1.本发明属于机械手爪技术领域,特别涉及基于五杆机构与欠驱动形式的机械手爪。
背景技术:
2.随着科学技术的进步,工业生产对机械手爪的要求愈来愈多,从最初的对单一物料的抓取,到现在的对多种物料的稳定抓取与操作。由于在工业生产中要求较高的效率和较高的传力能力,因此在工业中常用连杆机构进行设计;连杆机构的设计过程复杂,并且几何尺寸较大,很少应用于多关节的机械手爪上。但是多关节机械手爪对抓取的操作性、柔顺性和稳定性有极大的帮助,因此需要设计一种具有较高传力性能的多关节机械手爪,用于工业中对多种不同形状和硬度的物料的抓取和操作。
技术实现要素:
3.为了克服上述现有技术的缺点,本发明的目的在于提供基于五杆机构与欠驱动形式的机械手爪,具有较高的力传递性能,可用于工业中对多种不同形状和硬度的物料抓取和操作。
4.为了达到上述目的,本发明采取的技术方案如下:
5.基于五杆机构与欠驱动形式的机械手爪,包括手指部分、手掌部分、手指传感部分,手指部分安装在手掌部分上,手指部分的三个指根安装手指驱动部分,手指部分的三个指段腹部安装手指传感部分。
6.所述的手指部分包括三个关节,每一个关节包括指根段4、指中段7、指尖段9;指根段4上部与指中段7下部通过转动副铰接,指中段7上部和指尖段9下部通过转动副铰接,指根段4下部通过转动副与曲柄5连接;曲柄5的输入和驱动电机13连接,驱动电机13安装在指根段4底部;曲柄5输出与连杆a6一端连接;指根段4、指中段7和连杆a6另一端通过转动副与连杆b8连接;连杆b8另一端通过转动副与连杆c10一端连接,连杆c10另一端通过转动副和指尖段9连接;连杆b8与指中段7之间连接有扭转弹簧11;当指中段7遇到阻力时,驱动电机13通过曲柄5和连杆a6持续作用在连杆b8上,此时扭转弹簧11被压缩,通过连杆c10作用在指尖段9上;指根段4、曲柄5、连杆a6和连杆b 8构成固定端距离为0的五杆机构。
7.所述的手掌部分包括手掌1,手掌1上固定安装有旋转电机15,旋转电机15的输出通过推力球轴承2和手指支座3底部连接,手指支座3上部和指根段4下部连接,手指支座3通过旋转电机15的带动实现手指的转动,以调整抓取接触点。
8.所述的手指传感部分包括压力传感器12和橡胶贴片18;压力传感器12安装在指根段4、指中段7、指尖段9的指腹部,压力传感器12上覆盖有橡胶贴片18。
9.手指部分采用了五杆机构与欠驱动机构串联的方式,使得手指三个关节中两个关节由驱动电机13直接控制,第三个关节通过欠驱动的方式间接控制,实现精准捏取和包络抓取;面对尺寸小的零件时,采用精准捏取的模式,通过旋转电机控制两个关节的转动,此
时为全驱动;面对尺寸大且形状复杂的零件时,采用包络抓取的模式,通过旋转电机控制所有关节;此时为欠驱动。
10.所述的手指传感部分采用了多个压力传感器12,用于检测每个接触点施加的接触力,便于对抓取力的精准控制。
11.所述的橡胶贴片18用于提高手指与物料之间的摩擦力,以提高抓取和操作的稳定性。
12.所述的驱动电机13和旋转电机15均选择了直流无刷电机。
13.与现有技术相比,本发明的有益效果为:
14.本发明提供了一种基于五杆机构与欠驱动形式的机械手爪,可以应用于具有多种形状、尺寸以及材料均不相同的物料的抓取与操作中。采用了连杆传动的形式,极大的提高了传力能力,可以完成对质量较大另加的抓取;采用了五杆机构和欠驱动机构相结合的方式,可以极大的提高了手爪的灵活性,提高了机械手爪的抓取柔顺性和操作的灵活性;添加了压力传感器;可以提高对接触力的控制能力,使得手爪能完成对易碎易变形的物料的抓取。
附图说明
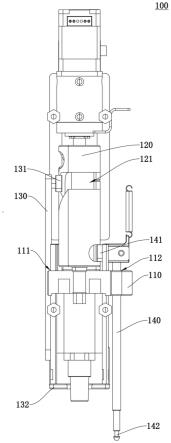
15.图1为本发明的结构示意图。
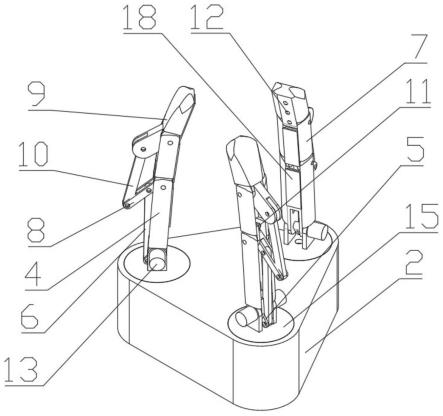
16.图2为本发明手指部分连接机构连接简图。
17.图3为本发明手指传感部分的结构示意图。
18.图4为本发明手掌部分的结构示意图。
具体实施方式
