1.本公开涉及飞行器领域,并且具体地,涉及飞行器部件的制造。
背景技术:
2.大型复合部件(诸如跨越数十英尺的大型复合部件)在工厂车间内占据大量空间。这些部件的层压件铺设在固定工作单元中的心轴上。将心轴移动到另一固定工作单元,并且将层压件硬化成复合部件。接下来,复合部件与心轴分离。在脱模之后立即修整(trim)复合部件的制造余量部。然后将复合部件传输到新的固定工作单元以接收作业,例如ndi检查。每次传输发生时,复合部件必须与固定工作单元对准。与各个固定工作单元的对准增加了制造工艺的时间和复杂性。
3.专利文献ep 2881234a1根据其摘要描述了:一种用于通过在模具中形成扁平纤维复合半成品来生产纤维复合部件的半成品布置,该半成品布置包括纤维复合半成品和延伸超过纤维复合半成品的边缘的多个保持元件。保持元件凹进纤维复合半成品的凹槽中,以避免在高度方向上突出。这允许纤维复合半成品的边缘在再成形期间至少部分地在模制工具内延伸。还提供了一种使用半成品布置来生产纤维复合部件的方法。
4.专利文献us 2004/217497a1根据其摘要描述了:一种用于制造复合部件的方法和设备包括:在铺设工具上模制复合部件;在所述部件在所述铺设工具上的同时,机加工第一表面的牺牲部分以用于将第一硬件装置与所述复合部件固定;以及在所述部件在所述铺设工具上的同时,切割所述部件,形成外围边缘。所述方法可以进一步包括将第一硬件装置定位成与复合部件的机加工界面接触,并且机加工所述部件包括在部件在铺设工具上时钻出穿过硬件装置和部件的多个定位孔。机加工可以包括机加工牺牲部分,产生机加工界面并且将硬件装置定位在机加工界面上。
5.专利文献ep 3034284a1根据其摘要描述了:一种用于制造cfrp部件的方法包括以下步骤:在包括标记工具的模具上铺设一个或更多个预浸或复合层片;在未固化的层压件上形成具有引导标记的未固化层压件;固化层压件,从而赋予部件具有引导标记的最终形状;以及以引导标记为参考(reverence)对cfrp部件进行修整和/或钻孔。此外,提供了一种用于模制和固化cfrp部件的模具,该模具包括适于在新cfrp部件上执行引导标记的标记工具,以及用于制造模制cfrp部件的系统。
6.用于制造大型复合部件的现有技术导致每次移动复合部件时需要大量时间来进行探测和检查大型部件。因此,期望有一种考虑了上面讨论的问题中的至少一些以及其它可能的问题的方法和设备。
技术实现要素:
7.本文描述的实施方式提供了用于将转位(index)特征制造到位于心轴处的复合部件中的系统和方法。作为刚性工具的心轴已经被机加工到期望的精度水平。通过跟踪放置在心轴中的转位特征,机器可以快速地将转位特征精确地应用于在其上硬化的复合部件。
在移除复合部件之后,其整体转位特征被用于快速将复合部件转位至一个或更多个工位,当复合部件在处理方向上移动时,该一个或更多个工位在复合部件上执行作业。
8.一个实施方式是一种用于制备用于组装的复合部件的方法。所述方法包括接收复合部件已经模制到其上的心轴,并且操作工位(work station)以将转位特征安装到复合部件的制造余量部(excess)。
9.另一个实施方式是一种用于制备用于组装的复合部件的系统。所述系统包括心轴,该心轴在传输复合部件的同时沿处理方向移动。心轴包括用于复合部件的铺设表面,以及设置在预定位置处的转位特征。所述系统进一步包括:工位,该工位转位到心轴处的转位特征,并且将转位特征安装到复合部件上,该转位特征偏离(offset)心轴处的转位特征;以及下游工位,该下游工位转位到安装到复合部件上的转位特征。
10.另一个实施方式是一种用于处理复合部件的方法。所述方法包括接收复合部件已经模制到其上的心轴,并且基于位于心轴中的转位特征来处理复合部件。
11.又一个实施方式是一种包含编程指令的非暂时性计算机可读介质,所述编程指令在由处理器执行时可操作用于执行制备用于组装的复合部件的方法。该方法包括:接收复合部件已经模制到其上的心轴,并且操作工位以将转位特征安装到复合部件的制造余量部中。
12.根据本公开的一个方面,提供了一种用于制备用于组装的复合部件的方法,所述方法包括以下步骤:将具有制造余量部的预成型件放置在心轴上;在仍位于心轴上的同时将所述预成型件硬化成具有硬化的制造余量部的复合部件;以及在从心轴脱模之前,将转位特征件安装到预硬化和/或硬化后的所述制造余量部中。
