技术特征:
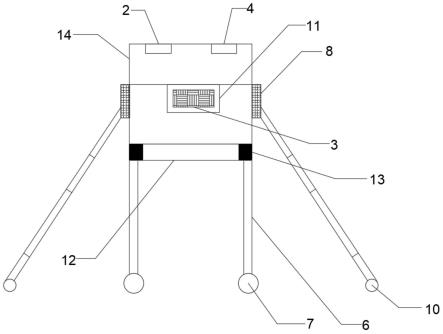
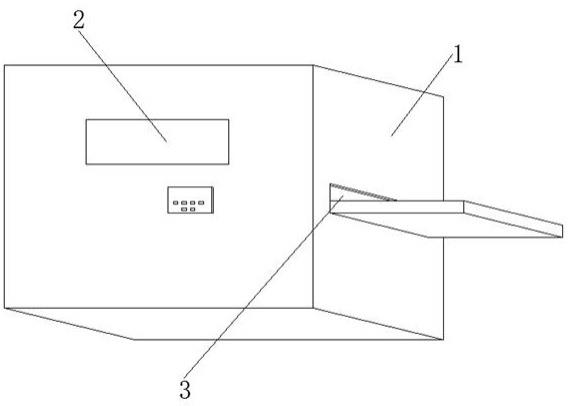
1.一种室内移动机器人的多传感器控制系统,包括移动机器人,其特征在于,所述系统包括主控单片机、移动机构和警示模块,所述主控单片机设有路径规划模块,所述路径规划模块用于规划移动机器人的移动路径,所述移动机构包括底盘、前驱动轴、后驱动轴、前轮、后轮、第一滑槽和第二滑槽,所述前驱动轴和后驱动轴分别平行设置在底盘上,所述前轮分别设置在前驱动轴的两端,所述后轮分别设置在后驱动轴的两端,所述第一滑槽凹陷设置在底盘的下表面上并且用于放置前驱动轴,所述第二滑槽凹陷设置在底盘的下表面上并且用于放置后驱动轴,所述警示模块包括与主控单片机电连接的声光提示器,所述声光提示器设置在移动机器人上。2.根据权利要求1所述的一种室内移动机器人的多传感器控制系统,其特征在于,包括驱动机构,所述驱动机构包括容纳槽以及与主控单片机电连接的驱动组件,所述容纳槽设置在凹陷设置在底盘的上表面,所述驱动组件设置在容纳槽内并且用于驱动前驱动轴沿着第一滑槽滑动和确定后驱动轴沿着第二滑槽滑动。3.根据权利要求2所述的一种室内移动机器人的多传感器控制系统,其特征在于,包括分别设置在移动机器人上并且分别与主控单片机电连接的红外摄像头和图像处理器,所述红外摄像头用于获取底盘前方障碍物的图像信息并且传输到图像处理器,所述图像处理器用于分析出障碍物的高度信息和宽度信息。4.根据权利要求3所述的一种室内移动机器人的多传感器控制系统,其特征在于,包括升降机构,所述升降机构包括分别与主控单片机电连接的升降电机和电动驱动轮,所述升降电机的固定端与电动驱动轮相连接,所述升降电机的移动端与底盘相连接。5.根据权利要求1所述的一种室内移动机器人的多传感器控制系统,其特征在于,包括稳定机构,所述稳定机构包括滑动轮以及与主控单片机电连接的电动伸缩杆,所述电动伸缩杆的固定端分别设置在移动机器人的两侧,所述电动伸缩杆的移动端分别与滑动轮相连接。6.根据权利要求5所述的一种室内移动机器人的多传感器控制系统,其特征在于,所述电动伸缩杆分别倾斜设置在移动机器人上。7.根据权利要求3所述的一种室内移动机器人的多传感器控制系统,其特征在于,包括记忆存储模块,所述记忆存储模块依据图像处理器和路径规划模块识别到的障碍物信息进行提前识别。8.根据权利要求1所述的一种室内移动机器人的多传感器控制系统,其特征在于,包括减震机构,所述减震机构包括减震腔体、减震器、减震润滑油瓶以及与主控单片机电连接的电动喷头,所述减震腔体分别包裹住前轮和后轮,所述减震器分别设置在前轮和后轮上,减震润滑油瓶设置在减震腔体的侧壁上,所述电动喷头设置在减震润滑油瓶上并且对准减震器。
技术总结
本发明提供一种室内移动机器人的多传感器控制系统,包括移动机器人,系统包括主控单片机、移动机构和警示模块,主控单片机设有路径规划模块,路径规划模块用于规划移动机器人的移动路径,移动机构包括底盘、前驱动轴、后驱动轴、前轮、后轮、第一滑槽和第二滑槽,前驱动轴和后驱动轴分别平行设置在底盘上,前轮分别设置在前驱动轴的两端,后轮分别设置在后驱动轴的两端,第一滑槽凹陷设置在底盘的下表面上并且用于放置前驱动轴,第二滑槽凹陷设置在底盘的下表面上并且用于放置后驱动轴,警示模块包括与主控单片机电连接的声光提示器,声光提示器设置在移动机器人上。本系统中的移动机器人可以有效规避障碍物,提高移动机器人的移动效率。效率。效率。
技术研发人员:樊刘冰
受保护的技术使用者:上海甄徽网络科技发展有限公司
技术研发日:2022.04.07
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。