1.本实用新型涉及锁具加工设备技术领域,特别涉及一种模具自动压铸机械手臂。
背景技术:
2.压铸机就是用于压力铸造的机器,包括热压室及冷压室两种,后都又分为直式和卧式两种类型。压铸机在压力作用下把熔融金属液压射到模具中冷却成型,开模后可以得到固体金属铸件,最初用于压铸铅字。
3.现有的压铸机一般不配备用于抓去压铸完毕后的产品的取料机械手,通常都是靠人工取件,虽然有一部分压铸机配备有机械手,但是机械手的结构太过复杂,体型较大,相对而言成本过高。
技术实现要素:
4.本实用新型的目的是提供一种结构简单、设备体型小的一种模具自动压铸机械手臂。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种模具自动压铸机械手臂,包括机架,所述机架上转动设有底座,所述底座上通过一号转轴转动设置有导轨,所述导轨转动形成的旋转面与底座转动形成的旋转面两者之间相互垂直,所述导轨上滑动设置有夹持臂,所述导轨上设有与夹持臂螺纹连接的且转动设置于导轨上的螺杆,所述夹持臂末端连接有夹持爪,所述导轨上设有随导轨转动的弧形传动轨,所述弧形传动轨的圆心与一号转轴的圆心同心设置,所述弧形传动轨的内周壁设有第一传动齿,所述第一传动齿沿着弧形传动轨的内周壁环绕排列设置,所述底座上转动设有与第一传动齿啮合用于带动弧形传动轨转动的齿轮,所述机架上设有驱动底座转动的一号驱动件,所述底座上设有用于驱动齿轮转动的二号驱动件,所述夹持臂上设有用于驱动夹持爪转动的三号驱动件,所述导轨上设有用于驱动螺杆转动的四号驱动件。
6.通过采用上述技术方案,工作时,通过齿轮带动弧形传动轨运动从而带动夹持爪上下运动,之后通过螺杆转动来伸缩夹持臂来夹持工件,之后通过一号驱动件转动底座将工件移动至放料台放下,该设计结构简单体型较小,从而极大的降低成本。
7.进一步设置为:所述底座上形成有供弧形传动轨穿过的限位槽,所述限位槽限制弧形传动轨沿转轴轴线运动。
8.通过采用上述技术方案,限位槽可以防止弧形传动轨沿转轴的轴线发生偏移。
9.进一步设置为:所述弧形传动轨外周壁设有第二传动齿,所述第二传动齿沿着弧形传动轨的外周壁环绕排列设置,所述限位槽内转动设有与第二传动齿啮合的承压齿轮。
10.通过采用上述技术方案,导轨、夹持臂和弧形传动轨的重力原先都施加于转轴上,通过在增加与弧形传动轨外周壁相啮合的承压齿轮可以分担转轴所受到的压力,增加使用寿命。
11.进一步设置为:所述导轨上设有防尘罩,所述防尘罩与导轨转动连接使螺杆位于
防尘罩与导轨之间,所述防尘罩与导轨之间设有用于限位防尘罩盖住螺杆的限位组件。
12.通过采用上述技术方案,通过设置的防尘罩可以有效的防止工作中的一些粉尘落在螺杆上,从而降低螺杆与夹持臂之间的润滑性。
13.进一步设置为:包括设置于导轨上的二号转轴以及设置于防尘罩且与二号转轴转动配合的转孔,所述限位组件包括设置于导轨且供防尘罩插设的插槽,所述转孔沿插槽的插设方向延伸设置形成一长条形,所述二号转轴与转孔转动滑移配合供防尘罩插入插槽。
14.通过采用上述技术方案,防尘罩可将螺杆罩住防止粉尘接触螺杆,而转孔与插槽的作用再与限制防尘罩转动,需要打开防尘罩时将防尘罩向上拉使滑槽低端与二号转轴相抵后转动防尘罩即可。
15.综上所述,本实用新型具有以下有益效果:结构简单,体型小,成本低。
附图说明
16.图1为实施例的整体结构示意图;
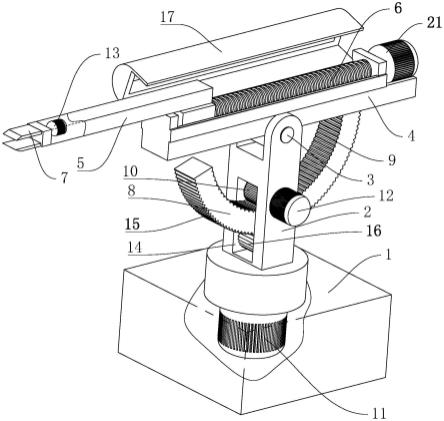
17.图2为实施例的限位组件结构示意图。
18.图中:1、机架;2、底座;3、一号转轴;4、导轨;5、夹持臂;6、螺杆;7、夹持爪;8、弧形传动轨;9、第一传动齿;10、齿轮;11、一号驱动件;12、二号驱动件;13、三号驱动件;14、限位槽;15、第二传动齿;16、承压齿轮;17、防尘罩;18、二号转轴;19、转孔;20、插槽;21、四号驱动件。
具体实施方式
19.以下结合附图对本实用新型作进一步详细说明。
20.参考图1至图2,一种模具自动压铸机械手臂,包括机架1,机架1上转动设有底座2,底座2上通过一号转轴3转动设置有导轨4,导轨4转动形成的旋转面与底座2转动形成的旋转面两者之间相互垂直,导轨4上滑动设置有夹持臂5,导轨4上设有与夹持臂5螺纹连接的且转动设置于导轨4上的螺杆6,夹持臂5末端转动连接有夹持爪7,夹持爪7为气动夹持爪7,导轨4上设有随导轨4转动的弧形传动轨8,弧形传动轨8的圆心与一号转轴3的圆心同心设置,弧形传动轨8的内周壁设有第一传动齿9,第一传动齿9沿着弧形传动轨8的内周壁环绕排列设置,底座2上转动设有与第一传动齿9啮合用于带动弧形传动轨8转动的齿轮10,机架1上设有驱动底座2转动的一号驱动件11,一号驱动件11为电机,底座2上设有用于驱动齿轮10转动的二号驱动件12,二号驱动件12为电机,夹持臂5上设有用于驱动夹持爪7转动的三号驱动件13,三号驱动件13为电机,导轨4上设有用于驱动螺杆6转动的四号驱动件21,四号驱动件21为电机。