13.有利地,所述方法进一步包括:将所述复合部件从所述心轴上脱模;沿处理方向推进所述复合部件;以及经由安装到所述复合部件中的转位特征将复合部件转位到下游工位。
14.优选地,所述方法进一步包括操作心轴工位以在将复合部件从心轴脱模之前将转位特征安装到复合部件的制造余量部中。
15.优选地,所述方法进一步包括在脱模之前将毛刺边缘(flash edge)与复合部件分离。
16.优选地,所述方法进一步包括将心轴工位转位到心轴处的心轴转位特征。
17.优选地,在所述方法中,安装到复合部件的制造余量部中的转位特征偏离心轴转位特征。
18.优选地,在所述方法中,将心轴工位转位到心轴处的心轴转位特征的步骤包括将心轴工位的互补键插入到心轴处的对应键槽中。
19.优选地,在所述方法中,心轴工位沿着心轴处的凹槽而行。
20.优选地,在所述方法中,心轴工位沿着心轴处的轨道而行。
21.优选地,在所述方法中,操作心轴工位以安装转位特征的步骤包括使用钻孔、铣削或修整的减材(subtractive)制造或通过诸如添加销、添加rfid标签或添加条形码的增材(additive)制造。
22.优选地,在所述方法中,心轴工位切穿复合部件进入心轴的灌封凹部(potted recess)中,以将转位特征安装到复合部件中。
23.优选地,在所述方法中,安装转位特征的步骤包括在复合部件的心轴处的支承边缘和/或边缘中安装凹口(notch)。
24.优选地,在所述方法中,安装转位特征的步骤包括在制造余量部中安装转位特征,该制造余量部选自由复合部件上的窗制造余量部和/或门制造余量部以及天线切口区域组成的组。
25.优选地,在所述方法中,操作心轴工位以安装转位特征的步骤包括安装多种类型的转位特征,其中,不同类型的转位特征由不同的下游工位使用。
26.优选地,在所述方法中,安装到复合部件的制造余量部中的转位特征选自由以下项组成的组:杯定位特征、钻孔起始位置、钻通孔位置、狭槽(slot)、安装销、rfid标签条形码、形成的转位特征和凹口。
27.优选地,在所述方法中,使用选自由以下项组成的组的心轴转位特征将转位特征安装到复合部件的制造余量部中:凹痕、突起、脊、凹槽、凹口、通孔、盲孔、rfid标签和条形码。
28.根据如上所述的方法组装的飞行器的一部分是本公开的一部分。
29.根据本公开的一个方面,提供了一种用于制备用于组装的复合部件的系统,该系统包括:心轴以及心轴工位,所述心轴包括:用于复合部件的铺设表面;以及设置在心轴处的心轴转位特征;所述心轴工位转位到心轴转位特征,并且将转位特征安装到复合部件上,该转位特征偏离心轴转位特征。
30.有利地,在所述系统中,下游工位转位到转位特征。
31.优选地,在所述系统中,下游工位在复合部件已经从心轴脱模之后接收复合部件。
32.优选地,所述系统进一步包括心轴在传输复合部件的同时沿处理方向移动。
33.优选地,在所述系统中,所述心轴工位包括转位特征工具,所述转位特征工具在不切穿所述复合部件的情况下切入到所述复合部件中。
34.优选地,在所述系统中,将心轴工位的互补键插入到心轴处的相应键槽中,以将心轴工位转位到心轴转位特征。
35.使用上面描述的系统制造飞行器的一部分是本公开的一部分。
36.根据本公开的一个方面,提供了一种用于处理复合部件的方法,所述方法包括以下步骤:接收复合部件已经模制到其上的心轴;以及基于位于心轴上的转位特征来处理复合部件。
37.有利地,处理复合部件的所述方法包括:在脱模之前将转位特征安装到复合部件中。
38.优选地,所述方法进一步包括:处理复合部件,处理复合部件的步骤包括在脱模之前将毛刺边缘与复合部件分离。
39.优选地,所述方法进一步包括:将复合部件从心轴脱模,在处理方向上推进复合部件的,并且经由安装到复合部件中的转位特征将复合部件转位到下游工位。
40.优选地,所述方法进一步包括:操作心轴工位以在将复合部件从心轴脱模之前将转位特征安装到复合部件的制造余量部中。
41.优选地,所述方法进一步包括:将心轴工位转位到心轴处的心轴转位特征。
42.优选地,所述方法进一步包括:安装到复合部件的制造余量部中的转位特征偏离
