1.本发明涉及一种存储介质及机器人的示教方法。
背景技术:
2.在专利文献1中,公开了一种进行机器人的示教的信息处理装置。在现有技术中,将机器人的轨迹重叠显示于机器人的图像,此时,以视觉上能够区分的方式来显示机器人的特殊姿势附近的轨迹部分。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-202514号公报。
6.然而,在现有技术中,特殊姿势附近的轨迹部分存在无法容易地识别进行哪种操作能够避免特殊姿势的问题。
技术实现要素:
7.根据本发明的第一方式,提供一种存储介质,存储有使计算机执行如下步骤的程序,当预先决定的条件成立时使处理器执行可视化处理,针对机器人所具有的多个扭转关节在轴线的位置上显示可视化的虚拟线。
8.根据本发明的第二方式,提供一种机器人的示教方法。该示教方法包括可视化工序,当预先决定的条件成立时,针对机器人所具有的多个扭转关节在轴线的位置上显示可视化的虚拟线。
附图说明
9.图1是第一实施方式中的机器人系统的说明图。
10.图2是信息处理装置的功能框图。
11.图3是示出实施方式中的示教处理的步骤的流程图。
12.图4是示出示教处理窗口的一例的说明图。
13.图5是示出改变了可视化轴线的显示方式的情况的例子的说明图。
14.图6是示出改变了可视化轴线的显示方式的情况的其它例子的说明图。
15.图7是示出改变了可视化轴线的显示方式的情况的又一其它的例子的说明图。
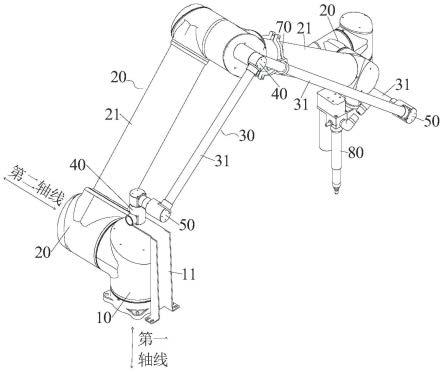
16.图8是第二实施方式中的机器人系统的说明图。
17.符号说明
18.100:机器人;110:基座;120:机械臂;200:控制装置;300:信息处理装置;310:处理器;312:示教处理部;320:存储器;330:接口电路;350:显示部;400:示教器;500:头戴式显示器。
具体实施方式
19.a.第一实施方式
20.图1是示出第一实施方式中的机器人系统的说明图。该机器人系统具备机器人100、控制机器人100的控制装置200和信息处理装置300。信息处理装置300例如为个人计算机。在图1中,描绘出规定出三维空间的正交坐标系的三个轴x、y、z。x轴和y轴为水平方向上的轴,z轴为铅锤方向上的轴。在该例中,xyz坐标系为以预先设定于机器人100的基准点为原点的机器人坐标系。
21.机器人100具备基座110和机械臂120。机械臂120由六个关节依次连接而成。这些关节j1~j6之中,三个关节j1、j4、j6为扭转关节,其它的三个关节j2、j3、j5为弯曲关节。扭转关节是指,能够绕旋转轴的轴线扭转移动的关节。在本实施方式中例示出六轴机器人,但也可以使用具有设置了两个以上的扭转关节的任意的机械臂机构的机器人。另外,本实施方式的机器人100为垂直多关节机器人,但也可以使用水平多关节机器人。
22.一般而言,两个扭转关节的轴线彼此位于同一直线上的姿势成为特殊姿势,这是由于无法通过正交坐标系的坐标利用反向运动学唯一地求得关节角度的原因。在本公开中,考虑到这样的特性进行了研究,以便能够使示教者容易地识别是否接近于特殊姿势以及进行哪种操作能够避免特殊姿势。
23.图2是示出信息处理装置300的功能的框图。信息处理装置300具有处理器310、存储器320、接口电路330、连接于接口电路330的输入设备340和显示部350。在接口电路330上还连接有控制装置200。但是,信息处理装置300也可以不与控制装置200连接。
24.处理器310作为执行机器人100的示教处理的示教处理部312来发挥功能。示教处理部312的功能通过由处理器310执行储存于存储器320的示教处理程序tp来实现。但是,也可以通过硬件电路来实现示教处理部312的功能的一部分或者全部。
25.在存储器320中,除了示教处理程序tp以外,还储存有机器人属性数据rd和机器人控制程序rp。机器人属性数据rd包括机器人100的机械臂的结构、可动范围等各种的机器人特性。机器人控制程序rp由使机器人100动作的多个命令构成。
