1.本发明属于外骨骼系统的检测技术领域,尤其是涉及一种外骨骼末端倾向力检测装置、检测方法及制作方法。
背景技术:
2.外骨骼机器人作为一款人机协作一体化机器人,为人体提供助力,增强人体机能,强化肢体力量,大幅度提高穿戴者的负重能力,拓宽穿戴者的工作范围。近年来上肢外骨骼在医疗康复和物资搬运领域蓬勃发展,上肢搬运外骨骼的末端倾向力检测技术是指在使用外骨骼搬运货物的过程中,在尽可能地减轻系统对外骨骼的负担的前提下,通过采集外骨骼末端形变信息来计算出人体对外骨骼所施加倾向力的大小和方向,通过这一技术可以快速、精确地感知人体移动关节手臂的运动倾向,并将信号传输给控制器驱动电机对此进行补偿从而实现外骨骼辅助人体搬运货物的目的。同时末端倾向力检测系统还可以广泛应用于康复上肢外骨骼、机器人触觉、虚拟现实等领域。但是,传统上肢外骨骼的控制方式大多采用肌肉电信号或者压力应变,一般使用手环或者臂环形式固定的传感器阵列采集人体运动倾向信息,这就造成传感器数量多,成本高昂,且由于传感器绑缚结构复杂,松紧程度难以准确调节,过松会导致外骨骼与人体间会有相对位移导致测量误差,过紧会导致肢体血液不流通有害使用者的身体健康,最终都会导致控制效果不好。
3.公告号为cn 111203917 a的发明专利公开了一种基于辅助传感器的外骨骼负载检测装置,包括人体以及人体上穿戴设置的外骨骼本体,所述外骨骼本体通过其肩部绑带固定连接有第一软带,所述第一软带的自由端固定连接有外部负载检测装置,所述外部负载检测装置通过其内部设置的数字式侦测传感器和模拟式侦测传感器固定连接有刚性件,所述刚性件的底部固定连接有第二软带,所述第二软带的自由端固定连接有刚性挂钩。该方法利用软带固定将外部负载检测装置加载到了外骨骼本体上,这不仅会加重外骨骼的负担,同样存在上述的问题。本发明因此而来。
技术实现要素:
4.本发明的目的
5.为了解决上肢外骨骼人机交互系统结构复杂、使用困难、稳定性弱的问题,提出了一种外骨骼末端倾向力检测装置、检测方法及制作方法,通过检测外骨骼末端敏感元件的各方位形变情况,经过融合算法解析出人体在三维空间中的运动倾向,直接避免了因为传感器绑缚机构和人体之间的接触松紧程度或者相对位移导致的误差。通过将传感器阵列集中于外骨骼末端进行检测,肢体与外骨骼只在手腕处有接触,提高了控制精度,简化了控制过程,弥补了绑缚形式传感器阵列的不稳定性,增加了人机耦合能力和抗干扰能力。
6.本发明所采用的技术方案
7.一种外骨骼末端倾向力检测装置,所述检测装置设置于外骨骼末端,所述检测装置包括受力端子和传感器阵列,所述受力端子包括受力触点和与受力触点连接的支撑柱,
所述传感器阵列包括异形弹簧钢板,所述异形弹簧钢板包括支撑板和与支撑板连接的至少一个弹性梁,所述弹性梁上设置有测量传感器,所述受力触点、支撑柱和异形弹簧钢板自上而下设置并固定。
8.优选的技术方案中,所述异形弹簧钢板的内部为镂空结构,所述异形弹簧钢板的中部设置有固定环,所述固定环通过弹性梁连接于支撑板。
9.优选的技术方案中,所述异形弹簧钢板采用1毫米厚的锰钢制成。
10.优选的技术方案中,所述异形弹簧钢板的上、下表面分别设置有上传感器阵列夹板和下传感器阵列夹板,所述上传感器阵列夹板的表面设置有上保护壳体,所述下传感器阵列夹板的背面设置有下保护壳体。
