拨杆夹具3包括夹具座3-1、平行夹爪3-2和定位套3-3;该两个夹指3-21平行相对设置,该两个夹指3-21相对内侧对称设有两个夹槽3-22,该两个夹槽3-22用于电机拨杆t的第二轴段t-2夹持;该定位套3-3位于所述两个夹槽3-22之间且与夹具座3-1相对固定,该定位套3-3一端上设有用于与启动电机拨杆t的第一轴段t-1定位配合的定位孔3-31。
27.具体地,该平行夹爪3-2可采用smc(中国)有限公司所(或其他公司如无锡福力德液压机械有限公司)生产或销售的mhzl2-10d型号产品。
28.具体地,该定位套3-3的定位孔3-31内径与启动电机拨杆t的第一轴段t-1外径相匹配,当该启动电机拨杆t的第一轴段t-1插入所述定位套3-3的定位孔3-31内时同心配合而中心定位。而该启动电机拨杆t的第一轴段t-1与第二轴段t-2相接处的第一台阶面t-22与定位套3-3(即定位孔3-31孔口处外端面)一端面相抵接触配合,该启动电机拨杆t被轴向定位。
29.在本实施例中,该定位套3-3另一端通过外连接件3-4与所述夹具座3-1连接。具体地,该外连接件3-4下端与该定位套3-3后端固定连接,该外连接件3-4上端与夹具座3-1固定连接。这样该定位套3-3与夹具座3-1固定为一体;而使该定位套3-3与夹具座3-1实现相对固定。
30.其中,所述水平驱动机构1通过竖向驱动机构2与启动电机拨杆夹具3连接;该水平驱动机构1用于驱动启动电机拨杆夹具3水平位移。
31.其中,该竖向驱动机构2用于驱动启动电机拨杆夹具3竖向位移。
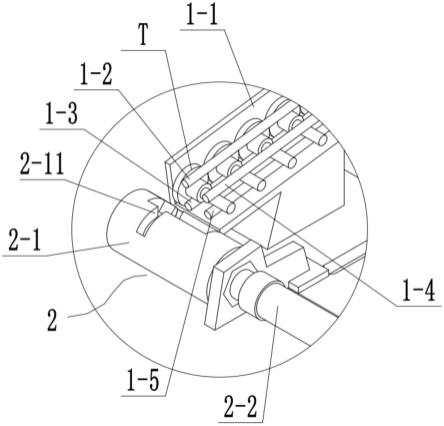
32.优选地,所述水平驱动机构1包括第一支架1-1、第一驱动缸1-2和第一位移座1-3;该第一位移座1-3通过水平导向件1-4与该第一支架1-1可滑动配合,该第一驱动缸1-2水平地固定安装在第一支架1-1上,该第一驱动缸1-2输出端与第一位移座1-3连接。
33.具体地,该水平导向件1-4固定在第一支架1-1上,该第一位移座1-3上设有用于与水平导向件1-4滑动配合的第一导向孔,该第一位移座1-3沿水平导向件1-4可导向地水平滑动。
34.在本实施例中,该水平导向件1-4为水平导向杆。
35.该第一驱动缸1-2可采用伸缩气缸。该第一驱动缸1-2伸缩运动时,该第一驱动缸1-2会驱动该第一位移座1-3沿水平导向件1-4可导向地水平往复位移。
36.另外,该第一支架1-1上设置有用于控制该第一位移座1-3往复终点位置分别精准限位的两个第一缓冲器1-5。
37.优选地,所述竖向驱动机构2包括第二支架2-1、第二驱动缸2-2和第二位移座2-3;该第二位移座2-3通过竖向导向件2-4与该第二支架2-1可滑动配合,该第二驱动缸2-2竖向地固定安装在该第二支架2-1上,该第二驱动缸2-2输出端朝下并与第二位移座2-3连接。
38.具体地,该第二支架2-1固定在该第一位移座1-3上,该第二位移座2-3位于第二支架2-1下方,该竖向导向件2-4下端与该第二位移座2-3固定连接,该第二支架2-1上设有用于与竖向导向件2-4滑动配合的第二导向孔2-11,该第二位移座2-3与第二支架2-1可沿竖向相对滑动。
39.在本实施例中,该竖向导向件2-4为竖向导向杆。
40.该第二驱动缸2-2可采用伸缩气缸。该第二驱动缸2-2伸缩运动时,该第二驱动缸2-2会驱动该第二位移座2-3在竖向导向件2-4导向下相对第二支架2-1做竖向升降位移。
