1.本发明涉及一种面向经自然腔道手术的变刚度机器人,属于机器人技术领域。
背景技术:
2.经自然腔道手术是指经过食管、胃、结(直)肠、阴道和膀胱等自然腔道,进入胸腔、腹腔或纵膈内进行疾病诊疗的全新微创手术。与传统的手术相比,经自然腔道手术具有痛苦少、无体表疤痕、恢复快等优势,是未来微创手术发展的必然趋势。自2006年国际上首次提出经自然腔道手术概念以来,我国学者很快接受了这一概念并较早的开始了研究。国内越来越多的医疗机构正在逐步展开经自然腔道手术的临床工作。
3.经自然腔道手术可用于腹腔、胸腔、盆腔、纵膈内疾病和腹膜、胸膜病变(包括异常淋巴结、包块或肿瘤)的探查和活检。经自然腔道治疗技术包括已经开展的巨大肝囊肿开窗术、保胆胆囊结石取石术及胆囊息肉摘除术、胆囊切除术、阑尾切除术、宫外孕手术、卵巢囊肿剥除术、疝修补术、肠管粘连松解术、食管或胃肠道壁外的良性肿瘤切除等一系列手术。同时,对于其他系统(非胸、腹、纵膈腔)疾病的诊断和治疗也具有潜在的应用前景。
4.目前经自然腔道手术尚处于实验室阶段。该手术的手术器械需要经由人体的自然腔道达到病灶所在,然后进行手术操作。因而手术器械必须拥有很好的柔顺性,避免通过时对体内组织造成损伤。但手术操作需要一定的操作力,这就要求手术器械拥有一定的刚度,避免手术时手术器械发生形变而导致手术失败。这种需要手术器械具有刚性和柔性两种工作状态的问题是限制经自然腔道手术广泛应用的重要难题。
5.有鉴于此,开发一种变刚度机器人,用于解决上述缺陷,显然是有必要的。
技术实现要素:
6.本发明的发明目的是提供一种面向经自然腔道手术的变刚度机器人,实现微小尺寸柔性机械臂刚度的无级调节。
7.为达到上述发明目的,本发明采用的技术方案是:一种面向经自然腔道手术的变刚度机器人,包括执行机构和用于驱动执行机构的驱动机构,所述执行机构包括至少一条机械手,所述机械手包括第一关节和与第一关节串联的第二关节,所述第一关节由多个第一关节基体通过第一关节驱动绳、第二关节驱动绳和张紧绳串联而成,所述第二关节由多个第二关节基体通过第二关节驱动绳和张紧绳串联而成,所述第一关节基体和第二关节基体的头部均为凸出球面,尾部为凹陷球面,所述第一关节基体设有一位于中心位置的张紧绳孔、四个等间隔周向分布的第二关节驱动绳孔以及间隔设置在第二关节驱动绳孔之间的第一关节驱动绳孔,所述第二关节基体上设有一位于中心位置的张紧绳孔和四个等间隔周向分布的第二关节驱动绳孔,所述张紧绳的一端穿过第一关节和第二关节上的张紧绳孔并连接在第二关节的头部,所述张紧绳的另一端与驱动机构连接,所述第二关节驱动绳的一端穿过第一关节上的第二关节驱动绳孔和第二关节上
的第二关节驱动绳孔并连接在第二关节的头部,所述第二关节驱动绳的另一端与驱动机构连接,所述第一关节驱动绳的一端穿过第一关节上的第一关节驱动绳孔并连接在第一关节的头部,所述第一关节驱动绳的另一端与驱动机构连接,所述第二关节驱动绳上还套设有弹簧管,所述弹簧管的一端与第二关节的头部连接,另一端与驱动机构连接。
8.优选地,所述驱动机构包括机架、多个设置在机架上的驱动绳预紧机构、设置在机架前方的阶梯架、多个设置在机架上的张紧机构、设置在机架上的弹簧管架,所述机架包括上板、底板以及上板与底板之间的两个侧板,所述阶梯架通过螺栓固定在上板上,所述阶梯架上设有多个用于穿设绳子的阶梯孔,所述弹簧管架上设有多个阶梯孔,用于固定弹簧管一端和通过驱动绳。