21.底座2上形成有供弧形传动轨8穿过的限位槽14,限位槽14限制弧形传动轨8沿转轴轴线运动,弧形传动轨8外周壁设有第二传动齿15,第二传动齿15沿着弧形传动轨8的外周壁环绕排列设置,限位槽14内转动设有与第二传动齿15啮合的承压齿轮16。
22.导轨4上设有防尘罩17,防尘罩17与导轨4转动连接使螺杆6位于防尘罩17与导轨4之间,防尘罩17与导轨4之间设有用于限位防尘罩17盖住螺杆6的限位组件,包括设置于导轨4上的二号转轴18以及设置于防尘罩17且与二号转轴18转动配合的转孔19,限位组件包括设置于导轨4且供防尘罩17插设的插槽20,转孔19沿插槽20的插设方向延伸设置形成一
长条形,二号转轴18与转孔19转动滑移配合供防尘罩17插入插槽20。
23.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
技术特征:
1.一种模具自动压铸机械手臂,包括机架(1),其特征在于:所述机架(1)上转动设有底座(2),所述底座(2)上通过一号转轴(3)转动设置有导轨(4),所述导轨(4)转动形成的旋转面与底座(2)转动形成的旋转面两者之间相互垂直,所述导轨(4)上滑动设置有夹持臂(5),所述导轨(4)上设有与夹持臂(5)螺纹连接的且转动设置于导轨(4)上的螺杆(6),所述夹持臂(5)末端连接有夹持爪(7),所述导轨(4)上设有随导轨(4)转动的弧形传动轨(8),所述弧形传动轨(8)的圆心与一号转轴(3)的圆心同心设置,所述弧形传动轨(8)的内周壁设有第一传动齿(9),所述第一传动齿(9)沿着弧形传动轨(8)的内周壁环绕排列设置,所述底座(2)上转动设有与第一传动齿(9)啮合用于带动弧形传动轨(8)转动的齿轮(10),所述机架(1)上设有驱动底座(2)转动的一号驱动件(11),所述底座(2)上设有用于驱动齿轮(10)转动的二号驱动件(12),所述夹持臂(5)上设有用于驱动夹持爪(7)转动的三号驱动件(13),所述导轨(4)上设有用于驱动螺杆(6)转动的四号驱动件(21)。2.根据权利要求1所述的模具自动压铸机械手臂,其特征在于:所述底座(2)上形成有供弧形传动轨(8)穿过的限位槽(14),所述限位槽(14)限制弧形传动轨(8)沿一号转轴(3)轴线运动。3.根据权利要求2所述的模具自动压铸机械手臂,其特征在于:所述弧形传动轨(8)外周壁设有第二传动齿(15),所述第二传动齿(15)沿着弧形传动轨(8)的外周壁环绕排列设置,所述限位槽(14)内转动设有与第二传动齿(15)啮合的承压齿轮(16)。4.根据权利要求1所述的模具自动压铸机械手臂,其特征在于:所述导轨(4)上设有防尘罩(17),所述防尘罩(17)与导轨(4)转动连接使螺杆(6)位于防尘罩(17)与导轨(4)之间,所述防尘罩(17)与导轨(4)之间设有用于限位防尘罩(17)盖住螺杆(6)的限位组件。5.根据权利要求4所述的模具自动压铸机械手臂,其特征在于:包括设置于导轨(4)上的二号转轴(18)以及设置于防尘罩(17)且与二号转轴(18)转动配合的转孔(19),所述限位组件包括设置于导轨(4)且供防尘罩(17)插设的插槽(20),所述转孔(19)沿插槽(20)的插设方向延伸设置形成一长条形,所述二号转轴(18)与转孔(19)转动滑移配合供防尘罩(17)插入插槽(20)。
技术总结
本实用新型公开了一种模具自动压铸机械手臂,包括机架,机架上转动设有底座,底座上通过一号转轴转动设置有导轨,导轨转动形成的旋转面与底座转动形成的旋转面两者之间相互垂直,导轨上滑动设置有夹持臂,导轨上设有与夹持臂螺纹连接的且转动设置于导轨上的螺杆,夹持臂末端连接有夹持爪,导轨上设有随导轨转动的弧形传动轨,弧形传动轨的圆心与一号转轴的圆心同心设置,弧形传动轨的内周壁设有第一传动齿,第一传动齿沿着弧形传动轨的内周壁环绕排列设置,底座上转动设有与第一传动齿啮合用于带动弧形传动轨转动的齿轮。本实用新型具有以下优点和效果:本实用新型结构简单,体型小,成本低。成本低。成本低。
技术研发人员:余斌 林建通 李聪聪
受保护的技术使用者:温州市山福工贸有限公司
技术研发日:2021.12.31
技术公布日:2022/6/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。