19.以下结合附图对发明进一步详细说明,以下实施例仅用于更清楚的说明本发明的技术方案,本领域普通技术人员在本发明实施例方案基础上做出的改变属本发明的保护范围
20.如图1所示,基于五杆机构与欠驱动形式的机械手爪,包括手指部分、手掌部分、手指传感部分,手指部分安装在手掌部分上,手指部分的三个指根安装手指驱动部分,手指部分的三个指段腹部安装手指传感部分。
21.如图1、图2所示,所述的手指部分包括三个关节,每一个关节包括驱动电机13、指根段4、指中段7、指尖段9、曲柄5、连杆a6、连杆b8、连杆c10以及扭转弹簧11;指根段4上部与指中段7下部通过转动副铰接,指中段7上部和指尖段9下部通过转动副铰接,指根段4下部通过转动副与曲柄5连接;曲柄5的输入和驱动电机13连接,驱动电机13安装在指根段4底部;曲柄5输出与连杆a6一端连接;指根段4、指中段7和连杆a6另一端通过转动副与连杆b8连接;连杆b8另一端通过转动副与连杆c10一端连接,连杆c10另一端通过转动副和指尖段9连接;连杆b8与指中段7之间连接有扭转弹簧11;根段4、曲柄5、连杆a6和连杆b8构成固定端之间的距离为0的特殊的五杆机构。
22.如图1、图4所示,所述的手掌部分包括手掌1、旋转电机15、手指支座3以及推力球轴承2;手掌1上固定安装有旋转电机15,旋转电机15的输出通过推力球轴承2和手指支座3底部连接,手指支座3上部和指根段4下部连接。
23.如图1、图3所示,所述的手指传感部分包括压力传感器12和橡胶贴片18;压力传感器12安装在指根段4、指中段7、指尖段9的指腹部,压力传感器12上覆盖有橡胶贴片18;在不触发扭转弹簧11情况下,通过控制两个驱动电机13可以准确控制指根段4和指中段7;当扭转弹簧11被压缩时,手爪改变成欠驱动模式,易于完成包络抓取;本发明可以应用于具有多种形状、尺寸以及材料均不相同的物料的抓取与操作中,采用了连杆传动的形式,极大的提高了传力能力,可以完成对质量较大另加的抓取;采用了五杆机构和欠驱动机构相结合的方式,可以极大的提高了手爪的灵活性,提高了机械手爪的抓取柔顺性和操作的灵活性;添加了压力传感器;可以提高对接触力的控制能力,使得手爪能完成对易碎易变形的物料的抓取。
24.在指根段4、指中段7、指尖段9都上均匀安装着多个压力传感器12,通过多个压力传感器12的数据,可以预测到零部件与指腹的接触位置的大致范围以及接触力的大小。通过反馈回来的压力大小,通过阻抗控制器或者力/位混合控制器可以完成手指的接触力的准确控制。本发明可以提高刚性手爪的柔顺性,用于完成对易碎、易变形的零件的抓取。
25.手指段的腹部添加了硬度较大的橡胶贴片18,减小对压力传感器数据的影响,并且用于提高手指与零部件之间的摩擦系数,防止在抓取过程中零部件的滑落,以提高抓取和操作的稳定性。
26.手指部分采用了五杆机构与欠驱动机构串联的方式形成机械手,使得手指三个关节中两个关节可以由驱动电机13直接控制,第三个关节通过欠驱动的方式间接控制;通过控制两个驱动电机13可以准确控制指根段4和指中段7,当扭转弹簧11被压缩时,手爪改变成欠驱动模式,控制两个驱动电机13,结合实际中指中段7受到的阻力大小,可以完成对指根段4、指中段7以及指尖段9的控制。本实施例综合考虑了通过使用五杆机构与欠驱动串联的方式,提高了单电机欠驱动手爪的灵巧性,减小了全驱动手爪的结构复杂程度。
27.本发明手爪具有多种抓取模式,可以实现精准抓取和包络抓取;面对尺寸较小的零件时,采用精准抓取的模式,通过驱动电机13控制两个关节的转动,此时为全驱动;面对尺寸较大且形状复杂的零件时,采用包络抓取的模式,通过驱动电机13控制所有关节;此时为欠驱动。通过结合实际情况调整扭转弹簧11的刚度,可以改变精准抓取模式和包络抓取模式之间切换的阈值。本发明完成了针对工业中出现的多种不同形状、尺寸的零部件的抓取。
28.所述的驱动电机13和旋转电机15均选择了直流无刷电机,以提高其工作的稳定性。
29.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。