心轴处的心轴转位特征。
43.优选地,所述方法进一步包括:将心轴工位转位到心轴处的心轴转位特征,将心轴工位转位到心轴处的心轴转位特征的步骤包括将心轴工位的互补键插入到心轴处的对应键槽中。
44.优选地,所述方法进一步包括:心轴工位沿着心轴处的凹槽和/或轨道而行。
45.优选地,所述方法进一步包括:操作心轴工位以安装转位特征,操作心轴工位以安装转位特征的步骤包括在不切穿复合部件的情况下切入到复合部件中。
46.优选地,所述方法进一步包括:所述心轴工位切穿所述复合部件进入到所述心轴的灌封凹部中,以安装所述转位特征。
47.优选地,所述方法进一步包括:安装转位特征,安装转位特征的步骤包括在复合部件的心轴处的支承边缘和/或边缘中安装凹口。
48.优选地,所述方法进一步包括:安装转位特征,安装转位特征的步骤包括在复合部件的支承边缘中安装凹口。
49.优选地,所述方法进一步包括:安装转位特征,安装转位特征的步骤包括将转位特征安装在制造余量部、窗制造余量部和/或门制造余量部中。
50.优选地,所述方法进一步包括:从复合部件移除除制造余量部。
51.优选地,所述方法进一步包括:操作心轴工位以安装转位特征,操作心轴工位以安装转位特征的步骤包括安装多种类型的转位特征,其中,不同类型的转位特征由不同的下游工位使用。
52.优选地,所述方法进一步包括:安装到复合部件的制造余量部、窗制造余量部和/或门制造余量部中的转位特征选自由以下项组成的组:杯定位特征、钻孔起始位置、钻通孔位置、狭槽、安装销、rfid标签条形码、形成的转位特征和凹口。
53.根据如上所述的方法组装的飞行器的一部分是本公开的一部分。
54.根据本公开的一个方面,提供了一种用于形成复合部件的设备,所述设备包括:心轴,该心轴限定了复合部件的轮廓,所述心轴包括:灌封凹部,所述灌封凹部设置在用于所述复合部件的铺设区域中,位于为复合部件的制造余量部提供铺设区域的位置下方;以及转位轮廓特征,所述转位轮廓特征设置在所述铺设区域内。
55.有利地,在所述设备中,所述心轴进一步包括设置在所述铺设区域之外的键槽。
56.有利地,在所述设备中,所述心轴进一步包括设置在所述铺设区域之外的凹槽,该凹槽引导心轴工位。
57.使用上面描述的设备制造飞行器的一部分是本公开的一部分。
58.根据本公开的一个方面,提供了一种用于制备用于组装的复合部件的系统,所述系统包括:心轴,所述心轴包括用于所述复合部件的铺设区域;复合部件,所述复合部件放置在所述铺设区域上;以及心轴转位特征,所述心轴转位特征设置在所述心轴处。
59.有利地,所述系统进一步包括转位到心轴转位特征的心轴工位。
60.优选地,所述系统进一步包括心轴工位将转位特征安装到复合部件上,该转位特征偏离心轴转位特征。
61.优选地,所述系统进一步包括设置在铺设区域中、位于为复合部件的制造余量部提供铺设区域的位置下方的灌封凹部。
62.优选地,所述系统进一步包括心轴,所述心轴进一步包括设置在铺设区域之外的键槽。
63.优选地,在所述系统中,所述心轴进一步包括设置在铺设区域之外的凹槽,该凹槽引导心轴工位。
64.优选地,所述系统进一步包括毛刺边缘,并且在脱模之前,制造余量部与复合部件分离。
65.优选地,在所述系统中,在滑槽系统中收集分离的毛刺边缘和分离的制造余量部。
66.使用上面描述的系统制造飞行器的一部分是本公开的一部分。
67.根据本公开的一个方面,提供了一种转位特征安装器,所述转位特征安装器包括:心轴工位;以及联接到心轴工位的特征创建器。
68.有利地,转位特征安装器进一步包括联接到心轴工位的发射器。
69.优选地,转位特征安装器进一步包括联接到心轴工位的转位键。
70.优选地,在转位特征安装器中,转位键包括互补键。
71.优选地,在转位特征安装器中,特征创建器选自由刀片、钻头、铣刀、销安装器、rfid标签安装器、条形码安装器和紧固件安装器组成的组。
72.优选地,在转位特征安装器中,心轴工位联接到心轴。
73.优选地,在转位特征安装器中,心轴工位通过心轴中的凹槽联接到心轴。
74.优选地,在转位特征安装器中,心轴工位通过可滑动地接合凹槽而相对于制造余量部是可传输的。
75.优选地,在转位特征安装器中,心轴工位通过经由辊系统可滑动地接合凹槽而相对于制造余量部是可传输的。
