1.本实用新型一种用于启动电机拨杆第一轴段侧加工前的输送供料装置。
背景技术:
2.参见图1-2,其为一种启动电机拨杆,该启动电机拨杆(t)为多段台阶轴,该启动电机拨杆具有依次设置的第一轴段(t-1)、第二轴段(t-2)、第三轴段(t-3)、第四轴段(t-4)及第五轴段(t-4)。该第二轴段(t-2)外径大于所述第一轴段(t-1)外径和第三轴段(t-3)外径,该第三轴段(t-3)、第四轴段(t-4)及第五轴段(t-5)外径依次变小。而该启动电机拨杆在生产时是采用轴或杆件作为毛坯件,然后通过机床(如数控车床)机加工而得到。
3.由于该启动电机拨杆(t)为轴类工件,在机床上一般采用三爪卡盘(如自动三爪卡盘)装夹后再车加工外圆和轴端面。而在加工工件不同轴侧向时,工件夹紧部位和轴向方向是不同,需要重新装夹。而在实际在生产时,为了提高加工效率,采用分工加工,一般设置配置两种机床,一种为上工序机床并用于启动电机拨杆的第一轴段侧加工(如加工其第一轴段和第二轴段的外圆及端面)。另一种为下工序机床用于启动电机拨杆的第五轴段侧加工(如加工其第三轴段、第四轴段及第五轴段的外圆及端面)。
4.而在上工序机床在对启动电机拨杆的第一轴段侧加工生产过程中,为了达到提高生产效率,做到连续无人生产,需要将启动电机拨杆排列输送并逐一供料给上料机械手,再通过上料机械手抓取后装到数控车床主轴上的自动三爪卡盘上,可实现无需人工抓紧和操作的全自动生产。相应地,为了满足上述使用要求并配合上料机械手定点逐一抓取工作,因此需要设计研发一种用于启动电机拨杆第一轴段侧加工前的输送供料装置,用以替代人工操作。
技术实现要素:
5.为了解决现有技术中存在的上述一个或多个缺陷问题,本实用新型提供了一种用于启动电机拨杆第一轴段侧加工前的输送供料装置。
6.为实现上述目的,本实用新型提供了一种用于启动电机拨杆第一轴段侧加工前的输送供料装置,其特征在于:包括输送轨道和推送机构;该输送轨道倾斜设置并使其上放置的电机拨杆在自身重力作用下可向下输送;该推送机构设置在所述输送轨道下端处;该推送机构包括推送筒和推送缸,该推送筒侧壁上设有进入口,所述输送轨道下端处落下的启动电机拨杆可经进入口进入所述推送筒内,该推送缸输出端位于所述推送筒内且可将所述推送筒内的启动电机拨杆向外推出。
7.采用上述方案,该若干启动电机拨杆直线排列放置的输送轨道上,而该输送轨道上放置的启动电机拨杆在自身重力作用下可向下输送,而所述输送轨道下端处落下的启动电机拨杆经进入口进入所述推送筒内,再启动该推送缸工作,可将述推送筒内的启动电机拨杆向外推出,然后供上料机械手对所述推送筒外口推出的电机拨杆定点逐一抓取,然后再经上料机械手转装到数控车床主轴上的自动三爪卡盘上,以实现无人自动上料。而推送
缸回缩复位后,该推送筒内腾空,而所述输送轨道下端处下一个启动电机拨杆会继续经进入口进入所述推送筒内补上;再配合推送机构可实现将输送轨道上的逐一地分送给上料机械手。
8.优选地,该输送轨道包括角梁、第一上限位杆、第一下限位杆、第二上限位杆和第二下限位杆;且所述角梁、第一上限位杆、第一下限位杆、第二上限位杆和第二下限位杆相互平行并相对固定;其中,该角梁的侧边内面用于启动电机拨杆的第一端面限位;该角梁的底边内面用于启动电机拨杆的第二轴段外圆支承;其中,该第一上限位杆与第一下限位杆上下设置且分别用于该启动电机拨杆的第三轴段外圆上下限位;且该第一上限位杆与第一下限位杆还用于电机拨杆的第二轴段第二台阶面限位;其中,该第二上限位杆和第二下限位杆上下设置且分别用于该启动电机拨杆的第五轴段外圆上下限位。
9.采用上述方案,当该电机拨杆在向下输送运动时,该电机拨杆被角梁、第一上限位杆、第一下限位杆、第二上限位杆和第二下限位杆所同时导向限位,可使电机拨杆在输送运动时形态稳定,并保证其能顺利正对地经进入口进入所述推送筒内,保证输送的平顺性、可精确性,保证长期稳定工作,避免生产中断。另外,该电机拨杆在运动时与第一上限位杆、第一下限位杆、第二上限位杆和第二下限位杆均为点接触,摩擦系数低,阻力小,因此可保证其能在自身重力作用下向上顺利地输送。
