1.本发明涉及智能搬运机器人技术领域,尤其是涉及一种具有高稳定性的仓储物流智能搬运机器人。
背景技术:
2.轮式移动机器人是自动执行工作的机器装置,它既可以接受人的遥控,又可以按照预先编排的程序运行,其主要任务是协助或者取代人从事重复、繁重或者危险的工作,应用于货物运输的轮式移动机器人被称为智能搬运机器人,智能搬运机器人是通过导航系统自动将货物运输至指定地点,现有的应用于仓储物流的智能搬运机器人通常较少配备相应的减震部件,在仓库路面较为不平整的地方机器人容易受到震动,机器人上方放置的货品容易在震动中掉落,造成麻烦。
技术实现要素:
3.本发明的目的是针对上述存在的问题和不足,提供一种具有高稳定性的仓储物流智能搬运机器人,有效减缓机器人受到的震动,避免货品掉落。
4.为达到上述目的,所采取的技术方案是:
5.一种具有高稳定性的仓储物流智能搬运机器人,包括安装板和底座,所述安装板位于底座上方;
6.所述底座上表面中心开有凹槽五,所述安装板下端活动嵌入凹槽五内部,所述安装板上方从上至下依次设有与其平行的顶板和隔板,所述安装板上表面前后端左右两侧均开有凹槽二,所述凹槽二内转动连接有丝杆,所述丝杆外侧铰接有螺纹块,所述安装板内部前后侧均嵌入安装有两个电机,所述电机位于凹槽二内部,所述电机动力输出端转动连接有电机轴,所述电机轴外端与丝杆靠内的一端固定连接,所述隔板前后侧左右两端均设有伸缩架,所述伸缩架上端左右两侧均与隔板铰接,所述伸缩架下端靠内的一侧与螺纹块上端铰接,所述伸缩架下端靠外的一侧与安装板上端铰接,所述顶板下方前后侧左右两端均铰接有两根连杆,每两根所述连杆下端分别与伸缩架上端左右两侧铰接;
7.所述凹槽五内部中部设有连接板,所述连接板上方左右两侧均铰接有铰接杆一,所述安装板下方左右两侧均固定连接有连接杆,所述连接杆下端与铰接杆一上端铰接,所述安装板下方中心固定连接有连接柱二,所述连接柱二下端贯穿出连接板,所述连接柱二下表面开有凹槽四,所述凹槽五内壁底面中心固定连接有插杆二,所述插杆二上端嵌入凹槽四内部,所述凹槽四内壁顶面与插杆二之间固定连接有弹簧四。
8.优选的,所述底座下方四角转动连接有轮子。
9.优选的,所述安装板左右两侧与凹槽五内壁之间均固定连接有弹簧三。
10.优选的,所述安装板下方前后两侧中部均铰接有铰接杆二,所述连接板上表面前后两侧均开有凹槽三,所述铰接杆二下端与凹槽三滑动连接,所述铰接杆二位于连接柱二外侧。
11.优选的,所述连接板与凹槽五槽底之间左右两侧均固定连接有弹簧二,所述弹簧二位于连接柱二外侧。
12.优选的,所述安装板上方四角均固定连接有连接柱一,所述连接柱一位于凹槽二和隔板外侧,所述连接柱一上表面开有凹槽一,所述顶板下方四角均固定连接有插杆一,所述插杆一下端活动嵌入凹槽一内部,所述插杆一与凹槽一槽底之间固定连接有弹簧一。
13.采用上述技术方案,所取得的有益效果是:
14.由于安装板位于底座上方,安装板下端嵌入底座上表面开有的凹槽五内,安装板上方设有隔板和顶板,所以使用者便可以将货品放在安装板和隔板上方,由于安装板下方中心固定连接有连接柱二,连接柱二下表面开有凹槽四,凹槽五槽底中心固定连接有插杆二,插杆二上端嵌入凹槽四内部并与凹槽四槽底之间固定连接有弹簧四,所以在机器人移动受到上下方向的震动时,弹簧四便可以进行伸缩,减缓震动,由于凹槽内部中部设有连接板,连接板左右两端通过铰接杆一和连接杆与安装板下方连接,连接板二下方通过弹簧二与凹槽五槽底固定连接,所以在机器人受到上下方向的震动时弹簧二和铰接杆一便可以进一步减缓机器人受到的震动,由于安装板左右两侧均通过弹簧三与凹槽五内壁固定连接,所以在机器人受到左右方向的震动时,弹簧三便可以随着震动进行伸缩,缓解安装板受到的左右方向的震动,进一步增强了机器人的稳定性,有效避免了货品掉落的情况。