76.优选地,在转位特征安装器中,心轴工位通过心轴上的轨道联接到心轴。
77.优选地,在转位特征安装器中,心轴工位通过可滑动地接合轨道而相对于制造余量部是可传输的。
78.优选地,在转位特征安装器中,心轴工位通过经由辊系统可滑动地接合轨道而相对于制造余量部是可传输的。
79.优选地,转位特征安装器进一步包括构造成与心轴转位特征互补配合的互补键。
80.优选地,转位特征安装器进一步包括选自由往复刀片或圆形刀片组成的组的刀片。
81.优选地,在转位特征安装器中,心轴工位包括控制器。
82.下面可以描述其他例示性实施方式(例如,与前述实施方式相关的方法和计算机可读介质)。已经讨论的特征、功能和优点可以在各种实施方式中独立地实现,或者可以在其他实施方式中组合,其进一步的细节可以参考下面的描述和附图看到。
附图说明
83.现在仅通过示例并且参考附图来描述本公开的一些实施方式。在所有附图中,相同的附图标记表示相同的元件或相同类型的元件。
84.图1描绘了例示性实施方式中的组装的飞行器,包括机身部分的图示。
85.图1a是在例示性实施方式中用于将转位特征安装到半筒段中的组装环境的框图。
86.图1b是在例示性实施方式中用于将转位特征安装到翼板中的组装环境的框图。
87.图2a是例示出在例示性实施方式中用于将转位特征应用于复合部件的方法的流程图。
88.图2b是例示出在例示性实施方式中用于处理复合部件的方法的流程图。
89.图3描绘了在例示性实施方式中用于将转位特征安装到复合部件中的机器。
90.图3a至图3d描绘了在例示性实施方式中用于将转位特征安装到复合部件中的另一机器。
91.图4至图5是在例示性实施方式中包括通过参考心轴处的转位特征而安装的转位特征的复合部件的视图。
92.图6至图7是在例示性实施方式中与安装转位特征的机器的键配合的键槽的视图。
93.图8是在例示性实施方式中安装在复合部件处的各种转位特征的侧视图。
94.图9至图12是在例示性实施方式中的图8的转位特征的截面剖视图。
95.图13至图14是在例示性实施方式中转位到安装到复合部件上的转位特征的下游工位的视图。
96.图15是在例示性实施方式中的飞行器生产和服务方法的流程图。
97.图16是在例示性实施方式中的飞行器的框图。
具体实施方式
98.附图和以下描述提供了本公开的特定例示性实施方式。因此,应当理解,本领域技术人员将能够设计各种布置,这些布置虽然未在本文中明确描述或示出,但是体现了本公开的原理并且被包括在本公开的范围内。此外,本文描述的任何示例旨在帮助理解本公开的原理,并且应当被解释为不限于这些具体记载的示例和条件。因此,本公开不限于下面描述的特定实施方式或示例,而是由权利要求书及其等同物限定。
99.复合部件(例如碳纤维增强聚合物(cfrp)部件)最初在多个层中铺设,这些层一起被称为预成型件或层压件。预成型件的各个层内的各个纤维彼此平行对齐,但是不同的层表现出不同的纤维定向(orientation),以提高所获得的复合部件沿不同维度的强度。预成型件包括粘性树脂,该粘性树脂固化以将预成型件硬化成复合部件(例如,用于飞行器中)。已经用未固化的热固性树脂或热塑性树脂浸渍的碳纤维被称为“预浸料”。其它类型的碳纤维包括“干纤维”,其未用热固性树脂浸渍,但可能包括增粘剂或粘合剂。干纤维在固化之前注入树脂。对于热固性树脂,硬化是一种被称为固化的单向工艺,而对于热塑性树脂,如果被重新加热,则树脂会达到粘性形式。
100.现在转向图1,描绘了其中可以实现例示性实施方式的飞行器的图示。飞行器10是可以分别形成图1、图1a、图1b的隔板(caul plate)150、150-1的飞行器的示例。飞行器10是由机身12的半筒段24形成的飞行器10的示例。
101.在该例示性示例中,飞行器10具有附接到主体38的机翼15和机翼16。飞行器10包括附接到机翼15的发动机14和附接到机翼16的发动机14。
102.主体28具有尾段18。水平稳定器20、水平稳定器21和垂直稳定器22附接到主体38的尾段18。
103.机身12由半筒段24制成,其中上半筒段26接合到下半筒段28以形成完整的筒段