10.优选地,所述第一上限位杆和第一下限位杆通过上连接架与角梁固定为一体;所述第二上限位杆和第二下限位杆通过下连接架与角梁固定为一体。
11.作为第二种优选地,所述输送轨道为导向槽,该导向槽的横截面外形与启动电机拨杆外形相匹配。
12.优选地,所述输送轨道与水平方向之间的夹角为5-25
°
。
13.本实用新型有益效果:
14.本实用新型可用于启动电机拨杆在机加工时实现排列输送并逐一供料;用于确保上料机械手配合能实现定点位置并逐一抓取,可组合后实现自动无人上料给加工机床,利于提高生产效率,可实现无需人工抓紧和操作,以实现全自动连续生产。
附图说明
15.图1-2是一种启动电机拨杆的结构示意图。
16.图3-5是本实用新型实施例一中一种用于启动电机拨杆第一轴段侧加工前的输送供料装置的结构示意图。
17.图6是图4中a处放大图。
18.图7是图5中b处放大图。
19.图8是本实用新型实施例一中排列输送机构的截面图。
20.图9-10是推送机构的结构示意图。
21.图11是本实用新型设置在上工序机床上且当上料机械手在抓取推送机构上推出的电机拨杆时的工作状态图。
22.图12是本实用新型设置在上工序机床上且当上料机械手由图12状态再经横向位移(即向右位移)运动到位时的工作状态图。
23.图13是本实用新型设置在上工序机床上且当上料机械手由图13状态再经下行运
动(即向下位移)到位时的工作状态图。
24.图14是本实用新型设置在上工序机床上且当上料机械手由图13状态再将电机拨杆横向位移(即向左位移)插装到三爪卡盘4上时的工作状态图。
25.图15是本实用新型实施例二中排列输送机构的截面图。
具体实施方式
26.下面结合附图和实施例对本实用新型作进一步说明:
27.实施例一:可参见图3-10,一种用于启动电机拨杆第一轴段侧加工前的输送供料装置,其包括输送轨道1和推送机构2。
28.可参见图4-5,该输送轨道1倾斜设置并使其上的电机拨杆t在自身重力作用下可向下输送,在该输送轨道1上可将若干启动电机拨杆t预先直线排列地放置(可参见图4和5)。
29.可参见图3,优选地,所述输送轨道1与水平方向之间的夹角k为5-25
°
。
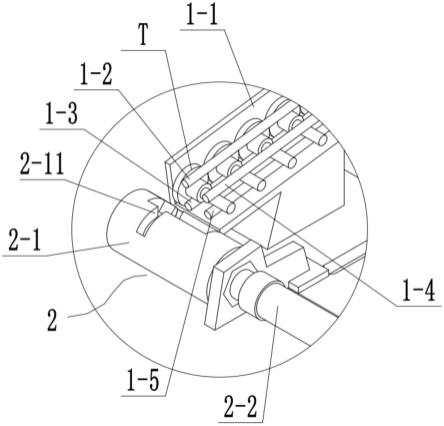
30.可参见图6-8,在本实施例中,该输送轨道1包括角梁1-1、第一上限位杆1-2、第一下限位杆1-3、第二上限位杆1-4和第二下限位杆1-5;且所述角梁1-1、第一上限位杆1-2、第一下限位杆1-3、第二上限位杆1-4和第二下限位杆1-5相互平行并相对固定。
31.其中,该角梁1-1的侧边内面1-11用于启动电机拨杆t的第一端面t-11限位;该角梁1-1的底边内面1-12用于启动电机拨杆t的第二轴段t-2外圆支承。
32.其中,该第一上限位杆1-2与第一下限位杆1-3上下设置且分别用于该启动电机拨杆t的第三轴段t-3外圆上下限位;且该第一上限位杆1-2与第一下限位杆1-3还用于电机拨杆t的第二轴段t-2第二台阶面t-21限位。
33.该启动电机拨杆t的第三轴段t-3被限制在第一上限位杆1-2与第一下限位杆1-3之间的间隙内导向运动,而在运动时该第一下限位杆1-3会对启动电机拨杆t的第三轴段t-3外圆支承。
34.其中,该第二上限位杆1-4和第二下限位杆1-5上下设置且分别用于该启动电机拨杆t的第五轴段t-5外圆上下限位。该启动电机拨杆t的第五轴段t-5被限制在该第二上限位杆1-4和第二下限位杆1-5间的间隙内导向运动,在运动时,该第二下限位杆1-5会对启动电机拨杆t的第五轴段t-5外圆支承。
35.可参见图7-9,优选地,所述第一上限位杆1-2和第一下限位杆1-3通过上连接架1-6与角梁1-1固定为一体;所述第二上限位杆1-4和第二下限位杆1-5通过下连接架1-7与角梁1-1固定为一体。
36.具体地,该角梁1-1为角钢材质。
37.具体地,该上连接架1-6与角梁1-1的侧边上端焊接固定,该上连接架1-6具有朝下延伸的两个下连接端并分别与第一上限位杆1-2和第二上限位杆1-4焊接固定。
