一种智能ai视觉伸缩机械手
技术领域
1.本发明涉及一种机械手,特别是一种智能ai视觉伸缩机械手。
背景技术:
2.口腔治疗需要口腔手机、根管治疗小器械、口镜、探针、拔牙钳等器械,使用后由医务人员人工清点分拣,再人工放至相应的使用后器械存放处,最后统一送至消毒供应室进行消毒。此过程中有二个问题较为突出:一是使用后的锐利口腔器械在运输过程中,人工的频繁拿放锐利器械极易对医护人员造成锐器伤;二是器械清点依靠人工手动分拣与计数,不仅有造成锐器伤的风险,而且有可能造成器械遗漏和丢失等可能,且消耗人力资源,效率低下和差错率高。为了解决上述问题,研究人员设想开发出一款能够自动分拣医疗器械的分拣机器人,通过识别器械种类,操控机械臂抓取相应种类的器械至相应位置,这就要求机械臂具有灵活的位置调节能力。但是,现有的机械臂体积较大,抓取活动范围较窄,无法适用于口腔医疗器械的分拣和抓取。因此,现有的技术存在着体积较大以及位置调节范围较窄的问题。
技术实现要素:
3.本发明的目的在于,提供一种智能ai视觉伸缩机械手。本发明具有体积小巧以及具有极大位置调节范围的特点。
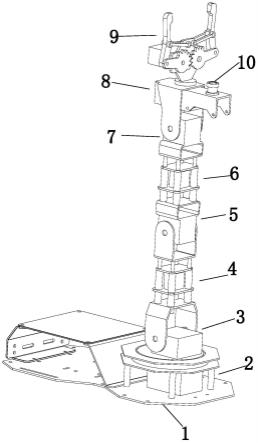
4.本发明的技术方案:一种智能ai视觉伸缩机械手,包括底座,底座上设有整体转向机构,整体转向机构上方设有整体弯曲机构,整体弯曲机构上方设有下伸缩机构,下伸缩机构上方设有下弯曲机构,下弯曲机构上方设有上伸缩机构,上伸缩机构上方设有上弯曲机构,上弯曲机构上方设有卡爪转向机构,卡爪转向机构上方设有卡爪机构;所述卡爪转向机构上设有ai摄像头。
5.前述的一种智能ai视觉伸缩机械手中,所述整体转向机构包括位于底座上方的底盘固定架,底盘固定架上设有旋转座,旋转座下方设有底部转向总线舵机。
6.前述的一种智能ai视觉伸缩机械手中,所述整体弯曲机构包括固定于旋转座上方的大扭力总线舵机,大扭力总线舵机输出端设有第一支架。
7.前述的一种智能ai视觉伸缩机械手中,所述下伸缩机构包括固定于第一支架上方的下伸缩杆套管,下伸缩杆套管上设有固定底板,固定底板上设有下丝杠电机,下丝杠电机上设有下丝杆,下伸缩杆套管内设有下伸缩杆,下伸缩杆的上端设有固定支架,下丝杆的上端设有与下伸缩杆相配合的下升降板。
8.前述的一种智能ai视觉伸缩机械手中,所述下弯曲机构包括位于固定支架上的下智能总线舵机,且下智能总线舵机与固定支架之间为转动连接;所述下智能总线舵机上端设有缓冲支架。
9.前述的一种智能ai视觉伸缩机械手中,所述上伸缩机构包括位于缓冲支架上方的上伸缩杆套管,上伸缩杆套管上设有安装板,安装板上设有上丝杠电机,上丝杠电机上设有
上丝杆,上伸缩杆套管内设有上伸缩杆,上伸缩杆的上端设有上弯曲机构,上丝杆的上端设有与上伸缩杆相配合的上升降板。
10.前述的一种智能ai视觉伸缩机械手中,所述上弯曲机构包括上智能总线舵机,上智能总线舵机上设有转动支架。
11.前述的一种智能ai视觉伸缩机械手中,所述卡爪转向机构包括固定于转动支架上的卡爪转向总线舵机,卡爪转向总线舵机上端设有卡爪旋转底座;所述卡爪转向总线舵机一侧设有支架,ai摄像头位于支架上。
12.前述的一种智能ai视觉伸缩机械手中,所述卡爪机构包括固定于卡爪旋转底座上的支撑架,支撑架一侧设有两个相互啮合的齿轮连接杆,齿轮连接杆的外端连接有卡爪,卡爪中部与支撑架之间还设有连接杆;所述支撑架的另一侧还设有与齿轮连接杆相配合的防堵转总线舵机。