9.进一步的技术方案中,所述驱动绳预紧机构包括电机架、绕线轮、滑块、电机和预紧螺栓,所述电机设置在滑块下方,所述绕线轮设置在滑块上方并与电机的转轴连接,所述滑块通过预紧螺栓滑动设置在电机架上,使得滑块具有在电机架平面上前后运动的自由度,位于对称位置上的关节驱动绳的端部反向连接至同一绕线轮上,。
10.进一步的技术方案中,所述张紧机构包括设置在上板上的绕线轮与上板下方的电机,所述绕线轮通过紧定螺钉连接在电机的转轴上,所述张紧绳的端部与张紧机构的绕线轮连接,对称分布的两根驱动绳只控制一个自由度,长度变化正好相反,通过一个电机控制,电机转动时一根伸长,一根缩短。
11.上述技术方案中,转动预紧螺栓控制滑块和电机前后移动可以使缠绕在绕线轮上的驱动线预紧,提高控制精度。
12.本技术技术方案中,基体数量与其活动范围成正比,一般可根据环境约束做适当增减,但不能低于10个。
13.本发明中,其执行机构优选为两条仿蛇型的柔性变刚度机械手,每条机械手具有两个柔性变刚度关节,每个关节又有两个弯曲自由度。
14.本发明中,所谓变刚度是指该机械手的刚度可以自主调节,通过自然腔道时表现为柔性,能顺利通过人体的自然腔道。手术时可自主提升刚度,负载能力增强。
15.本发明中,关节基体通过张紧绳和驱动绳串联而成,基体头部为凸出球面,尾部为凹陷球面。基体头尾相接,类似万向节,能绕配合面转动。张紧绳能够控制基体连接的松紧程度,连接越紧,相互间的压力越大,则接触面的摩擦力越大,刚度越高。反之则刚度越低。张紧绳布置在柔性臂的中心线,该线的长度不随机器人姿态而变化,该绳的拉力亦不会影响机器人的姿态。利用该绳的张紧力调节机器人的刚度不与分布在圆周的驱动绳干涉,可以实现机器人的刚度控制与姿态控制分离,使机器人更容易控制。
16.本发明中,弹簧管的长度是固定的,所以在弹簧管范围内的第二关节驱动绳的长度是固定的,可以适当第二关节驱动绳在第一关节内的长度一定,从而使第二关节驱动绳长度与第一关节姿态分离,达到解耦的目的。
17.由于上述技术方案运用,本发明与现有技术相比具有下列优点:1.本发明的细长结构能够顺利通过人体的食道、胃和结肠等人体的自然通道。
18.2.本发明的执行机构刚度可以实时控制,可以根据应用需求调节到合适的刚度,
在通过人体的自然腔道时可以有效的解决单一刚度柔性器械容易产生刚性太大导致挤压组织产生不适和弯曲半径小处容易穿孔或刚性太小容易在直径较大的弯道处自身形成回路无法前进的问题。
19.3.本发明能够解决经自然腔道手术手术器械操作力不足的问题,在执行较大负载工作时能够自主提升刚度,避免发生形变导致手术事故。能很大程度提升手术的安全性。
20.4.本发明实现了运动控制与刚度控制的分离,控制方案容易实现。
21.5.本发明实现了变刚度柔性结构的微小型化,不需要额外的变刚度机构,依靠本身的结构特性即可实现变刚度,很大程度上缩小了变刚度结构的尺寸。
22.6.本发明还能用于航空发动机的检测与维修。
23.7. 本发明还能执行诸如地震搜救等复杂狭窄环境下的勘测任务。
附图说明
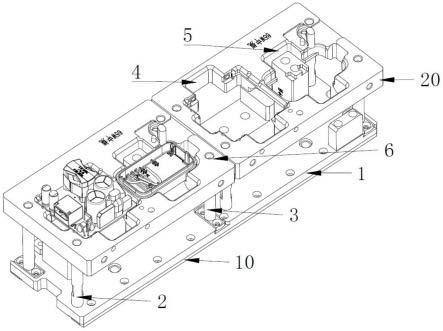
24.图1是本发明的整体结构示意图。
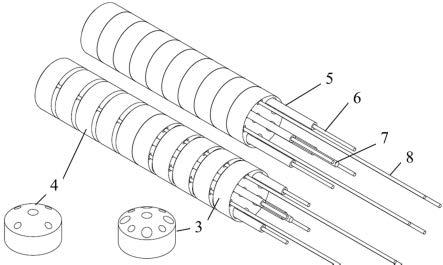
25.图2是本发明的执行机构的结构示意图。
26.图3是本发明的驱动机构的俯视结构示意图。
27.图4是本发明的驱动机构的整体结构示意图。
28.图5是本发明的驱动绳预紧机构的结构示意图。
29.图6是本发明的驱动原理示意图。
30.其中:1、执行机构;2、驱动机构;3、第一关节基体;4、第二关节基体;5、弹簧管;6、第二关节驱动绳;7、张紧绳,8、第一关节驱动绳;9、阶梯架;10、上板;11、驱动绳;12、张紧绳;13、弹簧管架;14、侧板;15、底板;16、绕线轮;17、电机架;18、滑块;19、预紧螺栓;20、电机。