41.本实用新型在使用时,先将启动电机拨杆t的第一轴段t-1插入(或采用推送装置逐一推入)到所述定位套3-3的定位孔3-31内配合而实现中心和轴向同时定位;然后启动该平行夹爪3-2工作并驱动该两个夹指3-21平行靠近运动,其两个夹槽3-22会对称夹紧电机拨杆t的第二轴段t-2,然后再通过所述水平驱动机构1和所述竖向驱动机构2工作,可驱动启动电机拨杆夹具3沿水平和竖向将抓取的工件搬运位移到加工机床设备上(如数控机床的自动三爪卡盘上)而实现自动上料。
42.由于本用于启动电机拨杆第一轴段侧加工的抓取上料机械手可实现在夹紧前先将电机拨杆中心和轴向定位,因此可保证夹紧时的中心和轴向位置,同时也保证经水平驱动机构1和所述竖向驱动机构2驱动位移后,能精准地送给加工设备(如数控机床的自动三爪卡盘)的自动夹具上,以实现精准装夹,并保证加工后的尺寸和位置精度。
43.具体地,本用于启动电机拨杆第一轴段侧加工的抓取上料机械手设置在数控车床上,并用于将电机拨杆t定点抓取后转运后再插装到数控车床主轴上的自动三爪卡盘4上。
44.在本实施例中,所述数控车床采用卧式数控车床。
45.该数控车床与自动三爪卡盘可采用现有结构设计。
46.另外,本用于启动电机拨杆第一轴段侧加工的抓取上料机械手与输送供料装置配合工作。
47.具体地,本用于启动电机拨杆第一轴段侧加工的抓取上料机械手设置在输送供料装置与机床的自动三爪卡盘之间。
48.该输送供料装置具有依次设置的输送轨道5和推送机构6;该输送轨道5上可预先直线排列地放置若干启动电机拨杆,该输送轨道倾斜设置(输送轨道与水平方向的倾斜角5-25
°
)并使其上的电机拨杆t在自身重力作用下可向下输送。
49.具体地,该输送轨道5可采用导向槽,该导向槽横切面外形与启动电机拨杆外形相匹配。
50.该推送机构6设置在所述输送轨道下端处;该推送机构6包括推送筒6-1和推送缸6-2,该推送筒6-1侧壁上设有进入口6-11(可参见15),所述输送轨道下端处落下的启动电机拨杆可经进入口6-11进入所述推送筒6-1内,该推送缸输出端位于所述推送筒内且可将所述推送筒内的启动电机拨杆向外推出而可插入所述启动电机拨杆夹具3的定位套3-3定位孔3-31内定位(可参见图11状态)。
51.而在生产时,先将启动电机拨杆夹具位移到对准推送筒6-11出口处,再启动所述
推送机构6的推送缸6-2工作,将推送筒3-1内的电机拨杆t推出推送筒6-1并向外伸出或者直接推到电机拨杆夹具3的定位套3-3的定位孔3-31内抵紧而定位;再启动电机拨杆夹具3的平行夹爪3-2工作并将电机拨杆t的第二轴段t-2夹紧;再启动水平驱动机构1并驱动电机拨杆夹具3远离所述推送机构6水平位移到位(即向右位移,参见图12);再启竖向驱动机构2工作并电机拨杆夹具3下行位移到位(即向下位移,参见图13),再启动水平驱动机构1工作并驱动电机拨杆夹具3朝向所述数控车床主轴上的自动三爪卡盘4水平位移到位(即向左位移),此时该电机拨杆夹具3上的电机拨杆的第五轴段t-5会插入数控机床的所述自动三爪卡盘4内并到位;再启动自动三爪卡盘4自动夹紧电机拨杆t的第五轴段t-5(可参见图14),然后启动电机拨杆夹具3的平行夹爪3-2工作并将电机拨杆t的第二轴段t-2松开,然后再驱动通过水平驱动机构1和竖向驱动机构2驱动该电机拨杆夹具3复位运动,再去抓取下一个工件。而与此同时,该数控车床控制刀具自动进给并自动车加工其三爪卡盘4上所夹紧的电机拨杆的第一轴段t-1外圆、第一端面t-11、第二轴段t-2及第一台阶面t-22(即第一轴段侧加工)。
52.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。