13.与现有技术相比,本发明由整体转向机构、整体弯曲机构、上伸缩机构、上弯曲机构、下伸缩机构、下弯曲机构、卡爪转向机构和卡爪机构组成,从而可以实现多维度和多角度的灵活转换,抓取角度很大,极大的方便了对处于不同位置角度的医疗器械的抓取;而且,本发明的整体结构小巧简单,安装方便,操作也十分的简单。另外,通过设置ai摄像头,来识别相应种类的器械,从而可以极大的提高抓取的精度。而且,本发明的卡爪机构由支撑架、两个相互啮合的齿轮连接杆、卡爪和连接杆组成,保证抓取的稳定性,防止在抓取物品的过程中物品发生掉落。综上所述,本发明具有体积小巧以及具有极大位置调节范围的特点。
附图说明
14.图1是本发明的结构示意图;
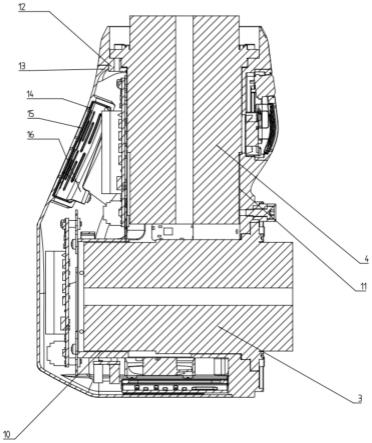
15.图2是图1下半部分的局部视图;
16.图3是图1上半部分的局部视图;
17.图4是本发明的侧视图。
18.附图中的标记为:1-底座,2-整体转向机构,3-整体弯曲机构,4-下伸缩机构,5-下弯曲机构,6-上伸缩机构,7-弯曲机构,8-卡爪转向机构,9-卡爪机构,10-ai摄像头,201-底盘固定架,202-旋转座,203-底部转向总线舵机,301-大扭力总线舵机,302-第一支架,401-下伸缩杆套管,402-固定底板,403-下丝杠电机,404-下丝杆,405-下伸缩杆,406-固定支架,407-下升降板,501-下智能总线舵机,502-缓冲支架,601-上伸缩杆套管,602-安装板,603-上丝杠电机,604-上丝杆,605-上伸缩杆,606-上升降板,701-上智能总线舵机,702-转动支架,801-卡爪转向总线舵机,802-卡爪旋转底座,803-支架,901-支撑架,902-齿轮连接杆,903-卡爪,904-连接杆,905-防堵转总线舵机。
具体实施方式
19.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
20.实施例。一种智能ai视觉伸缩机械手,构成如图1至图4所示,包括底座1,底座1上设有整体转向机构2,整体转向机构2上方设有整体弯曲机构3,整体弯曲机构3上方设有下
伸缩机构4,下伸缩机构4上方设有下弯曲机构5,下弯曲机构5上方设有上伸缩机构6,上伸缩机构6上方设有上弯曲机构7,上弯曲机构7上方设有卡爪转向机构8,卡爪转向机构8上方设有卡爪机构9;所述卡爪转向机构8上设有ai摄像头10。
21.抓取物品:车针,扩大针,牙科手机、拔牙钳、持针器等
22.抓取重量:≤250g
23.所述整体转向机构2包括位于底座1上方的底盘固定架201,底盘固定架201上设有旋转座202,旋转座202下方设有底部转向总线舵机203。工作过程为:底部转向总线舵机的工作,会带动旋转座进行旋转作业,旋转座的旋转作业带动整体弯曲机构及其上侧零部件的旋转。
24.所述整体弯曲机构3包括固定于旋转座202上方的大扭力总线舵机301,大扭力总线舵机301输出端设有第一支架302。
25.工作过程:第一支架与大扭力总线舵机之间为转动连接,大扭力总线舵机工作,会带动第一支架进行相应的转动,第一支架的转动,会带动安装在其上方的零部件的转动。