11.优选的技术方案中,所述弹性梁为3个,所述传感器阵列与信号处理板通过排线连接,所述信号处理板采集各测量传感器的耦合电压变化,处理后将解析得到的人体倾向力结果通过串口发送给外骨骼控制主板或者终端。
12.优选的技术方案中,所述处理得到人体倾向力的方法包括:
13.获得的实时测量传感器信息,得到异形弹簧钢板三处检测点受到的力f1、f2、f3;
14.按照下面的公式计算得到倾向力的大小和方向:
[0015][0016][0017][0018]
其中,α是倾向力在传感器水平基准面相对初始方向的偏移夹角,β是倾向力在传感器垂直基准面相对初始方向的偏移夹角,f是倾向力的大小,k
hor
是倾向力水平传导系数,k
ver
是倾向力垂直传导系数。
[0019]
优选的技术方案中,所述信号处理板包括电压跟随器、惠普斯通电桥、芯片最小系统、串口通信电路和通信模式选择电路。
[0020]
优选的技术方案中,所述上传感器阵列夹板、下传感器阵列夹板和所述异形弹簧钢板均设置有走线槽。
[0021]
本发明还公开了一种外骨骼末端倾向力检测方法,包括如下步骤:
[0022]
s01:将倾向力检测装置安装在外骨骼末端的卡槽内;
[0023]
s02:将外骨骼的操作杆连接于倾向力检测装置的受力端子上;
[0024]
s03:实时获取测量传感器的电压信号,测量异形弹簧钢板形变程度;
[0025]
s04:根据异形弹簧钢板各点形变程度逆推出倾向力的大小和方向,其关系按照以下公式:
[0026][0027]
[0028][0029]
其中,α是倾向力在传感器水平基准面相对初始方向的偏移夹角,β是倾向力在传感器垂直基准面相对初始方向的偏移夹角,f是倾向力的大小,f1、f2、f3分别是弹簧钢板三处检测点受到的力,k
hor
是倾向力水平传导系数,k
ver
是倾向力垂直传导系数;
[0030]
s05:选择合适的通信模式,将计算结果发送给外骨骼控制主板或者终端。本发明又公开了一种外骨骼末端倾向力检测装置的制作方法,包括以下步骤:
[0031]
s11:使用聚乳酸塑料通过3d打印技术制作出上、下保护壳体和上、下传感器阵列夹板;
[0032]
s12:通过激光切割技术制作出异形弹簧钢板;
[0033]
s13:通过有限元分析异形弹簧钢板在受到垂直压力时的最大形变位置;
[0034]
s14:在异形弹簧钢板在受到垂直压力时的最大形变位置上粘贴测量传感器;
[0035]
s15:通过聚全氟乙丙烯薄膜按压粘贴处一定时间,在粘贴处上方放置高温硫化硅胶并夹紧;
[0036]
s16:在阴凉背光处静置后剥离聚全氟乙丙烯薄膜;
[0037]
s17:将导线焊接至测量传感器的焊盘上,组装完成。
[0038]
本发明的有益效果
[0039]
1、本发明通过检测外骨骼末端敏感元件的各方位形变情况,经过融合算法解析出人体在三维空间中的运动倾向,直接避免了因为传感器绑缚机构和人体之间的接触松紧程度或者相对位移导致的误差。通过将传感器阵列集中于外骨骼末端进行检测,肢体与外骨骼只在手腕处有接触,提高了控制精度,简化了控制过程,弥补了绑缚形式传感器阵列的不稳定性,增加了人机耦合能力和抗干扰能力。
[0040]
2、可以实现对倾向力三维信息的精确测量,它能够在不牺牲外骨骼本身负载性能的基础上,对人体关节运动倾向进行感知及处理,最终将处理过后的信号传输给控制器,对机器人人机交互领域具有一定的应用价值。
[0041]
