1.本发明涉及钣金技术领域,尤其涉及一种用于钣金涂装线上下件的自动上钩的抓手。
背景技术:
2.钣金是针对金属薄板(通常在6 mm以下)一种综合冷加工工艺,包括剪、冲/切/复合、折、铆接、拼接、成型(如汽车车身)等。其显著的特征就是同一零件厚度一致,钣金具有重量轻、强度高、导电(能够用于电磁屏蔽)、成本低、大规模量产性能好等特点。但是,现有的夹持设备不能很好的对材料进行夹紧,而且对工件拿取不便,耗时耗力。
3.因此,本领域的技术人员致力于开发一种用于钣金涂装线上下件的自动上钩的抓手,以解决上述背景技术中存在的问题。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何提供用于钣金涂装线上下件的自动上钩的抓手,减少人工人本,实现自动化上钩。
5.为实现上述目的,本发明提供了一种用于钣金涂装线上下件的自动上钩的抓手,包括抓手主体、快换法兰、第一夹爪和第二夹爪,所述快换法兰固定连接至所述抓手主体,所述抓手主体包括横向支架和纵向支架,所述横向支架和纵向支架成l形设置,所述第一夹爪沿平行于所述横向支架的长度方向可移动设置,并被配置为沿所述抓手主体可竖向移动、水平旋转运动、夹取用于钩住钣金件的挂钩以及利用吸盘吸住钩住的钣金件,所述第二夹爪沿所述纵向支架的长度延长方向可移动设置,并被配置为沿所述抓手主体作水平旋转运动、夹取用于钩住钣金件的挂钩以及利用吸盘吸住钩住的钣金件。
6.进一步地,所述横向支架的一端设置有第一伺服电机,所述横向支架的另一端和所述纵向支架的一端固定连接,所述纵向支架的另一端设置有第二伺服电机,所述横向支架沿其长度方向设置有第一丝杆和第一直线导轨,所述第一伺服电机通过第一联轴器连接所述第一丝杆,所述第一直线导轨的上方可滑动设置第一工作台,所述第一工作台的底部通过第一螺母座可移动设置在所述第一丝杆上,所述纵向支架沿其长度方向设置有第二丝杆和第二直线导轨,所述第二伺服电机通过第二联轴器连接所述第二丝杆,所述第二直线导轨的上方可滑动设置第二工作台,所述第二工作台的底部通过第二螺母座可移动设置在所述第二丝杆上。
7.进一步地,所述横向支架的内侧设置有第一拖链,所述第一拖链的一端连接至所述横向支架上靠近所述第一直线导轨的内侧的中间,所述第一拖链的另一端连接至所述第一工作台一端的内侧。
8.进一步地,还包括第一安装板,所述第一安装板的一端竖直安装在所述第一工作台上,并向所述横向支架的外侧延伸,所述第一安装板的另一端设置有安装架,所述安装架外侧竖直设置有滑轨,所述滑轨上可滑动设置有移动安装板,所述安装架上设置有第三伺
服电机,所述第三伺服电机被配置为驱动所述移动安装板沿所述滑轨竖向移动,所述第一夹爪固定在所述移动安装板上。
9.进一步地,所述纵向支架的内侧设置有第二拖链,所述第二拖链的一端连接至所述纵向支架上靠近所述第二直线导轨的内侧的中间,所述第二拖链的另一端连接至所述第二工作台一端的内侧。
10.进一步地,还包括第二安装板,所述第二安装板包括水平部和竖直部,所述水平部的一端水平安装在所述第二工作台上,并向所述纵向支架的长度延伸方向延伸,所述竖直部竖直安装在所述水平部的另一端上,所述第二夹爪固定在所述第二安装板的所述竖直部上。
11.进一步地,所述第一夹爪和第二夹爪中的每一个包括安装座、旋转气缸、转移板,所述转移板包括弯折部和安装部,所述弯折部设置在所述旋转气缸的下方,所述安装部和所述弯折部垂直设置,所述旋转气缸侧装在所述安装座上,所述旋转气缸通过回转台固定在所述弯折部上。
12.进一步地,所述第一夹爪和第二夹爪中的每一个还包括第一气缸、压紧杆、吸盘安装板、吸盘,所述第一气缸固定设置在所述弯折部上,所述压紧杆的一端可枢转连接至所述安装部上的第一轴,所述第一气缸的伸出端通过第一连杆推动所述压紧杆围绕所述第一轴旋转,所述压紧杆的另一端套设弹簧将所述吸盘安装板与所述压紧杆垂直相交抵靠在一起,所述吸盘固定安装在所述吸盘安装板上,所述吸盘的开口在所述压紧杆的长度方向上和所述弹簧相对设置。