26.图3是示出一实施方式中的示教处理的步骤的流程图。在步骤s10中,示教者启动示教处理程序tp。在步骤s20中,示教者指定作为示教对象的机器人的机器人类型和作为编辑对象的机器人控制程序的程序名。在步骤s30中,在显示部350中显示所指定的类型的机器人的模拟图像。
27.图4是示出在使用了示教处理程序tp的示教处理时显示于显示部350的示教处理窗口w10的一例的说明图。示教处理窗口w10包括用于选择机器人类型的机器人选择栏rf、用于指定机器人控制程序的程序名的程序选择栏pf、显示机器人100的模拟图像的机器人显示窗口w11和用于输入任务操作的任务操作窗口w12。
28.在机器人显示窗口w11中,显示出包括机器人100的三维图像的模拟图像。另外,在机器人显示窗口w11的下部设置有选择按钮sb1~sb3,用于选择在机器人100的多个扭转关节j1、j4、j6的轴线之中,应重叠显示于机器人显示窗口w11内的机器人100的轴线。为了将接近于特殊姿势的情况通知给示教者,较优选选择显示两个以上的扭转关节的轴线。在图4的例子中,选择两个扭转关节j4、j6的轴线作为显示对象,相应于此,在机器人100的三维图像中,在两个扭转关节j4、j6的轴线的位置上显示出作为可视化的虚拟线的可视化轴线
vj4、vj6。当选择了全部的选择按钮sb1~sb3时,在三个扭转关节j1、j4、j6的轴线的位置上分别显示出可视化轴线。
29.显示两个扭转关节j4、j6的可视化轴线vj4、vj6的可视化处理在预先决定的条件成立时被执行。例如,当预先从以下例示的条件1~4之中选择的一个以上的条件成立时,可以判定为“预先决定的条件”成立。
30.《条件1:从示教者接受到对机器人进行示教的指示》
31.例如当使用机器人选择栏rf选择了机器人的类型时,可以判断为该条件1成立。或者,在对示教处理程序tp初始设定了机器人的类型的情况下,也可以根据示教者对示教处理程序tp的启动判断为条件1成立。
32.《条件2:从示教者接受到显示多个可视化轴线的指示》
33.当示教者设定了图4的选择按钮sb1~sb3时,可以判断为该条件2成立。
34.《条件3:多个扭转关节的多个轴线之中,两个轴线彼此的角度为预先决定的阈值以下》
35.当通过由示教者实现的任务操作来改变机器人100的位置姿势时,根据其位置姿势利用反向运动学计算出关节位移,求得弯曲关节j5的角度,由此来判断该条件3是否成立。条件3的阈值例如被设定为3度~10度的范围的值。
36.《条件4:任务操作在正交坐标系中进行》
37.当在任务操作窗口w12中选择了机器人坐标系或工具坐标系等正交坐标系时,可以判断为该条件4成立。
38.在本实施方式中,仅采用上述条件1作为开始显示可视化轴线的预先决定的条件。具体而言,当使用机器人选择栏rf选择了机器人的类型时,开始显示机器人100的三维图像,并且开始显示可视化轴线vj4、vj6。此外,在采用上述条件3作为开始显示可视化轴线vj4、vj6的预先决定的条件的情况下,在图4的状态下未显示出可视化轴线vj4、vj6,当这些轴线的角度成为阈值以下时开始显示可视化轴线vj4、vj6。
39.任务操作窗口w12包括选择坐标系的坐标系选择栏cf、根据所选择的坐标系指定六个坐标值的坐标值栏vf、指定编辑对象的示教点的示教点栏tf、示教点设定按钮b1和结束按钮b2。在每一个坐标值栏vf的右侧和示教点栏tf的右侧,配置有用于增减值的增减按钮cb。
40.坐标系选择栏cf为用于从机器人坐标系、工具坐标系和关节坐标系之中选择任意的一个坐标系的栏。在图4的例子中,坐标系选择栏cf构成为下拉菜单。机器人坐标系和工具坐标系为正交坐标系。当在正交坐标系中进行任务操作时,通过反向运动学来计算关节坐标值,因此特殊姿势会成为问题。另一方面,在关节坐标系中,不需要通过反向运动学进行的计算,因此特殊姿势不会成为问题。因此,较优选在正交坐标系中进行任务操作时执行可视化轴线vj4、vj6的显示。
41.在图3的步骤s40中,通过示教者选择示教点。示教点的选择通过设定示教点栏tf的值来进行。在步骤s50中,机器人100的姿势响应于任务操作窗口w12中的示教者的任务操作而改变。在步骤s60中,示教处理部312判定成为可视化对象的扭转关节j4、j6的轴线彼此的角度是否为阈值以下。在该角度超过阈值的情况下,进入后述的步骤s80。另一方面,在扭转关节j4、j6的轴线彼此的角度为阈值以下的情况下,进入步骤s70,示教处理部312改变可