29-1、29-2、29-3、29-4、29-n。如29-n所例示,存在n个完整筒段。完整的筒段串联连接,例如首尾相连,以形成机身12。
104.机翼15和机翼16由翼板30形成,翼板30包括连接在一起的上翼板32和下翼板34。段切面(section cut)46切穿上翼板32,并且对应于未硬化的预成型件189、189-1(图1a和图1b)。段切面46以大致垂直于上翼板32的弦向定向。
105.段切面44切穿复合部件55,并且对应于硬化之前的半筒段预成型件24-1(图3)。半筒段预成型件24-1对应于预成型件189。段切面44沿着纵梁穿过轮廓112-1纵向地181定向。
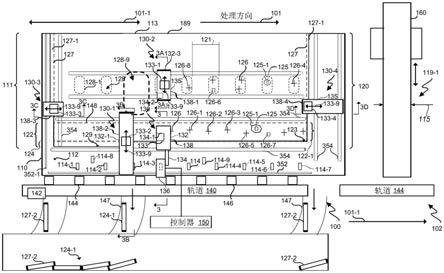
106.图1a、图1b是在例示性实施方式中用于将转位特征126、b126安装到复合部件120、120-1中和/或安装到复合部件120、120-1上的制造环境100、100-1的框图。在现有系统中,在脱模之后立即修整复合部件的制造余量部。制造环境100、100-1的独特之处在于它在后续组装期间利用传统上在脱模之后立即从复合部件120、120-1修整的材料。制造环境100、100-1包括可操作以将转位特征126、b126安装到复合部件120、120-1上的任何系统、装置或组件,所述复合部件120、120-1位于心轴110、110-1(例如,能够承受在复合部件120、120-1(诸如半筒段113或翼板113-1)的硬化期间施加的热和压力的刚性工具,诸如钢工具、复合工具、因瓦合金(invar)工具、铝工具等)的铺设区域111、111-1中的铺设表面112、112-1(例如,限定弯曲或平坦轮廓)上。如本文所使用的,转位特征126、b126包括集成到心轴或复合部件120、120-1中并且表征复合部件120、120-1(或心轴)在工位160-1的范围115-1内的一部分的物理、电气、光学或其他感官特征。
107.承载复合部件120、120-1的心轴110、110-1在制造期间沿处理方向101、101-9行进。在该实施方式中,心轴110、110-1在制造期间沿着轨道140、140-1(例如,具有辊、轨道或轨道组等的一系列离散支柱)行进,并且可以递增地脉动(pulse),以所谓的微脉动121的方式在处理方向101、101-9上诸如在其整个长度、几英尺至几英寸上递增地脉动。在另外的实施方式中,心轴110、110-1在处理方向101、101-9上连续行进。心轴110、110-1限定了用于放置的复合部件120、120-1的轮廓,诸如飞行器机身12的半筒段113或用于机翼15的翼板113-1。半筒段预成型件24-1在铺设期间被放置在心轴110、110-1上,然后被硬化成复合部件120、120-1。
108.心轴110、110-1具有心轴转位特征114、b114,例如凹痕114-1、b114-1、突起114-2、b114-2、脊114-3、b114-3、凹槽114-4、b114-4、凹口114-5、b114-5、通孔114-6、b114-6、盲孔114-7、b114-7、rfid标签114-8、b114-8、条形码114-9、b114-9等。虽然图1中例示出了所有的心轴转位特征114、114-1至114-9和b114、b114-1至b114-9,但是在各个半筒段113或翼板113-1上仅使用一种或几种类型的心轴转位特征114、b114并不少见。虽然所有心轴转位特征114、114-1至114-9和b114、b114-1至b114-9被例示为矩形,但是各个心轴转位特征114具有与该心轴转位特征114、b114(诸如凹痕114-1、b114-1、突起114-2、b114-2、脊114-3、b114-3、凹槽114-4、b114-4、凹口114-5、b114-5、通孔114-6、b114-6、盲孔114-7、b114-7、rfid标签114-8、b114-8、条形码114-9、b114-9)的形状相称的形状。心轴转位特征114、b114能够直接用于将转位特征126、b126放置到半筒段113或翼板113-1上,而其它心轴转位特征114、b114适应制造余量部122、122-9的修整。制造余量部122、122-9的修整产生与毛刺边缘124、124-9分离的毛刺边缘124-1、124-8,并在心轴110、110-1处产生支承边缘123和边缘129-1。在心轴110处的半筒段113或翼板113-1的钻孔和/或铣削分别将转位特征126、b126