3、控制器通过串口与外骨骼控制板或者pc进行数据交互,加快调试效率。外壳和夹板均采用3d打印工艺,减轻了传感器体积和重量。
[0042]
4、本发明的外骨骼末端倾向力测量算法,通过异形弹簧钢板三处形变信息计算出人体倾向力结果,提高了测量精度,缩短了计算时间,大大减少传感器使用数量,降低了成本。可以达到快速识别跟踪人体运动倾向的目的。
附图说明
[0043]
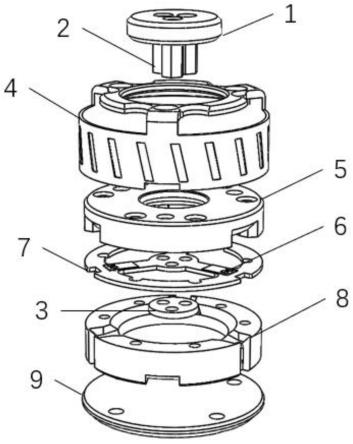
图1为本发明外骨骼末端倾向力检测装置的结构示意图;
[0044]
图2为本发明异形弹簧钢板有限元分析图;
[0045]
图3为本发明外骨骼末端倾向力检测装置在上肢外骨骼上应用的示意图;
[0046]
图4为本发明外骨骼末端倾向力检测装置的检测原理框图
[0047]
图5为本发明外骨骼末端倾向力检测装置的单点性能示意图。
[0048]
其中:受力触点1;支撑柱2;垫片3;上保护壳4;上传感器阵列夹板5;测量传感器6;异形弹簧钢板7;下传感器阵列夹板8;下保护壳9;手柄10;上肢外骨骼末端11;挂钩12;检测
装置13;支撑板71;弹性梁72;固定环73;过孔74。
具体实施方式
[0049]
下面结合本发明实例中的附图,对本发明实例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域技术人员在没有做创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护范围。
[0050]
下面将结合附图对本发明实例作进一步地详细描述。
[0051]
实施例1
[0052]
本发明为了解决因为传感器绑缚机构和人体之间的接触松紧程度或者相对位移导致的误差,设计的倾向力检测装置和检测方法通过传感器阵列实时检测人体上肢末端释放出的控制信号,通过采集弹簧钢板弹性梁的形变信息传递给信号处理板后,经过滤波和耦合通过串口发送给上位机或者外骨骼控制板。
[0053]
如图1-3所示,一种外骨骼末端倾向力检测装置,其为刚性应变式三维压力检测模块,检测装置13设置于外骨骼末端11,检测装置13包括受力端子和传感器阵列,受力端子包括受力触点1和与受力触点1连接的支撑柱2,传感器阵列包括异形弹簧钢板7,异形弹簧钢板7包括支撑板71和与支撑板71连接的至少一个弹性梁72,弹性梁72上设置有测量传感器6,受力触点1、支撑柱2和异形弹簧钢板7自上而下设置并固定。
[0054]
一较佳的实施例,异形弹簧钢板7的内部为镂空结构,异形弹簧钢板7的中部设置有固定环73,固定环73通过弹性梁72连接于支撑板71。
[0055]
具体的,异形弹簧钢板7采用1毫米厚的65号锰钢(65mn)制成。通过激光切割工艺制作而成。
[0056]
测量传感器6单元采用弯曲应变片(bf350-3aa)。为了实现最高的传导效率,如图2所示,经过有限元静应力仿真可知,通过在中心施加大小为100n垂直向下的压力时,支撑板71与弹性梁72的连接处承受了210mpa的应力,形变程度最大,因此测量传感器6黏贴于此处。
[0057]
一较佳的实施例,异形弹簧钢板7的上、下表面分别设置有上传感器阵列夹板5和下传感器阵列夹板8,上传感器阵列夹板5的表面设置有上保护壳体4,下传感器阵列夹板8的背面设置有下保护壳体9。
[0058]