具体实施方式
31.下面结合附图及实施例对本发明作进一步描述:实施例一:参见图1所示,一种面向经自然腔道手术的变刚度机器人,包括执行机构1和用于驱动执行机构1的驱动机构2,参见图2所述,为执行机构1的结构示意图,执行机构1包括两条机械手,每条机械手包括第一关节和与第一关节串联的第二关节,第一关节由多个第一关节基体3通过第一关节驱动绳8、第二关节驱动绳6和张紧绳7串联而成,第二关节由多个第二关节基体4通过第二关节驱动绳6和张紧绳7串联而成,第一关节基体3和第二关节基体4的头部均为凸出球面,尾部为凹陷球面,第一关节基体3设有一位于中心位置的张紧绳孔、四个等间隔周向分布的第二关节驱动绳孔以及间隔设置在第二关节驱动绳孔之间的第一关节驱动绳孔,第二关节基体4设有一位于中心位置的张紧绳孔和四个等间隔周向分布的第二关节驱动绳孔,张紧绳7的一端穿过第一关节和第二关节的张紧绳孔并连接在第二关节的头部,张紧绳的另一端与驱动机构连接,第二关节驱动绳6的一端穿过第一关节上的第二关节驱动绳孔和第二关节上的第二关节驱动绳孔并连接在第二关节的头部,第二关节驱动绳6的另一端与驱动机构连接,第一关节驱动绳8的一端穿过第一关节上的第一关节驱动绳孔并连接在第一关节
的头部,第一关节驱动绳8的另一端与驱动机构连接,第二关节驱动绳6上还套设有弹簧管5,弹簧管5的一端与第二关节的头部连接,另一端与驱动机构的弹簧管架13连接。
32.本实施例中,参见图3或图4所示,为驱动机构不同视角的结构示意图。驱动机构包括机架、设置在机架上的驱动绳预紧机构、设置在机架前方的阶梯架9、2个设置在机架上的张紧机构、设置在机架上的弹簧管架13,所述机架包括上板10、底板15以及上板10与底板15之间的两个侧板14,所述阶梯架9通过螺栓固定在上板10上,所述阶梯架上设有16个阶梯孔,用来固定第一关节的第一个基体,且驱动绳从孔中穿出,连接至对应的绕线轮上,绕线轮16的下方还设有电机,绕线轮16通过紧定螺钉连接在电机的转轴上,弹簧管架上设有16个阶梯孔,用于固定弹簧管一端和通过驱动绳。
33.本实施例中,张紧机构包括设置在上板上的绕线轮16与上板下方的电机,所述绕线轮通过紧定螺钉连接在电机的转轴上,张紧绳12的端部与张紧机构的绕线轮16连接,绕线轮16随电机的转轴一起转动。
34.本实施例中,参见图5所示,为驱动绳预紧机构的结构示意图,驱动绳预紧机构包括电机架17、绕线轮16、滑块18、电机20和预紧螺栓19,电机20设置在滑块18下方,所述绕线轮16设置在滑块18上方并与电机20的转轴连接,所述滑块18通过预紧螺栓19滑动设置在电机架17上,使得滑块18具有在电机架17平面上前后运动的自由度。
35.本实施例中,驱动绳预紧机构的数量为8个,第一关节驱动绳与第二关节驱动绳的端部均绕在绕线轮16上,由电机控制绕线,且位于对称位置上的关节驱动绳的端部反向连接至同一绕线轮上,对称分布的两根驱动绳只控制一个自由度,长度变化正好相反,通过一个电机控制,电机转动时一根伸长,一根缩短。
36.本发明的驱动原理如下:如图6所示,变刚度关节弯曲时呈圆弧状,当关节弯曲时,弯曲方向內圆的圆弧将会对应缩短,外圆的圆弧将会对应伸长。同理,将驱动绳布置在半径为r(r》0)的分度圆上,拉动驱动绳也会导致关节向驱动绳方向弯曲。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。