附图说明
15.为了更清楚地说明本发明实施例的技术方案,下文中将对本发明实施例的附图进行简单介绍。其中,附图仅仅用于展示本发明的一些实施例,而非将本发明的全部实施例限制于此。
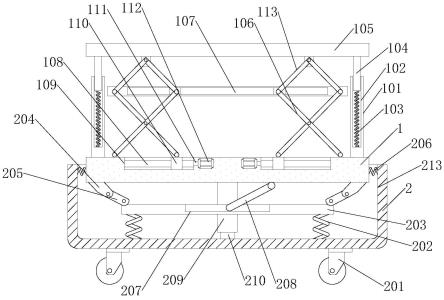
16.图1为本发明的整体主视剖面结构示意图;
17.图2为本发明的连接板俯视平面结构示意图;
18.图3为本发明的安装板俯视平面结构示意图;
19.图4为本发明的连接柱二和插杆二主视剖面结构示意图。
20.图中标记:安装板1、连接柱一101、凹槽一102、弹簧一103、插杆一104、顶板105、伸缩架106、隔板107、丝杆108、凹槽二109、螺纹块110、电机轴111、电机112、连杆113、底座2、轮子201、弹簧二202、连接板203、连接杆204、铰接杆一205、弹簧三206、凹槽三207、铰接杆二208、连接柱二209、插杆二210、凹槽四211、弹簧四212、凹槽五213。
具体实施方式
21.为了使得本发明的技术方案的目的、技术特征和技术效果更加清楚,下文中将结合本发明具体实施例的附图,对本发明实施例的示例方案进行清楚、完整地描述。
22.参见图1至图4,本技术是一种具有高稳定性的仓储物流智能搬运机器人,包括安装板1和底座2,所述安装板1位于底座2上方;
23.所述底座2上表面中心开有凹槽五213,所述安装板1下端活动嵌入凹槽五213内部,所述安装板1上方从上至下依次设有与其平行的顶板105和隔板107,所述安装板1上表面前后端左右两侧均开有凹槽二109,所述凹槽二109内转动连接有丝杆108,所述丝杆108外侧铰接有螺纹块110,所述安装板1内部前后侧均嵌入安装有两个电机112,所述电机112
位于凹槽二109内部,所述电机112动力输出端转动连接有电机轴111,所述电机轴111外端与丝杆108靠内的一端固定连接,所述隔板107前后侧左右两端均设有伸缩架106,所述伸缩架106上端左右两侧均与隔板107铰接,所述伸缩架106下端靠内的一侧与螺纹块110上端铰接,所述伸缩架106下端靠外的一侧与安装板1上端铰接,所述顶板105下方前后侧左右两端均铰接有两根连杆113,每两根所述连杆113下端分别与伸缩架106上端左右两侧铰接;
24.具体的,由于安装板1上方从上至下依次设有与其平行的顶板105和隔板107,隔板107前后侧左右两端均设有伸缩架106,伸缩架106上端左右两侧均与隔板107铰接,伸缩架106下端靠内的一侧与螺纹块110上端铰接,伸缩架106下端靠外的一侧与安装板1上端铰接,螺纹块110螺纹连接于丝杆108外侧,丝杆108靠内的一端通过电机轴111与电机112动力输出端固定连接,给电机112通电,电机112便可以通过电机轴111带动丝杆108转动,从而带动伸缩架106下端靠内的一侧向内或向外移动,使伸缩架106拉伸或收缩,从而带动隔板107向上或向下移动,调节隔板107高度较为方便,由于顶板105下方前后侧左右两端均铰接有两根连杆113,每两根连杆113下端分别与伸缩架106上端左右两侧铰接,所以在伸缩架106拉伸或收缩的同时左右两根连杆113也随着收缩或拉伸,同时带动顶板105上下运动,使用者便可以向安装板1和隔板107上放上货品,调节隔板107和顶板105的高度便可以放下不同高度的货物,较为方便;
