1.本实用新型涉及机器人技术领域,尤其涉及全封闭机器人地轨装置。
背景技术:
2.机器人地轨又名机械手第七轴或者机器人行走轴,由于机器人安装行走地轨的成本比直接安装几台机器人的成本更低,投入到生产线上可以提升生产效率,为企业带来更高的经济效益,因此机器人行走地轨慢慢地普及了起来。
3.现有技术中,因为机器人地轨在加工车间运行时,其加工产生的碎屑或者工业垃圾以及灰尘等,极易溅入机器人地轨上,影响机器人地轨正常使用,严重的将造成损毁。为了避免上述问题,需要设计全封闭机器人地轨装置。
技术实现要素:
4.本实用新型的目的是为了解决上述问题而提供全封闭机器人地轨装置。
5.为了实现上述目的,本实用新型提供如下技术方案:
6.本实用新型的全封闭机器人地轨装置,包括机器人地轨本体,还包括:
7.封闭外壳,所述封闭外壳设置在所述机器人地轨本体上用以包裹并封闭所述机器人地轨本体,所述封闭外壳上设有沿机器人行进方向开设的开口;
8.底座,所述底座用以装载机器人,所述底座上设有自所述开口伸入所述封闭外壳内并与所述机器人地轨本体连接的支撑体,所述机器人地轨本体通过驱动所述支撑体移动以驱动所述底座以及机器人移动;
9.以及开口封闭机构,所述开口封闭机构包括:
10.封闭带,所述封闭带用以封堵所述开口,所述封闭带沿所述开口延伸方向设置,所述封闭带的两端分别固定连接在所述封闭外壳上并与所述开口延伸方向上的两个终端相对应;
11.以及封闭位置调节机构,所述封闭位置调节机构设置在所述支撑体上,通过所述封闭位置调节机构调节所述封闭带对所述开口的封堵位置、以使所述封闭带能够随着所述支撑体在所述开口内移动来对所述开口内所述支撑体所在位置之外的区域进行封堵。
12.优选的,所述封闭位置调节机构包括:
13.水平安装板,所述水平安装板的上表面中间位置连接在所述支撑体上伸入所述封闭外壳内的一端面上;
14.第一导向轮、第二导向轮、第三导向轮以及第四导向轮;
15.所述第一导向轮和所述第四导向轮分别设置在所述水平安装板上表面的两侧,所述第一导向轮和所述第四导向轮结构相同,所述第一导向轮与所述第四导向轮相互对称的分布在所述支撑体的两侧;
16.所述第二导向轮和所述第三导向轮分别设置在所述水平安装板的两个端面处,所述第二导向轮和所述第三导向轮结构相同,所述第二导向轮与所述第三导向轮相互对称的
分布在所述支撑体的两侧;
17.所述封闭带的一端自所述水平安装板下方延伸绕过所述第二导向轮变向后再绕过所述第一导向轮变向以朝向远离所述支撑体的方向延伸、另一端自所述水平安装板下方延伸绕过所述第三导向轮变向后再绕过所述第四导向轮变向以朝向远离所述支撑体的方向延伸,通过所述第一导向轮和所述第四导向轮的支撑使所述封闭带压紧在所述封闭外壳内壁上。
18.优选的,所述封闭带上压紧在所述封闭外壳内壁上的一侧表面上设有条形凸起,所述条形凸起为沿所述封闭带延伸方向设置的相互平行的两组。
19.优选的,所述封闭外壳上位于所述开口轴线延伸方向上两侧的内壁上均开设有条形凹槽且与两组所述条形凸起之间一一对应设置。
20.优选的,所述条形凸起与所述条形凹槽之间为过盈配合。
21.优选的,所述第二导向轮和所述第三导向轮上均开设有与所述条形凸起对应的环形凹槽,所述第二导向轮和所述第三导向轮上的所述环形凹槽均为相互平行的两组且均与两组所述条形凸起之间一一对应设置。
22.优选的,所述条形凸起与所述环形凹槽之间为过渡配合。
23.在上述技术方案中,本实用新型提供的全封闭机器人地轨装置,具有以下有益效果:
24.本装置通过支撑体连接机器人地轨本体并支撑底座以驱动机器人行走,并通过封闭外壳外罩在机器人地轨本体上防止加工产生的碎屑或者工业垃圾以及灰尘等溅落在机器人地轨上,并且本装置还通过开口封闭机构封堵容纳支撑体伸出的开口,仅容纳支撑体伸出,极大程度上通过封闭外壳对机器人地轨本体进行密闭处理,其中通过封闭位置调节机构调节封闭带对开口的封堵位置、以使封闭带能够随着支撑体在开口内移动来对开口内支撑体所在位置之外的区域进行封堵。综上所述,本装置能够通过对机器人地轨的密闭处理,防止加工产生的碎屑或者工业垃圾以及灰尘等溅落在机器人地轨上,加强对地轨的防护,使地轨安全运行,提高使用寿命。
附图说明
25.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
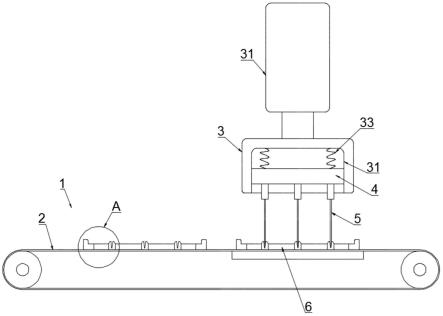
26.图1为本实用新型实施例提供的全封闭机器人地轨装置的结构示意图;
27.图2为本实用新型实施例提供的全封闭机器人地轨装置的第一导向轮和第二导向轮的正视图;
28.图3为本实用新型实施例提供的全封闭机器人地轨装置的第二导向轮的正视图;
29.图4为本实用新型实施例提供的全封闭机器人地轨装置的条形凸起嵌入环形凹槽内的示意图。
30.附图标记说明:
31.1、机器人地轨本体;2、封闭外壳;3、开口;4、底座;5、支撑体;6、封闭带;7、水平安装板;8、第一导向轮;9、第二导向轮;10、第三导向轮;11、第四导向轮;12、条形凸起;13、条
形凹槽;14、环形凹槽。
具体实施方式
32.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
33.请参阅图1-4,全封闭机器人地轨装置,包括机器人地轨本体1,其中,机器人地轨本体1为目前现有的机器人地轨,为公知常识,是本领域工作人员所熟知的,在此不做赘述,还包括:
34.封闭外壳2,封闭外壳2设置在机器人地轨本体1上用以包裹并封闭机器人地轨本体1,封闭外壳2的整体形状及其延伸走向均随着机器人地轨本体1而设置,封闭外壳2上设有沿机器人行进方向开设的开口3,其中的开口3的延伸方向或延伸轨迹也即机器人地轨本体1驱动机器人行走的轨迹,其中本装置的机器人地轨本体1为驱动机器人沿直线移动的地轨;
35.底座4,底座4用以装载机器人,其中机器人装载在底座4上的方式也即常规机器人安装方式,是本领域工作人员所熟知的,在此不做赘述,底座4上设有自开口3伸入封闭外壳2内并与机器人地轨本体1连接的支撑体5,机器人地轨本体1通过驱动支撑体5移动以驱动底座4以及机器人移动;
36.以及开口封闭机构,开口封闭机构包括:
37.封闭带6,封闭带6用以封堵开口3,封闭带6沿开口3延伸方向设置,封闭带6的两端分别固定连接在封闭外壳2上并与开口3延伸方向上的两个终端相对应;其中的封闭带6为软质带状,如橡胶皮带等。
38.以及封闭位置调节机构,封闭位置调节机构设置在支撑体5上,通过封闭位置调节机构调节封闭带6对开口3的封堵位置、以使封闭带6能够随着支撑体5在开口3内移动来对开口3内支撑体5所在位置之外的区域进行封堵。
39.具体的,本装置通过支撑体5连接机器人地轨本体1并支撑底座4以驱动机器人行走,并通过封闭外壳2外罩在机器人地轨本体1上防止加工产生的碎屑或者工业垃圾以及灰尘等溅落在机器人地轨上,并且本装置还通过开口封闭机构封堵容纳支撑体5伸出的开口3,仅容纳支撑体5伸出,极大程度上通过封闭外壳2对机器人地轨本体1进行密闭处理,其中通过封闭位置调节机构调节封闭带6对开口3的封堵位置、以使封闭带6能够随着支撑体5在开口3内移动来对开口3内支撑体5所在位置之外的区域进行封堵。
40.综上所述,本装置能够通过对机器人地轨的密闭处理,防止加工产生的碎屑或者工业垃圾以及灰尘等溅落在机器人地轨上,加强对地轨的防护,使地轨安全运行,提高使用寿命。
41.进一步的,封闭位置调节机构包括:
42.水平安装板7,水平安装板7的上表面中间位置连接在支撑体5上伸入封闭外壳2内的一端面上;
43.第一导向轮8、第二导向轮9、第三导向轮10以及第四导向轮11;其中,通过水平安装板7支撑和安装第一导向轮8、第二导向轮9、第三导向轮10以及第四导向轮11。
44.第一导向轮8和第四导向轮11分别设置在水平安装板7上表面的两侧,第一导向轮
8和第四导向轮11结构相同,第一导向轮8与第四导向轮11相互对称的分布在支撑体5的两侧;
45.第二导向轮9和第三导向轮10分别设置在水平安装板7的两个端面处,第二导向轮9和第三导向轮10结构相同,第二导向轮9与第三导向轮10相互对称的分布在支撑体5的两侧;
46.也即第一导向轮8、第二导向轮9与第三导向轮10、第四导向轮11之间在水平安装板7上对称设置。
47.其中,第一导向轮8、第二导向轮9、第三导向轮10以及第四导向轮11的具体分布形式以及与封闭带6之间的导向支撑形式如下:封闭带6的一端自水平安装板7下方延伸绕过第二导向轮9变向后再绕过第一导向轮8变向以朝向远离支撑体5的方向延伸、另一端自水平安装板7下方延伸绕过第三导向轮10变向后再绕过第四导向轮11变向以朝向远离支撑体5的方向延伸,通过第一导向轮8和第四导向轮11的支撑使封闭带6压紧在封闭外壳2内壁上。这样无论支撑体5沿着开口3朝向哪个方向移动,都通过第一导向轮8和第四导向轮11对封闭带6的变向支撑,再结合第二导向轮9和第三导向轮10对位于水平安装板7下方的封闭带6的支撑,使伸入开口3的支撑体5始终不与封闭带6接触,也即封闭带6对支撑体5让出一开口,且随支撑体5的移动而进行位置改变,也即实现使封闭带6能够随着支撑体5在开口3内移动来对开口3内支撑体5所在位置之外的区域进行封堵。
48.进一步的,封闭带6上压紧在封闭外壳2内壁上的一侧表面上设有条形凸起12,条形凸起12为沿封闭带6延伸方向设置的相互平行的两组。
49.进一步的,封闭外壳2上位于开口3轴线延伸方向上两侧的内壁上均开设有条形凹槽13且与两组条形凸起12之间一一对应设置。
50.具体的,在封闭带6通过第一导向轮8和第四导向轮11压紧在封闭外壳2内壁上时,将使条形凸起12嵌入对应的条形凹槽13内,以使封闭带6固定在封闭外壳2内壁上达到对开口3密封的目的。
51.进一步的,条形凸起12与条形凹槽13之间为过盈配合。过盈配合使条形凸起12与条形凹槽13之间连接更紧密,且不易脱落,以使封闭带6固定在封闭外壳2内壁上不易掉落。
52.进一步的,第二导向轮9和第三导向轮10上均开设有与条形凸起12对应的环形凹槽14,第二导向轮9和第三导向轮10上的环形凹槽14均为相互平行的两组且均与两组条形凸起12之间一一对应设置。
53.进一步的,条形凸起12与环形凹槽14之间为过渡配合。
54.具体的,第二导向轮9和第三导向轮10上的环形凹槽14为了使封闭带缠绕在第二导向轮9和第三导向轮10上时能够对条形凸起12进行避让,且环形凹槽14与条形凸起12之间过渡配合,使条形凸起12进出于环形凹槽14不受摩擦力等反向力干扰,继而不会影响封闭带6与第二导向轮9和第三导向轮10之间相对滚动。且根据封闭带6与第一导向轮8、第二导向轮9与第三导向轮10、第四导向轮11之间的位置关系知,封闭带6上带有条形凸起12的一侧表面缠绕在第二导向轮9和第三导向轮10上,也即封闭带6上带有条形凸起12的一侧表面与第二导向轮9和第三导向轮10之间相贴合,封闭带6上带有条形凸起12的反向侧的表面缠绕在第一导向轮8和第四导向轮11上,也即封闭带6上带有条形凸起12的反向侧的表面与第一导向轮8和第四导向轮11之间相贴合。
55.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。