1.本技术属于机器人技术领域,尤其涉及一种带有电子皮肤的机械臂及机器人。
背景技术:
2.电容式接近觉电子皮肤可以检测接地物体的位置变化情况,被广泛应用在机械臂上。当机械臂发生移动或较大的姿态变化时,电子皮肤中的检测电路的信号地有可能会发生变化,发生基准偏移,电子皮肤有可能在无障碍物的情况下感知到假障碍物,也有可能对实际存在的障碍物感应失效。
技术实现要素:
3.本技术实施例提供了一种带有电子皮肤的机械臂及机器人,可以解决信号地发生基准偏移造成电子皮肤失效的问题。
4.第一方面,本技术实施例提供了一种带有电子皮肤的机械臂,包括多个金属外壳,所有的所述金属外壳串联电连接;
5.至少一个所述金属外壳的外表面上设置有电子皮肤,所述电子皮肤包括检测电路,所述检测电路中的信号地与任意的所述金属外壳电连接。
6.一种可能的实现方式中,所有所述金属外壳之间通过导电线串联电连接,所述导电线位于所述金属外壳的内腔中。
7.一种可能的实现方式中,所述电子皮肤还包括第一绝缘层、第二绝缘层、屏蔽电极和感应电极;
8.所述感应电极设置于所述第一绝缘层的外表面上,所述屏蔽电极设置于所述第一绝缘层的内表面和所述第二绝缘层的外表面之间,所述第二绝缘层的内表面设置于所述金属外壳上;
9.所述检测电路的检测端口与所述感应电极电连接,所述检测电路的检测端口还通过单向传输单元与所述屏蔽电极电连接;所述感应电极用于与靠近所述感应电极的接地物体构成第一电容;所述检测电路的检测端口用于输出激励信号,所述激励信号用于加载在所述感应电极上,所述激励信号还用于通过所述单向传输单元加载在所述屏蔽电极上。
10.一种可能的实现方式中,所述单向传输单元包括运算放大器,所述运算放大器的正向输入端与所述检测电路的检测端口电连接,所述运算放大器的反向输入端分别与所述运算放大器的输出端和所述屏蔽电极电连接。
11.一种可能的实现方式中,所述检测电路包括振荡单元、滤波单元和所述检测端口;
12.所述滤波单元的第一端与所述振荡单元的第一端电连接,所述滤波单元的第二端分别与所述振荡单元的第二端和所述检测端口电连接。
13.一种可能的实现方式中,所述振荡单元包括第一电感和第二电容;
14.所述第一电感的第一端分别与所述第二电容的第一端和所述滤波单元的第一端电连接,所述第一电感的第二端分别与所述第二电容的第二端、所述滤波单元的第二端和
所述检测端口电连接。
15.一种可能的实现方式中,所述滤波单元包括第一电阻、第二电阻、第三电容、第四电容、第五电容和第六电容;
16.所述第一电阻的第一端分别与所述第三电容的第一端和所述振荡单元的第一端电连接,所述第一电阻的第二端分别与所述第五电容的第一端和控制器电连接;所述第二电阻的第一端分别与所述第四电容的第一端、所述振荡单元的第二端和所述检测端口电连接,所述第二电阻的第二端分别与所述第六电容的第一端和所述控制器电连接;所述第三电容的第二端、所述第四电容的第二端、所述第五电容的第二端和所述第六电容的第二端均与所述金属外壳电连接。
17.一种可能的实现方式中,所述屏蔽电极的中心轴与所述感应电极的中心轴重合,所述屏蔽电极的横截面积大于或等于所述感应电极的横截面积。
18.一种可能的实现方式中,所述第一绝缘层镶嵌在所述屏蔽电极上。
19.一种可能的实现方式中,所述感应电极的数量为多个,多个所述感应电极分布设置在所述第一绝缘层的外表面上,多个所述感应电极均与所述检测电路的检测端口电连接。
20.第二方面,本技术实施例提供了一种机器人,包括第一方面中任一项所述的机械臂。
21.本技术实施例与现有技术相比存在的有益效果是:
22.电子皮肤中的检测电路的信号地与任意的金属外壳电连接,所有的金属外壳串联电连接。检测电路中的信号地与所有的金属外壳电连接,增加了检测电路的信号地的稳定性,可以避免由于信号地发生基准偏移造成电子皮肤失效的问题。