13.进一步地,所述第一夹爪和第二夹爪中的每一个还包括底板、第二气缸、夹手气缸,所述底板固定在所述安装部的底部,所述第二气缸的固定端固定在所述底板上,所述第二气缸的伸出端连接至第二连杆的一端,第二连杆的另一端通过连接支架连接至所述底板上的第二轴,所述夹手气缸固定在所述连接支架上,所述夹手气缸的一对夹手的每一个上分别安装有夹取用于钩住钣金件的挂钩的夹钩板。
14.进一步地,所述安装座可拆卸安装在所述移动安装板或所述第二安装板上。
15.本发明的有益效果:本发明提供的一种用于钣金涂装线上下件的自动上钩的抓手,使用挂钩将钣金件钩取,避免了夹持设备不能很好的对钣金进行夹紧,实现了自动化上钩。在抓手钩取钣金件的时候,抓手在模组移动到固定位置时可能会出现抖动导致定位偏差,可以通过加入弹簧和吸盘来提高抓手在导轨上运行的稳定性。
16.以下将对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
17.图1是本发明的一个较佳实施例的用于钣金涂装线上下件的自动上钩的抓手的结构示意图;图2是本发明的一个较佳实施例的第一夹爪的结构示意图;图3是本发明的一个较佳实施例的另一个角度观察到的第一夹爪的结构示意图;图4是本发明的一个较佳实施例的处于工作状态时的第一夹爪的结构示意图。
18.其中,1-快换法兰,2-第一夹爪,3-第二夹爪,4-横向支架,5-纵向支架,6-第一伺服电机,7-第二伺服电机,8-第一直线导轨,9-第一工作台,10-第二工作台,11-水平部,12-第一拖链,13-第一安装板,14-安装架,15-滑轨,16-移动安装板,17-第三伺服电机,18-第二拖链,19-竖直部,20-安装座,21-旋转气缸,22-弯折部,23-第一气缸,24-压紧杆,25-吸盘安装板,26-吸盘,27-安装部,28-第一轴,29-第一连杆,30-弹簧,31-底板,32-第二气缸,33-夹手气缸,34-第二连杆,35-连接支架,36-第二轴,37-夹钩板,38-挂钩。
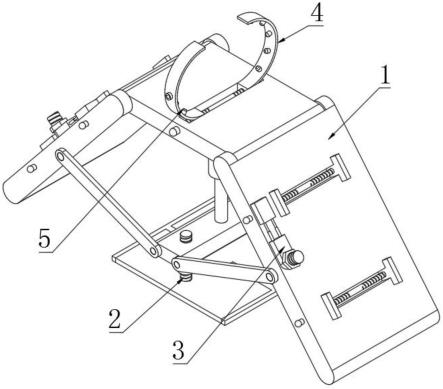
具体实施方式
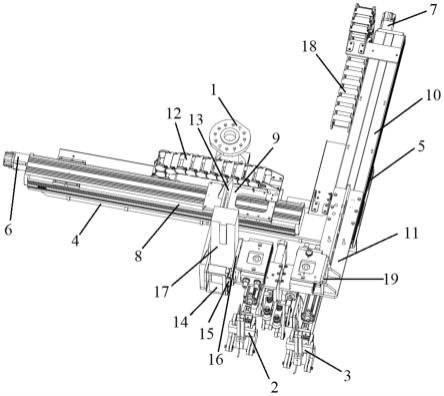
19.以下参考说明书附图介绍本发明的优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
20.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
实施例
21.钣金涂装线上下件的自动上钩装置由定位机构、机器人以及挂钩机组成。整套的流程是:定位机构将钣金件定位后,机器人通过末端抓手将挂钩机上的挂钩抓取,再移动到定位机构上钩住钣金件送至钣金涂装生产线。
22.如图1所示,本实施例提供了一种用于钣金涂装线上下件的自动上钩的抓手,适于安装在机器人末端,该抓手包括抓手主体、快换法兰1、第一夹爪2和第二夹爪3,快换法兰1固定连接至抓手主体,抓手主体包括横向支架4和纵向支架5,横向支架4和纵向支架5成l形设置,第一夹爪2沿平行于横向支架4的长度方向可移动设置,并被配置为沿抓手主体可竖向移动、水平旋转运动、夹取用于钩住钣金件的挂钩以及利用吸盘吸住钩住的钣金件,第二夹爪3沿纵向支架5的长度延长方向可移动设置,并被配置为沿抓手主体作水平旋转运动、夹取用于钩住钣金件的挂钩以及利用吸盘吸住钩住的钣金件。
23.横向支架4的一端设置有第一伺服电机6,横向支架4的另一端和纵向支架6的一端固定连接,纵向支架5的另一端设置有第二伺服电机7,横向支架4沿其长度方向设置有第一丝杆和第一直线导轨8,第一伺服电机6通过第一联轴器连接第一丝杆,第一直线导轨8的上方可滑动设置第一工作台9,第一工作台9的底部通过第一螺母座可移动设置在第一丝杆上,纵向支架5沿其长度方向设置有第二丝杆和第二直线导轨,第二伺服电机7通过第二联轴器连接第二丝杆,第二直线导轨的上方可滑动设置第二工作台10,第二工作台10的底部通过第二螺母座可移动设置在第二丝杆上。
24.横向支架4的内侧设置有第一拖链12,第一拖链12的一端连接至横向支架4上靠近第一直线导轨8的内侧的中间,第一拖链12的另一端连接至第一工作台9一端的内侧。