25.所述凹槽五213内部中部设有连接板203,所述连接板203上方左右两侧均铰接有铰接杆一205,所述安装板1下方左右两侧均固定连接有连接杆204,所述连接杆204下端与铰接杆一205上端铰接,所述安装板1下方中心固定连接有连接柱二209,所述连接柱二209下端贯穿出连接板203,所述连接柱二209下表面开有凹槽四211,所述凹槽五213内壁底面中心固定连接有插杆二210,所述插杆二210上端嵌入凹槽四211内部,所述凹槽四211内壁顶面与插杆二210之间固定连接有弹簧四212;
26.所述底座2下方四角转动连接有轮子201,所述安装板1下方前后两侧中部均铰接有铰接杆二208,所述连接板203上表面前后两侧均开有凹槽三207,所述铰接杆二208下端与凹槽三207滑动连接,所述铰接杆二208位于连接柱二209外侧,所述连接板203与凹槽五213槽底之间左右两侧均固定连接有弹簧二202,所述弹簧二202位于连接柱二209外侧;
27.进一步的,由于凹槽五213内部中部设有连接板203,安装板1下方中心固定连接有连接柱二209,连接柱二209下端贯穿出连接板203,连接柱二209下表面开有凹槽四211,凹槽五213内壁底面中心固定连接有插杆二210,插杆二210上端嵌入凹槽四211内部,凹槽四211内壁顶面与插杆二210之间固定连接有弹簧四212,所以在机器人移动时受到上下方向的震动时,弹簧四212便可以进行伸缩,减缓机器人上下方向的震动,由于连接板203与凹槽五213槽底之间左右两侧均固定连接有弹簧二202,连接板203上方左右两侧均通过铰接杆一205和连接杆204与安装板1连接,所以在机器人受到上下方向的震动时弹簧二202便可以随着伸缩,铰接杆一205也可以随着转动,减缓震动,由于安装板1下方前后两侧均铰接有铰接杆二208,连接板203上方前后两侧均设有凹槽三207,铰接杆二208下端与凹槽三207滑动连接,所以铰接杆二208便可以在凹槽三207内左右滑动,进一步减缓机器人受到的上下方向的震动,有效的增强了机器人的稳定性,有效避免了货品掉落的情况;
28.所述安装板1左右两侧与凹槽五213内壁之间均固定连接有弹簧三206,所述安装板1上方四角均固定连接有连接柱一101,所述连接柱一101位于凹槽二109和隔板107外侧,
所述连接柱一101上表面开有凹槽一102,所述顶板105下方四角均固定连接有插杆一104,所述插杆一104下端活动嵌入凹槽一102内部,所述插杆一104与凹槽一102槽底之间固定连接有弹簧一103;
29.进一步的,由于安装板1左右两侧与凹槽五213内壁之间均固定连接有弹簧三206,所以在机器人移动时受到左右方向的震动时,安装板1左右两侧的弹簧三206便可以随着震动拉伸或收缩,有效的减缓了机器人受到的左右方向的震动,进一步增强了机器人的稳定性,由于安装板1上方四角均固定连接有连接柱一101,连接柱一101上表面开有凹槽一102,顶板105下方四角均固定连接有插杆一104,插杆一104下端活动嵌入凹槽一102内部,插杆一104与凹槽一102槽底之间固定连接有弹簧一103,所以在安装板1受到上下方向的震动时,弹簧一103便可以随着震动伸缩,增加顶板105的稳定性,避免顶板105震动影响隔板107的稳定,进一步增加了机器人的稳定性。
30.本说明书中每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同或相似部分互相参见即可。
31.上文中参照优选的实施例详细描述了本发明的示范性实施方式,然而本领域技术人员可理解的是,在不背离本发明理念的前提下,可以对上述具体实施例做出多种变型和改型,且可以对本发明提出的各技术特征、结构进行多种组合,而不超出本发明的保护范围,本发明的保护范围由所附的权利要求确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