具体的,上保护壳体4设置于上传感器阵列夹板5表面,带有上保护壳体4的上传感器阵列夹板5设置于异形弹簧钢板7表面;下保护壳体9设置于下传感器阵列夹板8背面,带有下保护壳体9的下传感器阵列夹板8设置于异形弹簧钢板7背面;测量传感器6设置于异形弹簧钢板7正面;支撑柱2设置于受力触点1的背面;带有受力触点1的支撑柱2设置于异形弹簧钢板7正面中心;垫片2设置于异形弹簧钢板7背面。受力触点1、支撑柱2、异形弹簧钢板7、垫片3自上而下设置,之间用m3细牙螺丝固定。上保护壳体4、上传感器阵列夹板5、测量传感器6、异形弹簧钢板7、下传感器阵列夹板8、下保护壳体9自上而下设置,之间用m3细牙螺丝固定。
[0059]
固定环73设置有过孔74,过孔74用于穿过支撑柱2。
[0060]
当然也可以采用其他的固定方式,例如黏贴,这样就不需要在固定环73上设置过
孔74。
[0061]
具体的实施案例中,受力触点1、上保护壳4、下保护壳9、上传感器阵列夹板5、下传感器阵列夹板8的材料采用聚乳酸塑料(pla),支撑柱2的材料采用黄铜(h59),上传感器阵列夹板5、下传感器阵列夹板8和异形弹簧钢板7均有走线槽容纳测量传感器6的导线。
[0062]
一较佳的实施例中,弹性梁为3个,即设置三个测量传感器,异形弹簧钢板7通过激光切割成120度均匀镂空结构,传感器阵列与信号处理板通过排线连接,信号处理板采集各测量传感器的耦合电压变化,处理后将解析得到的人体倾向力结果通过串口发送给外骨骼控制主板或者终端,例如pc上位机或者手机等其他终端。
[0063]
具体的,信号处理板可以包括电压跟随器、惠普斯通电桥、芯片最小系统、串口通信电路和通信模式选择电路。
[0064]
信号处理板的主控芯片采用stm32f103c8t6,信号处理板的通信芯片采用ch340c,信号处理板的电源芯片采用ams1117-3.3,信号处理板的运放芯片采用tp09-sr。各部分安装完毕后构成新型的倾向力检测模组,并将其应用在上肢外骨骼末端控制上。
[0065]
如图3所示,应用在上肢外骨骼末端11上的示意图,是以针对性解决现有的绑缚式传感器阵列容错率方面的不足,更好的辅助人体控制外骨骼运动达到助力效果。人体仅在手柄10处与外骨骼有接触,检测装置13设置于手柄10与上肢外骨骼末端11之间,外骨骼还设置挂钩12,挂钩12作为接触媒介将货物重量传递给外骨骼。
[0066]
如图5所示,为本发明一实施例中,倾向力检测装置应用在上肢外骨骼末端11时的倾向力检测性能示意图,由此可以佐证该倾向力检测模组受力范围广,且灵敏度高,线性度好。
[0067]
倾向力检测装置通过获得的实时应变传感器信息,判断人体是否有控制外骨骼运动的倾向;三个测量传感器通过三角形规则排布,每一个作用在受力端子上的倾向力经过受力分析由不同方向的垂直力和水平力共同描述,而垂直力和水平力都会对异形弹簧钢板有一个近似垂直向上或者向下的力,此时可以根据弹簧钢板各点形变程度逆推出倾向力的大小和方向。通过同时采集异形弹簧钢板三处形变数据耦合得到倾向力的大小和方向解决了因传感器绑缚机构和人体之间的相对位移导致的误差,同时由于其极轻的重量不影响外骨骼原有的负载性能。
[0068]
如图4所示,人体仅在手柄10处与外骨骼存在接触,当手柄受力时,与之直接连接的传感器阵列的三个弹性梁会发生形变,弯曲应变片(bf350-3aa)将形变量转换为电压值发送给信号处理板,通过运放电路放大信号后进行滤波处理,根据弹簧钢板各点形变程度逆推出倾向力的大小和方向,其关系按照以下公式:
[0069][0070][0071][0072]
其中,α是倾向力在传感器水平基准面相对初始方向的偏移夹角,β是倾向力在传感器垂直基准面相对初始方向的偏移夹角,f是倾向力的大小,f1、f2、f3分别是弹簧钢板三
处检测点受到的力,k
hor
是倾向力水平传导系数,k
ver
是倾向力垂直传导系数。通过拨码开关(km-2p)选择合适的通信模式,将计算得到的三维力信息发送给外骨骼控制主板或者pc上位机。
[0073]
另一实施例中,本发明又公开了一种外骨骼末端倾向力检测装置的制作方法,包括以下步骤:
[0074]
s11:使用聚乳酸塑料通过3d打印技术制作出上、下保护壳和上、下传感器阵列夹板;
[0075]
s12:通过激光切割技术制作出异形弹簧钢板;
[0076]
s13:通过有限元分析异形弹簧钢板在受到垂直压力时的最大形变位置;
[0077]
s14:在异形弹簧钢板在受到垂直压力时的最大形变位置上粘贴测量传感器;
[0078]
s15:通过聚全氟乙丙烯薄膜按压粘贴处一定时间,在粘贴处上方放置高温硫化硅胶并夹紧;
[0079]
s16:在阴凉背光处静置后剥离聚全氟乙丙烯薄膜;
[0080]
s17:将导线焊接至测量传感器的焊盘上,组装完成。
[0081]
粘贴测量传感器的具体方法如下:
[0082]
在黏贴处涂抹酒精(c2h6o)清洗表面,待酒精(c2h6o)挥发完毕涂抹粘合剂(cc-33a),将弯曲应变片(bf350-3aa)通过粘合剂(cc-33a)贴合在异形弹簧钢板7的最大形变处,用拇指通过聚全氟乙丙烯薄膜(fep)按压弯曲应变片(bf350-3aa)粘贴处,10分钟后拇指松开,在黏贴处上方放置一块高温硫化硅胶(htv)并使用夹子将其夹紧,在阴凉背光处静置1小时后取下夹子,剥离聚全氟乙丙烯薄膜(fep),最后将导线焊接至弯曲应变片(bf350-3aa)的焊盘上。
[0083]
又一实施例中,本发明还公开了一种外骨骼末端倾向力检测方法,包括如下步骤:
[0084]
s01:将倾向力检测装置安装在外骨骼末端的卡槽内;
[0085]
s02:将外骨骼的操作杆连接于倾向力检测装置的受力端子上;
[0086]
s03:实时获取测量传感器的电压信号,测量异形弹簧钢板形变程度;
[0087]
s04:根据异形弹簧钢板各点形变程度逆推出倾向力的大小和方向,其关系按照以下公式:
[0088][0089][0090][0091]
其中,α是倾向力在传感器水平基准面相对初始方向的偏移夹角,β是倾向力在传感器垂直基准面相对初始方向的偏移夹角,f是倾向力的大小,f1、f2、f3分别是弹簧钢板三处检测点受到的力,k
hor
是倾向力水平传导系数,k
ver
是倾向力垂直传导系数;
[0092]
s05:选择合适的通信模式,将计算结果发送给外骨骼控制主板或者终端。
[0093]
本实施例中,倾向力检测装置通过直接测量外骨骼使用者的手部控制意图,避免
了因为传感器绑缚机构和人体之间的接触松紧程度或者相对位移导致的误差,增大了操作容错率。该装置仅使用三个应变片构成传感器阵列,结构材料采用聚合塑料以及弹簧钢,弥补了传统工业三维力传感器质量大,成本高的缺点,使上肢外骨骼在进行末端三维力检测的同时不会牺牲其原有性能。
[0094]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