附图说明
23.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
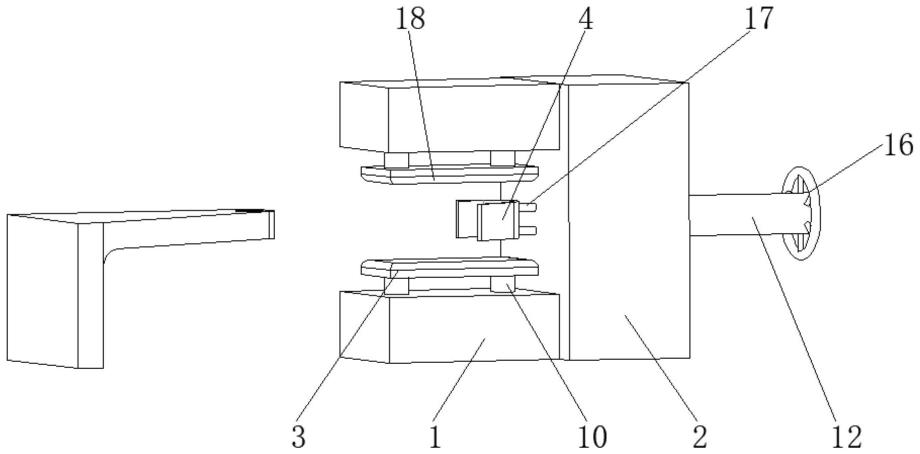
24.图1是本技术一实施例提供的机械臂与检测电路的连接示意图;
25.图2是本技术一实施例提供的机械臂的金属外壳的连接示意图;
26.图3是本技术一实施例提供的电子皮肤的电路连接示意图;
27.图4是本技术一实施例提供的检测电路的电路连接示意图;
28.图5是本技术另一实施例提供的电子皮肤的电路连接示意图。
29.图中:100、检测电路;101、振荡单元;102、滤波单元;103、检测端口; 200、金属外壳;300、感应电极;400、第一绝缘层;500、屏蔽电极;600、第二绝缘层;700、单向传输单元;800、控制器。
具体实施方式
30.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体
细节的其它实施例中也可以实现本技术。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
31.应当理解,当在本技术说明书和所附权利要求书中使用时,术语“包括”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
32.还应当理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
33.如在本技术说明书和所附权利要求书中所使用的那样,术语“如果”可以依据上下文被解释为“当
…
时”或“一旦”或“响应于确定”或“响应于检测到”。类似地,短语“如果确定”或“如果检测到[所描述条件或事件]”可以依据上下文被解释为意指“一旦确定”或“响应于确定”或“一旦检测到[所描述条件或事件]”或“响应于检测到[所描述条件或事件]”。
[0034]
另外,在本技术说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
[0035]
在本技术说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
[0036]
如图1和图2所示,机械臂包括多个金属外壳200,所有的金属外壳200 串联电连接。至少一个金属外壳200的外表面上设置有电子皮肤,电子皮肤包括检测电路100,检测电路100中的信号地与任意的金属外壳200电连接。
[0037]
具体的,电子皮肤中的检测电路100的信号地与任意的金属外壳200电连接,所有的金属外壳200串联电连接。检测电路100中的信号地与所有的金属外壳200电连接,增大了信号地的电阻,从而增加了检测电路100的信号地的稳定性,可以避免由于信号地发生基准偏移造成电子皮肤失效的问题。
[0038]
需要说明的是,图1是为了说明检测电路100中的信号地与金属外壳200 之间的连接关系,因此将检测电路100和金属外壳200分离标识。在实际结构中检测电路100通常需要安装在金属外壳200上。
[0039]
本技术的一个实施例中,所有金属外壳200之间通过导电线串联电连接,导电线位于金属外壳200的内腔中。
[0040]
具体的,导电线位于金属外壳200的内腔中,可以起到保护导电线的作用,从而提高连接的稳定性。
[0041]
图3示出了本技术一实施例提供的电子皮肤的电路连接示意图。参见图3 所示,电子皮肤还包括第一绝缘层400、第二绝缘层600、屏蔽电极500和感应电极300。感应电极300设置于第一绝缘层400的外表面上,屏蔽电极500设置于第一绝缘层400的内表面和第二绝缘层600的外表面之间,第二绝缘层600 的内表面设置于金属外壳200上。检测电路100的检测端口103与感应电极300 电连接,检测电路100的检测端口103还通过单向传输单元700与屏蔽电极500 电连接。