添加到复合部件120、120-1。分离的毛刺边缘124-1、124-8和分离的制造余量部127-2、124-8被收集在滑槽系统147中。滑槽系统147便于在从心轴110、110-1脱模之前从移除的材料位置移除修整掉的材料,诸如分离的毛刺边缘124-1、124-8和分离的制造余量部127-2、124-8。此外,心轴110上的转位轮廓特征125是凹陷、凹痕、凹坑、凸起或脊,它们分别填充有树脂和增强纤维或使树脂和增强纤维移位,从而在硬化之前将转位特征126-8、b126-8赋予制造余量部122-1、122-9、128,其通过硬化工艺制成永久的。图1a示出了通过制造余量部122-1的切穿视图125-1的转位轮廓特征125。心轴110、110-1上的转位轮廓特征125还将转位特征126、b126传送到窗制造余量部128和/或门制造余量部128-9中。修整边缘128-1在窗制造余量部128分离之后保留。灌封凹部322(图3)是填充有灌封化合物并精加工成心轴110、110-1表面轮廓313的凹部。在穿过复合部件120、120-1并进入到心轴110、110-1中的钻孔或修整过程中的过冲(overshoot)进入灌封凹部322并刺穿表面轮廓313,并且导致在再次使用心轴110之前需要恢复表面轮廓313。也就是说,在由于钻孔或切割造成的刺穿之后心轴110、110-1的表面轮廓313和轮廓313被恢复以考虑在脱模之前发生的切割或钻孔中的任何过冲。在钻孔、铣削和/或修整期间刺穿表面轮廓313到灌封凹部322中使心轴和钻孔、铣削和/或修整装置免受不可修复的损坏。灌封凹部322通过添加灌封化合物而容易地返回到表面轮廓313。致动器330和340调整互补键310和转位特征工具320的位置。
109.心轴工位130、130-6、130-7将其自身与心轴110中的心轴转位特征114对准,所述心轴转位特征114被精确地加工并定位到心轴110中。在与心轴110对准之后,心轴工位130、130-6、130-7将转位特征126、b126安装到复合部件120、120-1上。在心轴工位130、130-6、130-7和心轴转位特征114、114-1至114-9和b114、b114-1至b114-9的帮助下,这些转位特征126、b126被安装在复合部件120、120-1上的位置处。转位特征126安装在制造余量部122-1处或窗制造余量部128内。转位特征b126安装在制造余量部122-9处,或者换句话说,安装在边缘129-1与最终修整部148-2之间。利用心轴110、110-1的精度和心轴110、110-1上的铺设来相对于复合部件120、120-1(诸如半筒段113和/或113-1)定位转位特征126、b126。在制造期间,复合部件120、120-1被精确地铺设到心轴110上。转位特征126、b126将心轴转位特征114、b114的精度携带到复合部件120、120-1中,并且通过后脱模制造工艺将其携带,直到最终分离制造余量部122-1、122-9和128。心轴110、110-1处的心轴转位特征114、b114使得心轴工位130、130-6、130-7能够精确地对准到心轴110、110-1。在复合部件120、120-1已经从心轴110、110-1移除之后,转位特征126、b126促进复合部件120、120-1到下游工位160、160-1(诸如工位160、160-1)的转位119、119-1。转位特征126、b126包括用于杯和锥体布置(图4)的杯定位特征126-1、b126-1、钻孔起始位置126-2、b126-2(图5)、钻通孔位置126-3、b126-3(图6)、狭槽126-4、b126-4(图7)、安装销126-5、b126-5(图8)、rfid标签126-6、b126-6(图9)、条形码126-7、b126-7(图10)、形成的转位特征126-8、b126-8(图11)、凹口126-9、b126-9(图12)。在复合部件(120、120-1)的心轴110、110-1处的支承边缘123、边缘127和/或边缘129-1中安装凹口126-9、b126-9以安装转位特征126、b126。虽然例示出了所有这些转位特征,但是通常仅多种不同类型将出现在复合部件120(诸如半筒段113或翼板113-1)上。心轴110、110-1的心轴转位特征114、b114中的一些位于复合部件120的最终修整部129、129-1之下或之外,而转位特征126、b126分别安装在复合部件120、120-1的支承边缘123上方或边缘129-1与最终修整部148-2之间。支承边缘123是复合部件120的边缘,其在脱模之后支承复