26.所述下伸缩机构4包括固定于第一支架302上方的下伸缩杆套管401,下伸缩杆套管401上设有固定底板402,固定底板402上设有下丝杠电机403,下丝杠电机403上设有下丝杆404,下伸缩杆套管401内设有下伸缩杆405,下伸缩杆405的上端设有固定支架406,下丝杆404的上端设有与下伸缩杆405相配合的下升降板407。
27.工作过程:下丝杠电机工作,带动下丝杆进行相应的伸长作业,下丝杆的伸长作业会带动下升降板沿着下伸缩杆上升,直至下升降板与固定支架接触,下升降板继续上升,带动固定支架上升,固定支架的上升,带动安装在固定支架下方的下伸缩杆沿着下伸缩杆套管进行上升作业。
28.所述下弯曲机构5包括位于固定支架406上的下智能总线舵机501,且下智能总线舵机501与固定支架406之间为转动连接;所述下智能总线舵机501上端设有缓冲支架502。工作过程:下智能总线舵机工作,使得下智能总线舵机绕着固定支架旋转,进而使得安装在缓冲支架上方的零部件发生相应的弯曲转动。
29.所述上伸缩机构6包括位于缓冲支架502上方的上伸缩杆套管601,上伸缩杆套管601上设有安装板602,安装板602上设有上丝杠电机603,上丝杠电机603上设有上丝杆604,上伸缩杆套管601内设有上伸缩杆605,上伸缩杆605的上端设有上弯曲机构7,上丝杆604的上端设有与上伸缩杆605相配合的上升降板606,上升降板与上弯曲机构相配合。上伸缩机构的工作过程与下伸缩机构的工作过程相同。
30.所述上弯曲机构7包括上智能总线舵机701,上智能总线舵机701上设有转动支架702。工作过程:上智能总线舵机工作,带动转动支架旋转,转动支架的旋转会带动固定在其上方的零部件发生相应的弯曲转动。
31.所述卡爪转向机构8包括固定于转动支架702上的卡爪转向总线舵机801,卡爪转向总线舵机801上端设有卡爪旋转底座802;所述卡爪转向总线舵机801一侧设有支架803,ai摄像头10位于支架803上。工作过程为:卡爪转向总线舵机工作,带动卡爪旋转底座旋转,进而带动卡爪机构发生旋转。
32.所述卡爪机构9包括固定于卡爪旋转底座802上的支撑架901,支撑架901一侧设有两个相互啮合的齿轮连接杆902,齿轮连接杆902的外端连接有卡爪903,卡爪903中部与支
撑架901之间还设有连接杆904;所述支撑架901的另一侧还设有与齿轮连接杆902相配合的防堵转总线舵机905。齿轮连接杆与卡爪、卡爪与连接杆以及连接杆与支撑架之间均为转动连接。工作过程:防堵转总线舵机工作,带动两个齿轮连接杆的齿轮端发生旋转啮合,两个齿轮连接杆旋转时,其与卡爪连接端会带动卡爪发生旋转和移动,卡爪中部的连接杆起到支撑和限位的作用,在卡爪的动作过程中,也会随之发生相应的动作。
33.本发明的工作过程:ai摄像头识别待抓取的物品后,控制器根据抓取位置,控制整体转向机构工作,带动机械臂的整体转向,通过控制整体弯曲机构带动下伸缩机构、下弯曲机构、上伸缩机构、上弯曲机构、卡爪转向机构和卡爪机构的弯曲,通过下伸缩机构的动作带动下弯曲机构、上伸缩机构、上弯曲机构、卡爪转向机构和卡爪机构的伸缩;通过下弯曲机构带动其上侧部分结构的弯曲;上伸缩机构带动其上侧结构的伸缩,上弯曲机构带动卡爪转向机构和卡爪机构的弯曲,卡爪转向机构单独带动卡爪机构的转向,最后通过卡爪机构完成对目标器械的抓取和放置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。