1.本实用新型涉及焊接机器人技术领域,具体地说,是一种二保焊坐标机器人。
背景技术:
2.二保焊是一种以二氧化碳为保护气体的焊接工艺,二保焊工艺适用于低碳钢、低合金高强度钢、不锈钢等各种中大型钢结构的工程焊接。二保焊相比于氩弧焊等其他焊接工艺,具有焊接生产率高、抗裂性能好、焊接变形小及适应变形范围大等特点,可进行薄板件及中厚板件的焊接生产。
3.目前,现有的二保焊多采用人工焊接方式,人工焊接对人员熟练程度要求较高,操作人员技术不同焊接出来的产品质量也不一样,这样无形中降低了产品质量的稳定性能;另外,由于操作技术人员工资的不断攀升,人工焊接成本也在大幅提升。为此,研究一种适用于二保焊的自动焊接机器人,将有利于提升二保焊的推广应用。
技术实现要素:
4.本实用新型的目的在于克服现有技术中的不足,提供一种二保焊坐标机器人,具有结构紧凑、焊接效率高、自动化程度高及焊接效果好等特点,可实现连续多轴自动焊接,适用于各类合金钢焊接技术领域。
5.为了实现上述目的,本实用新型采取以下的技术方案:一种二保焊坐标机器人,包括底座,所述底座上设有工作台、机械行走机构、焊机和空气压缩机;所述工作台连接机械行走机构,工作台底部设有焊剂回收盒;所述机械行走机构上设有焊剂加注管、焊剂回收管和焊剂存放箱;所述焊机包括焊接电源、焊枪和焊剂盒,所述焊机与所述空气压缩机并排放置;所述工作台、机械行走机构、焊机和空气压缩机通过电气控制系统连接控制。
6.作为一种改进,所述工作台设有两个,且互相对称。
7.作为一种改进,所述工作台上设有气动夹具和定位块,并通过所述空气压缩机提供气源。
8.作为一种改进,所述工作台上设有焊接螺柱,可实现螺柱自动焊接。
9.作为一种改进,所述机械行走机构设有两个,分别控制两个所述工作台。
10.作为一种改进,所述机械行走机构设有x、y、z三轴方向控制器,并分别通过驱动电机实现移动定位。
11.作为一种改进,所述机械行走机构的定位精度为
±
0.5mm。
12.作为一种改进,所述焊剂加注管隐藏在z轴内,所述焊剂回收管为可移动伸缩的软管,可随着y轴移动,且隐藏在y轴的风琴罩内。
13.作为一种改进,所述焊枪设有防碰撞传感器,当所述焊枪与外部物体相碰撞时可自动折回,从而保护焊枪和设备本体。
14.作为一种改进,所述电气控制系统采用智能运动控制系统,配备有若干全数字伺服模块的交流伺服电机,可完成直线插补运算。
15.本实用新型的有益效果:一种二保焊坐标机器人,具有结构紧凑、焊接效率高、自动化程度高及焊接效果好等特点;通过设置对称的两个工作台,两个工作台对应两套机械行走机构,并通过电气控制系统分别控制,可实现双台同时工作,有效提高了焊接效率;通过设置精准定位(
±
0.5mm)的三轴方向控制器,大大提高了焊接精准度,保证焊接质量,同时使得焊接更加美观;另外,通过采用焊机回收盒,方便了焊剂的回收利用,降低焊机消耗成本,同时保证底座更加洁净。
16.本实用新型的二保焊坐标机器人,可灵活调节电磁阀打开的位置,改变加注焊剂的量,每种锚筋对应一种电磁阀的位置,且电磁阀安装位置和加注管的一部分采用模块化设计,隐藏在z轴内;另外,通过快速接头更换电磁阀和起计量作用的加注管,可以改变焊剂的加注量;当焊接完成后,回收电磁阀打开,把焊剂保护盒内的多余焊剂吸走,送入焊剂存放盒内,没有吸走的多余焊剂,吹入工作台下面的焊剂回收盒,到一定量后,手动开启回收电磁阀,把焊剂回收到焊接存放盒内,等待下次焊接时使用,控制简便,省去了人工操作。
附图说明
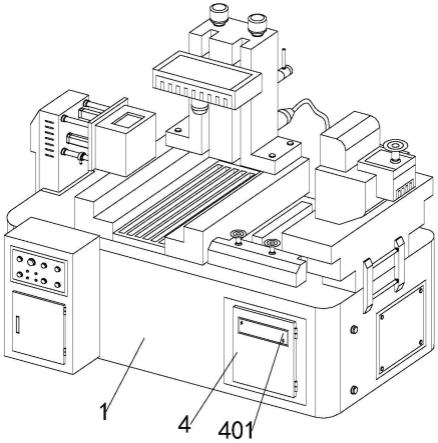
17.图1是本实用新型二保焊坐标机器人的主视图;
18.图2是本实用新型二保焊坐标机器人的左视图;
19.图3是本实用新型二保焊坐标机器人的俯视图。
20.图中:1、底座,2、工作台,3、机械行走机构,4、焊机,5、空气压缩机, 6、焊剂回收盒,7、焊剂加注管,8、焊剂回收管,9、焊剂存放箱,10、焊接螺柱。
具体实施方式
21.下面结合附图与实施方式对本实用新型作进一步详细描述。
22.如图1所示,本实用新型的一种二保焊坐标机器人,包括底座1,所述底座1上设有工作台2、机械行走机构3、焊机4和空气压缩机5;所述工作台 2连接机械行走机构3,工作台2底部设有焊剂回收盒6;所述机械行走机构 3上设有焊剂加注管7、焊剂回收管8和焊剂存放箱9;所述焊机4包括焊接电源、焊枪和焊剂盒,所述焊机4与所述空气压缩机5并排放置;所述工作台2、机械行走机构3、焊机4和空气压缩机5通过电气控制系统连接控制。