合部件120的重量。形成的转位特征126-8、b126-8在铺设和硬化期间产生,这是因为在硬化发生之前在成形复合部件120、120-1的转位轮廓特征125上形成转位特征126-8、b126-8并且通过硬化过程使其永久化。形成的转位特征126-8存在于硬化复合部件120、120-1中。复合部件120、120-1中的各个转位特征126、b126对于脱模之后的组装线102、102-1处的一个或更多个工位160、160-1可以是共用的(即,由其使用),并且各个转位特征126、126-1至126-8和b126、b126-1至b126-8的精度被定制为针对利用转位特征126、126-1至126-8和b126、b126-1至b126-8的工位160、160-1确定的公差。例如,需要精确操作的工位160、160-1可能需要更严格公差的转位特征126、b126。此外,转位特征126、b126相对于半筒段113或翼板113-1的不同布置、位置或图案可以指示分别要由工位160、160-1执行的指令。心轴工位130-6、130-7是心轴工位130的框图表示。心轴工位130-6还能够产生分离的毛刺边缘124-8。心轴工位130-6、130-7具有与心轴工位130和130-6相同的能力,不同之处在于它在轨道354上横穿心轴110-1,而不使用凹槽352。另一种可能性是使心轴工位130-6和心轴工位130-7同时承载在轨道354和凹槽352两者上,以沿着边缘148-2修整并安装转位特征b126。另一种可能性是使心轴工位130安装转位特征126,并且还在单个工位中在沿着心轴110、110-1的单次或多次通过中切割支承边缘123。转位特征126至126-8和转位特征b126至b126-8分别通过使用钻孔、铣削或修整的减材制造或通过(诸如添加销126-5、b126-5、添加rfid标签126-6、b126-6或添加条形码126-7、b126-7的)增材制造联接至复合部件120、120-1。虽然各个心轴工位130-5、130-6、130-7、130-8的类型示出为仅沿着一个边缘,但可以使一种类型的工位服务多个边缘。四个心轴工位130-5可以服务四个边缘中的每一个,或者两个心轴工位130-6和两个心轴工位130-7可以各自加工一个边缘,或者三个或四个心轴工位130-8可以各自加工一个边缘,并且心轴工位130-5可以加工一个边缘。因此,心轴工位130-5、130-6、130-7、130-8的任何组合能够用于服务特定边缘。
110.在另外的实施方式中,心轴转位特征114、b114被实现为联接到心轴110、110-1的射频标识符(rfid)标签114-8、b114-8。在这样的实施方式中,心轴工位130、130-6、130-7与由心轴转位特征114、b114提供的信息交互以表征心轴110、110-1,并且使用该信息来确定用于接收转位特征126、b126的位置。在另外的实施方式中,心轴工位130、130-6、130-7以rfid标签114-8的形式安装转位特征126、b126,各个转位特征表征在工位160、160-1的范围115、115-1内的复合部件120、120-1的一部分。
111.在硬化之后,对复合部件120、120-1进行粗修整以形成制造余量部122-1的支承边缘123。例如,粗修整可以从复合部件120移除毛刺边缘124,诸如包括具有树脂和增强纤维的部分或者仅一种或另一种的铺设的粗边缘。粗修整在从心轴110脱模之前产生支承边缘123和边缘129-1。移除的材料是与制造余量部122、122-9分离的毛刺边缘124-1、124-8。窗制造余量部128通常在安装窗框之后被移除,并且窗被安装在下游工位160处。虽然被例示出为安装在制造余量部122、122-9中,但是在另外的实施方式中,转位特征126、b126被安装到其他形式的制造余量部中,诸如窗制造余量部128、门切口区域(未示出)或天线切口区域(未示出)。