25.第一安装板13的一端竖直安装在第一工作台9上,并向横向支架4的外侧延伸,第一安装板13的另一端设置有安装架14,安装架14外侧竖直设置有滑轨15,滑轨15上可滑动设置有移动安装板16,安装架14上设置有第三伺服电机17,第三伺服电机17被配置为驱动移动安装板16沿滑轨15竖向移动,第一夹爪2固定在移动安装板16上。
26.纵向支架5的内侧设置有第二拖链18,第二拖链18的一端连接至纵向支架5上靠近第二直线导轨的内侧的中间,第二拖链18的另一端连接至第二工作台10一端的内侧。
27.第二安装板包括水平部11和竖直部19,水平部11的一端水平安装在第二工作台10上,并向纵向支架5的长度延伸方向延伸,竖直部19竖直安装在水平部11的另一端上,第二夹爪3固定在第二安装板的竖直部19上。
28.第一夹爪2和第二夹爪3的结构类似,以下以第一夹爪2为例详细介绍其结构:如图2、图3和图4所示,第一夹爪2包括安装座20、旋转气缸21、转移板、第一气缸23、压紧杆24、吸盘安装板25、吸盘26、底板31、第二气缸32、夹手气缸33,转移板包括弯折部22和安装部27,弯折部22设置在旋转气缸21的下方,安装部27和弯折部22垂直设置,旋转气缸21侧装在安装座20上,旋转气缸21通过回转台固定在弯折部22上。第一气缸23固定设置在弯折部22上,压紧杆24的一端可枢转连接至安装部27上的第一轴28,第一气缸23的伸出端通过第一连杆29推动压紧杆24围绕第一轴28旋转,压紧杆24的另一端套设弹簧30将吸盘安装板25与压紧杆24垂直相交抵靠在一起,吸盘26固定安装在吸盘安装板25上,吸盘26的开口在压紧杆24的长度方向上和弹簧30相对设置。
29.底板31固定在安装部27的底部,第二气缸32的固定端固定在底板31上,第二气缸32的伸出端连接至第二连杆34的一端,第二连杆34的另一端通过连接支架35连接至底板上的第二轴36,夹手气缸33固定在连接支架35上,夹手气缸33的一对夹手的每一个上分别安装有夹取用于钩住钣金件的挂钩38的夹钩板37。
30.第一夹爪2通过安装座20可拆卸安装在移动安装板16上。
31.类似地,第二夹爪3通过安装座20可拆卸安装在第二安装板的竖直部19上。
32.使用时,机器人带动末端抓手移动到挂钩机附近,第一伺服电机6带动第一丝杆使得第一夹爪2在第一直线导轨8上移动到挂钩机的合适位置,再将第一夹爪2通过竖向移动、水平旋转运动进行位置微调,夹手气缸33上的一对夹手带动夹钩板37夹住挂钩机上的一个挂钩38,类似的,第二伺服电机7带动第二丝杆使得第二夹爪3在第二直线导轨上移动到挂钩机的合适位置,再将第二夹爪3通过水平旋转运动进行位置微调,夹手气缸33上的一对夹手带动夹钩板37夹住挂钩机上的另一个挂钩38。
33.机器人带动末端抓手移动到定位机构附近,第一伺服电机6带动第一丝杆使得第一夹爪2在第一直线导轨8上移动到定位机构的合适位置,再将第一夹爪2通过竖向移动、水平旋转运动进行位置微调,第二气缸32推动连接支架35带动夹手气缸33倾斜至合适的角度,利用夹手气缸33上的一对夹手带动夹钩板37将定位机构上的钣金件上的一个孔勾住,再将夹钩板37调整为竖直方向,夹钩板37与钣金件平行,第一气缸23将吸盘26顶至相对于钣金件的竖直方向,将钣金件吸住。类似地,第二伺服电机7带动第二丝杆使得第二夹爪3在第二直线导轨上移动到定位机构的合适位置,再将第二夹爪2通过水平旋转运动进行位置微调,第二气缸32推动连接支架35带动夹手气缸33倾斜至合适的角度,利用夹手气缸33上的一对夹手带动夹钩板37将定位机构上的钣金件上的另一个孔勾住,再将夹钩板37调整为竖直方向,夹钩板37与钣金件平行,第一气缸23将吸盘26顶至相对于钣金件的竖直方向,将钣金件吸住。通过第一夹爪2和第二夹爪3将钣金件牢牢勾住,最后送至钣金涂装生产线。
34.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员
依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。