[0042]
具体地,感应电极300用于与靠近感应电极300的接地物体(例如人或其它运动的部件等)构成第一电容,当接地物体与感应电极300的相对位置(二者之间的距离)发生变化时,第一电容的参数也会发生变化。检测电路100采集第一电容的参数,并将第一电容的参数传送至控制器800,控制器800对第一电容的参数进行分析处理后,确定接地物体的位置,由此实现电子皮肤对接地物体位置的检测。
[0043]
检测电路100的检测端口103用于输出激励信号,激励信号用于加载在感应电极300上,激励信号还用于通过单向传输单元700加载在屏蔽电极500上。激励信号同时加载在感应电极300和屏蔽电极500上,使得感应电极300和屏蔽电极500具有相同的电动势,感应电极300和屏蔽电极500之间不会发生电场的影响。屏蔽电极500下方的干扰信号会被主动屏蔽,感应电极300只会检测接地物体的位置,从而提高了电子皮肤检测接地物体位置的精准度。由于感应电极300和屏蔽电极500之间不会发生电场的影响,因此第一绝缘层400和第二绝缘层600可以做薄,进而有助于电子皮肤做薄。
[0044]
需要说明的是,单向传输单元700具有信号的单向传输特征,即检测电路 100的检测端口103输出的激励信号可以由单向传输单元700加载到屏蔽电极 500上,而屏蔽电极500上的信号不能够通过单向传输单元700返回到检测电路100的检测端口103。由此屏蔽电极500上产生的干扰信号不会回流到检测电路100中,实现屏蔽电极500对干扰信号的主动屏蔽,提高电子皮肤检测接地物体位置的精准度。
[0045]
示例性的,如图4所示,单向传输单元700包括运算放大器u1,运算放大器u1的正向输入端与检测电路100的检测端口103电连接,运算放大器u1的反向输入端分别与运算放大器u1的输出端和屏蔽电极500电连接。
[0046]
具体地,运算放大器u1的反向输入端与输出端电连接,运算放大器u1正向输入端输入的信号即为输出端输出的信号,由此确保加载到感应电极300和屏蔽电极500上的信号相同,感应电极300和屏蔽电极500之间不会发生电场的影响。屏蔽电极500下方的干扰信号会被主动屏蔽,感应电极300只会检测接地物体的位置,从而提高了电子皮肤检测接地物体位置的精准度。
[0047]
需要说明的是,单向传输单元700除了使用上述的运算放大器u1之外,还可以使用二极管,二极管的阳极与检测电路100的检测端口103电连接,二极管的阴极与屏蔽电极500电连接。二极管也可以实现信号的单向传输,并且还可以确保加载到感应电极300和屏蔽电极500上的信号相同,使感应电极300 和屏蔽电极500之间不会发生电场影响,屏蔽电极500能够屏蔽干扰信号。
[0048]
参见图4所示,检测电路100包括振荡单元101、滤波单元102和检测端口103。滤波单元102的第一端与振荡单元101的第一端电连接,滤波单元102 的第二端分别与振荡单元101的第二端和检测端口103电连接。
[0049]
具体地,滤波单元102的第三端和第四端用于与控制器800电连接。检测电路100通过检测端口103输出激励信号,并将激励信号分别加载在感应电极 300和屏蔽电极500上。接地物体靠近感应电极300时,接地物体与感应电极 300形成第一电容。当接地物体与感应电极300的相对位置发生变化时,第一电容的参数也发生变化,进而振荡单元101的振荡频率也会随之变化。检测电路100滤除振荡单元101产生的振荡信号中的杂质信号,并将滤除杂质信号后的振荡信号传送至控制器800中。控制器800通过分析振荡信号的振荡频率,可