38.可参见图7-9,具体地,该下连接架1-7与角梁1-1的底边焊接固定,该下连接架1-7具有朝上延伸的两个上连接端并分别与第一下限位杆1-3和第二下限位杆1-5焊接固定。
39.可参见图6-8,该输送轨道1上的电机拨杆t在向下输送运动时,该电机拨杆t被角梁1-1、第一上限位杆1-2、第一下限位杆1-3、第二上限位杆1-4和第二下限位杆1-5所同时导向限位并电机拨杆t导向运动,可使电机拨杆t在输送运动时形态稳定,并保证其能顺利
正对地经进入口2-11进入所述推送筒2-1内,保证输送的平顺性、可精确性,保证长期稳定工作,避免生产中断。另外,该电机拨杆t在运动时与第一上限位杆1-2、第一下限位杆1-3、第二上限位杆1-4和第二下限位杆1-5均为点接触,摩擦系数低,阻力小,因此可保证其能在自身重力作用下向上顺利地自动输送。
40.可参见图9-10,该推送机构2设置在所述输送轨道1下端处;该推送机构2包括推送筒2-1和推送缸2-2,该推送筒2-1侧壁上设有进入口2-11,所述输送轨道1下端处落下的启动电机拨杆t可经进入口2-11进入所述推送筒2-1内,该推送缸2-2输出端位于所述推送筒2-1内且可将所述推送筒2-1内的启动电机拨杆t向外推出。
41.可参见图11-14,本实用新型在使用时,将若干启动电机拨杆直线排列放置的输送轨道1上;而该输送轨道1上的启动电机拨杆在自身重力作用下可向下输送,而所述输送轨道1下端处落下的启动电机拨杆t经进入口2-11进入所述推送筒2-1内,再启动推送缸2-2工作,可将述推送筒2-1内的启动电机拨杆t向外推出,然后供上料机械手对所述推送筒2-1外口推出的电机拨杆t定点逐一抓取,然后再经上料机械手3转装到数控车床主轴上的自动三爪卡盘4上。而当推送缸2-2回缩复位后,该推送筒2-1内腾空,而所述输送轨道1下端处下一个启动电机拨杆t会继续经进入口2-11进入所述推送筒2-1内补上,可实现自动补料。而通过推送机构2可实现将输送轨道1上的逐一分送给上料机械手3。
42.具体地,该上料机械手3用于所述推送筒2-1内推出的启动电机拨杆t抓取后插装到数控车床主轴上的自动三爪卡盘4上。
43.在本实施例中,所述数控车床采用卧式数控车床。
44.该数控车床与自动三爪卡盘可采用现有结构设计。
45.而该上料机械手3包括横向位移机构、竖向位移驱动机构及电机拨杆夹爪(如气动夹爪),该电机拨杆夹爪用于自动夹紧或松开电机拨杆t,而该横向位移机构用于驱动电机拨杆夹爪横向往复位移,而竖向位移驱动机构用于驱动电机拨杆夹爪竖向上下位移。
46.在生产上料时,先将电机拨杆夹爪位移到对准推送筒2-1出口处,再启动所述推送机构2的推送缸2-2工作,将推送筒2-1内的电机拨杆推出推送筒2-1并向外伸出或者直接推到电机拨杆夹爪上,再启动电机拨杆夹爪夹紧电机拨杆的第一轴段t-1(可参见图11),再启动横向位移机构工作并驱动电机拨杆夹爪远离所述推送机构2横向位移到位(即向右位移,可参见图12);再启竖向位移驱动机构工作并驱动电机拨杆夹爪下行位移到位(即向下位移,可参见图13);再启动横向位移机构工作并驱动电机拨杆夹爪朝向所述数控车床主轴上的自动三爪卡盘4横向位移到位(即向左位移,可参见图14);该电机拨杆夹爪上的电机拨杆的第四轴段t-4完全插入所述自动三爪卡盘4内并到位,再启动自动三爪卡盘4自动夹紧电机拨杆的第四轴段t-4。
47.然后可再上料机械手3工作,通过横向位移机构和竖向位移驱动机构驱动该电机拨杆夹爪反向运动而复位,再去抓取下一个工件。而与此同时,该数控车床通过控制刀具自动进给并实现自动地车加工自动三爪卡盘4上夹紧的电机拨杆上的第一轴段t-1外圆、第一端面t-11、第二轴段t-2外圆及第二轴段t-2第一台阶面t-22。
48.实施例二:可参见图15,本实施例与实施例一基本相同,其不同在于:所述输送轨道1具有导向槽100,该导向槽100的横截面与启动电机拨杆t外形相匹配。
49.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人
员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