23.进一步地,所述工作台2设有两个,且互相对称;具体的,所述工作台2 上设有气动夹具和定位块,并通过所述空气压缩机5提供气源;更进一步地,所述工作台2上设有焊接螺柱10,可实现螺柱自动焊接。
24.进一步地,所述机械行走机构3设有两个,分别控制两个所述工作台2;具体的,所述机械行走机构3设有x、y、z三轴方向控制器,并分别通过驱动电机实现移动定位,并且所述机械行走机构3的定位精度为
±
0.5mm;更进一步地,所述机械行走机构3的控制轴数为6轴。
25.进一步地,所述焊剂加注管7隐藏在z轴内,所述焊剂回收管8为可移动伸缩的软管,可随着y轴移动,且隐藏在y轴的风琴罩内。
26.进一步地,所述焊枪设有防碰撞传感器,实现防碰撞功能;即当所述焊枪与外部物体相碰撞时可自动折回,从而保护焊枪和设备本体。
27.进一步地,所述电气控制系统采用智能运动控制系统,配备有若干全数字伺服模
块的交流伺服电机,优选6个交流伺服电机,可完成6轴的直线插补运算。
28.本实用新型可用其他的不违背本实用新型的精神和主要特征的具体形式来概述。因此,无论从哪一点来看,本实用新型的上述实施方案只能认为是对本实用新型的说明而不能限制本实用新型,因此,在与本实用新型的权利要求书相当的含义和范围内的任何变化,都应认为是包括在权利要求书的范围内。
技术特征:
1.一种二保焊坐标机器人,包括底座(1),其特征在于,所述底座(1)上设有工作台(2)、机械行走机构(3)、焊机(4)和空气压缩机(5);所述工作台(2)连接机械行走机构(3),工作台(2)底部设有焊剂回收盒(6);所述机械行走机构(3)上设有焊剂加注管(7)、焊剂回收管(8)和焊剂存放箱(9);所述焊机(4)包括焊接电源、焊枪和焊剂盒,所述焊机(4)与所述空气压缩机(5)并排放置;所述工作台(2)、机械行走机构(3)、焊机(4)和空气压缩机(5)通过电气控制系统连接控制。2.根据权利要求1所述的二保焊坐标机器人,其特征在于,所述工作台(2)设有两个,且互相对称。3.根据权利要求2所述的二保焊坐标机器人,其特征在于,所述工作台(2)上设有气动夹具和定位块,并通过所述空气压缩机(5)提供气源。4.根据权利要求2或3所述的二保焊坐标机器人,其特征在于,所述工作台(2)上设有焊接螺柱(10),可实现螺柱自动焊接。5.根据权利要求1所述的二保焊坐标机器人,其特征在于,所述机械行走机构(3)设有两个,分别控制两个所述工作台(2)。6.根据权利要求5所述的二保焊坐标机器人,其特征在于,所述机械行走机构(3)设有x、y、z三轴方向控制器,并分别通过驱动电机实现移动定位。7.根据权利要求6所述的二保焊坐标机器人,其特征在于,所述机械行走机构的定位精度为
±
0.5mm。8.根据权利要求1所述的二保焊坐标机器人,其特征在于,所述焊剂加注管(7)隐藏在z轴内,所述焊剂回收管(8)为可移动伸缩的软管,可随着y轴移动,且隐藏在y轴的风琴罩内。9.根据权利要求1所述的二保焊坐标机器人,其特征在于,所述焊枪设有防碰撞传感器,当所述焊枪与外部物体相碰撞时可自动折回,从而保护焊枪和设备本体。10.根据权利要求1所述的二保焊坐标机器人,其特征在于,所述电气控制系统采用智能运动控制系统,配备有若干全数字伺服模块的交流伺服电机,可完成直线插补运算。
技术总结
本实用新型属于焊接机器人技术领域,旨在提供一种二保焊坐标机器人,包括底座,所述底座上设有工作台、机械行走机构、焊机和空气压缩机;所述工作台连接机械行走机构,工作台底部设有焊剂回收盒;所述机械行走机构上设有焊剂加注管、焊剂回收管和焊剂存放箱;所述焊机包括焊接电源、焊枪和焊剂盒,所述焊机与所述空气压缩机并排放置;所述工作台、机械行走机构、焊机和空气压缩机通过电气控制系统连接控制。本实用新型具有结构紧凑、焊接效率高、自动化程度高及焊接效果好等特点,可实现连续多轴自动焊接,适用于各类合金钢焊接技术领域。适用于各类合金钢焊接技术领域。适用于各类合金钢焊接技术领域。
技术研发人员:周庆鹏 薛飞 付冲
受保护的技术使用者:杭州盛忆镐科技有限公司
技术研发日:2021.12.06
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。