视化轴线vj4、vj6的显示方式。
42.图5是示出改变了可视化轴线vj4、vj6的显示方式的情况下的例子的说明图。在该例中,扭转关节j4、j6的轴线彼此的角度θ成为阈值θt以下,伴随于此可视化轴线vj4、vj6的显示方式从图4改变。具体而言,例如,在扭转关节j4、j6的轴线彼此的角度θ为阈值θt以下的情况下,将两个可视化轴线vj4、jv6中的至少一方的颜色改变为与在角度θ超过阈值θt的情况下的颜色不同的颜色。于是,通过改变可视化轴线的颜色,能够向示教者警告接近于特殊姿势的情况。
43.图6是示出在改变了可视化轴线vj4、vj6的显示方式的情况下的其它例子的说明图。在该例中,在机器人显示窗口w11内显示促使示教者进行增大扭转关节j4、j6的轴线彼此的角度的操作的操作指示。具体而言,显示促使向两个可视化轴线vj4、vj6的角度分开的方向进行任务操作的箭头opd和警告语alm作为操作指示。可以仅显示这样的箭头opd和警告语alm中的一方,或者也可以显示其它种类的操作指示作为操作指示。通过显示这种操作指示,能够向示教者通知用于远离特殊姿势的操作。
44.图7是示出在改变了可视化轴线vj4、vj6的显示方式的情况下的其它例子的说明图。在该例中,在两个可视化轴线vj4、vj6的附近显示出表示接近于特殊姿势的情况的危险区域da。具体而言,通过对被两个可视化轴线vj4、vj6所夹着的区域赋予特定的颜色来显示危险区域da。但是,危险区域da只要被设定于两个可视化轴线vj4、vj6的附近即可,也可以向被两个可视化轴线vj4、vj6所夹着的区域的外侧伸出。根据显示危险区域da,能够向示教者通知接近于特殊姿势的危险区域da。
45.上述的图5~图7所示的可视化轴线vj4、vj6的显示方式的改变可以任意地进行组合。
46.在图3的步骤s80中,示教者判断是否需要改变机器人100的姿势。在判断为需要改变姿势的情况下,返回步骤s50,再次执行上述的步骤s50~s70。另一方面,在不需要改变姿势的情况下,进入步骤s90,进行示教点的设定。通过由示教者按下示教点设定按钮b1来执行示教点的设定。所设定的示教点的坐标值被注册于机器人控制程序rp内。
47.在步骤s100中,通过示教者判断示教处理是否完成。如果示教处理没有完成,则返回步骤s40,重复上述的步骤s40~s90。另一方面,如果示教处理完成,则示教者通过按下结束按钮b2来结束图3的处理。
48.如上所述,在上述第一实施方式中,由于针对多个扭转关节j4、j6在轴线的位置上显示作为可视化的虚拟线的可视化轴线vj4、vj6,因此,示教者能够容易地判断是否接近于两个扭转关节v4、v6的轴线彼此在一条直线上排列的特殊姿势。另外,能够容易地识别通过进行操作使两个可视化轴线的角度不为零度,能够避免特殊姿势的情况。
49.b.第二实施方式
50.图8是示出第二实施方式中的机器人系统的说明图。该机器人系统具有省略了图1所示的第一实施方式的机器人系统中的信息处理装置300,而追加了示教器400和透视型的头戴式显示器500而成的结构。机器人100的结构与第一实施方式相同。在机器人100的控制装置200上分别连接有示教器400和头戴式显示器500。此外,头戴式显示器500被穿戴于示教者的头部,但省略了示教者的图示。
51.在第二实施方式中,示教者使用示教器400来执行机器人100的示教处理。示教器
400构成为,在图4所示的示教处理窗口w10之中,除了模拟图像的显示以外,几乎进行所有的处理、指示。由示教器400发挥的示教处理的功能通过示教器400的处理器执行被储存于示教器400内的存储器的计算机程序来实现。
52.在第二实施方式中,通过头戴式显示器500来进行针对扭转关节显示可视化轴线的可视化处理。即,以能够使示教者视觉确认到在作为实物机器的机器人100的多个扭转关节的多个轴线的位置上显示有多个可视化轴线vj4、vj6的状态的方式,执行由头戴式显示器500实现的显示。针对用于开始显示多个可视化轴线vj4、vj6的条件、显示方式,能够适用第一实施方式中所说明的内容。