以得到接地物体的位置信息,由此电子皮肤实现了对接地物体位置的检测。
[0050]
示例性的,振荡单元101包括第一电感l1和第二电容c2。第一电感l1 的第一端分别与第二电容c2的第一端和滤波单元102的第一端电连接,第一电感l1的第二端分别与第二电容c2的第二端、滤波单元102的第二端和检测端口103电连接。
[0051]
具体地,接地物体与感应电极300形成第一电容,第一电容、第一电感l1 和第二电容c2为并联关系,共同组成一个振荡电路。当接地物体与感应电极 300的相对位置发生变化时,第一电容的参数也发生变化,进而导致振荡电路的振荡频率发生变化。控制器800通过分析振荡频率的变化,可以得到接地物体的位置信息。
[0052]
示例性的,滤波单元102包括第一电阻r1、第二电阻r2、第三电容c3、第四电容c4、第五电容c5和第六电容c6。第一电阻r1的第一端分别与第三电容c3的第一端和振荡单元101的第一端电连接,第一电阻r1的第二端分别与第五电容c5的第一端和控制器800电连接;第二电阻r2的第一端分别与第四电容c4的第一端、振荡单元101的第二端和检测端口103电连接,第二电阻r2的第二端分别与第六电容c6的第一端和控制器800电连接;第三电容 c3的第二端、第四电容c4的第二端、第五电容c5的第二端和第六电容c6的第二端均与金属外壳200电连接。
[0053]
具体地,第一电阻r1和第二电阻r2可以起到限制电流的作用。第三电容 c3、第四电容c4、第五电容c5和第六电容c6起到滤波作用。由于振荡单元 101生成的信号为振荡信号,因此滤波单元102采用对称式的结构,能够实现对振荡信号的过滤。第三电容c3的第二端、第四电容c4的第二端、第五电容 c5的第二端和第六电容c6的第二端均与金属外壳200电连接,实现检测电路 100的信号地与金属外壳200电连接,增强了检测电路100信号地的稳定性,可以避免由于信号地发生基准偏移造成电子皮肤失效的问题。
[0054]
图5示出了本技术另一实施例提供的电子皮肤的电路连接示意图。参见图 5所示,屏蔽电极500的中心轴与感应电极300的中心轴重合,屏蔽电极500 的横截面积大于或等于感应电极300的横截面积。
[0055]
具体地,屏蔽电极500的横截面积大于或等于感应电极300的横截面积,可以确保屏蔽电极500能够将金属外壳200内部的干扰信号全部屏蔽,确保感应电极300检测的精确度。
[0056]
示例性的,第一绝缘层400镶嵌在屏蔽电极500上,屏蔽电极500实现对感应电极300的包裹设置,确保屏蔽电极500能够将干扰信号全部屏蔽,确保感应电极300检测的精确度。
[0057]
本技术的一个实施例中,感应电极300的数量为多个,多个感应电极300 分布设置在第一绝缘层400的外表面上,多个感应电极300均与检测电路100 的检测端口103电连接。
[0058]
具体地,每一个感应电极300能够独立感知第一电容(感应电极300与接地物体形成的电容)变化的信号,并将电容的变化信号传送至检测电路100中。
[0059]
本技术公开了一种机器人,包括上述所述的机械臂。由于机械臂上电子皮肤中的检测电路的信号地与任意的金属外壳电连接,所有的金属外壳串联电连接。检测电路中的信号地与所有的金属外壳电连接,增加了检测电路的信号地的稳定性,可以避免由于信号地发生基准偏移造成电子皮肤失效的问题。
[0060]
以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实
施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。