53.与上述第一实施方式同样地,在第二实施方式中,也针对多个扭转关节j4、j6在轴线的位置上显示作为可视化的虚拟线的可视化轴线vj4、vj6,因此,示教者能够容易地判断是否接近于两个扭转关节j4、j6的轴线彼此在一条直线上排列的特殊姿势。另外,能够容易地识别通过进行操作使两个可视化轴线的角度不为零度,能够避免特殊姿势的情况。
54.c.其它实施方式
55.本公开并不限于上述的实施方式,在不脱离其主旨的范围内能够以各种方式来实现。例如,本公开能够通过以下的方式(aspect)来实现。与以下所记载的各方式中的技术特征相对应的上述实施方式中的技术特征能够适当地进行替换或组合,以便解决本发明的技术问题的一部分或者全部,或者以便实现本发明的效果的一部分或者全部。另外,只要并非作为在本说明书中必须说明的技术特征,则能够适当地对其进行删除。
56.(1)根据本发明的第一方式,提供一种计算机程序。该计算机程序当预先决定的条件成立时使处理器执行可视化处理,针对机器人所具有的多个扭转关节在轴线的位置上显示可视化的虚拟线。
57.根据该计算机程序,由于在多个扭转关节的轴线的位置上显示虚拟线,因此,示教者能够容易地判断是否接近于两个扭转关节的轴线彼此在一条直线上排列的特殊姿势。另外,能够容易地识别通过进行操作使两个虚拟线的角度不为零度,能够避免特殊姿势的情况。
58.(2)在上述计算机程序中,可以对在用于进行所述机器人的示教的模拟图像中所包括的所述机器人的三维图像执行所述可视化处理。
59.根据该计算机程序,在模拟图像中,能够容易识别避免特殊姿势的操作。
60.(3)在上述计算机程序中,所述条件可以包括从示教者接受到的对所述机器人进行示教的指示。
61.根据该计算机程序,能够使多个可视化轴线以响应于示教者的指示的方式进行显示。
62.(4)在上述计算机程序中,所述条件可以包括从示教者接受到的显示所述虚拟线的指示。
63.根据该计算机程序,能够使虚拟线以响应于示教者的指示的方式进行显示。
64.(5)在上述计算机程序中,所述条件可以包括所述多个扭转关节的轴线之中的两个轴线的角度为预决定的阈值以下。
65.根据该计算机程序,当两个轴线的角度成为阈值以下而接近于特殊姿势时,通过显示多个可视化轴线,向示教者警告接近于特殊姿势的情况。
66.(6)在上述计算机程序中,所述可视化处理可以包括在所述多个扭转关节的轴线之中的两个轴线的角度为预先决定的阈值以下的情况下,将与所述两个轴线相对应的两个虚拟线中的至少一方的颜色改变为与在所述角度超过所述阈值的情况下的颜色不同的颜色的处理。
67.根据该计算机程序,当两个轴线的角度成为阈值以下而接近于特殊姿势时,通过改变虚拟线的颜色,向示教者警告接近于特殊姿势的情况。
68.(7)在上述计算机程序中,所述可视化处理可以包括在所述多个扭转关节的轴线之中的两个轴线的角度为预先决定的阈值以下的情况下,显示促使示教者进行使所述两个轴线的角度变大的操作的操作指示的处理。
69.根据该计算机程序,能够向示教者通知用于使姿势远离特殊姿势的操作。
70.(8)在上述计算机程序中,所述可视化处理可以包括在所述多个扭转关节的轴线之中的两个轴线的角度为预先决定的阈值以下的情况下,在与所述两个轴线相对应的两个虚拟线的附近显示表示接近于特殊姿势的危险区域的处理。
71.根据该计算机程序,能够向示教者通知接近于特殊姿势的危险区域。
72.(9)根据本发明的第二方式,提供一种机器人的示教方法。该示教方法包括可视化工序,当预先决定的条件成立时,针对机器人所具有的多个扭转关节在轴线的位置上显示可视化的虚拟线。
73.根据该示教方法,由于在多个扭转关节的轴线的位置上显示虚拟线,因此,示教者能够容易地判断是否接近于两个扭转关节的轴线彼此在一条直线上排列的特殊姿势。另外,能够容易地识别通过进行操作使两个虚拟线的角度不为零度,能够避免特殊姿势的情况。
74.本发明也能够通过除了上述以外的各种方式来实现。例如,能够通过具备机器人和机器人控制装置的机器人系统、用于实现机器人控制装置的功能的计算机程序、记录有该计算机程序的非瞬时性记录介质(non-transitory storage medium)等方式来实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。