112.心轴工位130、130-6、130-7包括特征创建器132,诸如刀片137、钻头、铣刀、销安装器、rfid标签安装器、条形码安装器、紧固件安装器或其他机械工具,以通过移除材料、添加材料或可扫描装置来将转位特征126、b126安装到复合部件120。参见图1a、图1b和图3,特征
创建器132修整复合部件120、120-1的设置在心轴110、110-1处的部分。切割操作通常在将复合部件120、120-1从心轴110、110-1脱模之前执行,并且留下足够量的制造余量部122-1、122-9以包括转位特征126、b126和支承边缘123,分别供组装线102、102-1中的工位160、160-1使用。特征创建器132用于在制造过程期间在将边缘修整为最终修整部148、148-2之前施加初步切割,该初步切割向复合部件120、120-1提供支承边缘123或边缘129-1。切割器133提供所有修整、铣削或钻孔以从产生与制造余量部122-1、122-9分离的毛刺边缘124-1、124-8。在脱模之前进行修整节省了将复合部件120、120-1(诸如半筒段113和/或翼板113-1)放置到仅专用于修整复合部件120、120-1的单元中的非增值时间(non-value added time)。在专用单元场景中,复合部件120、120-1在修整之前被转位到单元和包括切割器的修整设备以产生最终修整部,并且然后在重复过程中将复合结构120转位到各个连续单元以扫描部件周边和轮廓。应注意,术语复合结构120和复合部件120在整个申请中可互换地使用。当在整个组装过程中从一个工位移动到另一个工位时,使用制造余量部122-1和128来传送转位特征126节省了很多(如果不是全部)重复的部件周边和轮廓可扫描处理。此外,使用支承边缘123作为组装线102、102-1中的传输过程的一部分保护最终修整部148、148-2的边缘免受碰撞损坏,直到包括支承边缘123和制造余量部122-9的制造余量部122-1被分离。对支承边缘123的任何损坏(特别是在脱模之后)可以在用制造余量部122-1修整掉之前根据需要进行粗修补,以恢复组装线102上的传输能力。
113.心轴工位130进一步包括支撑件134(例如,刚性杆、诸如机器人臂、运动链或其他组件等的致动连杆),该支撑件134能够将特征创建器132对准就位。心轴工位130-6、130-7是心轴工位130的框图表示。心轴工位130-6、130-7具有与心轴工位130和130-6相同的能力,不同之处在于它在轨道354上横穿心轴110-1而不使用凹槽352。另一种可能性是使心轴工位130-6和心轴工位130-7同时承载在轨道354和凹槽352两者上,以沿着边缘148-2修整并安装转位特征b126。另一种可能性是使心轴工位130安装转位特征126,并且还在单个工位中在沿着心轴110、110-1的单次或多次通过中切割支承边缘123。心轴工位130还包括转位键136,该转位键136与心轴转位特征114(例如凹痕114-1、突起114-2、脊114-3、凹槽114-4、凹口114-5、通孔114-6、盲孔114-7)互补地配合,以将特征创建器132相对于心轴110锁定就位。心轴工位130至130-8包括转位特征安装器和转位键136。转位键136与凹痕114-1、突起114-2、脊114-3、凹槽114-4、凹口114-5、通孔114-6、盲孔114-7的互补配合从心轴110传送关于转位特征126相对于复合部件120的放置和类型的消息。心轴工位130将通过转位键136与心轴转位特征114的配合而传送的消息生效(into operation),以将转位特征126、126-1至126-8和b126、b126-1至b126-8定位和安装到制造余量部122-1中或者定位和安装到制造余量部122-1上。在一个实施方式中,心轴工位130包括叶片137,诸如往复叶片或圆形叶片,和/或铣刀和/或钻头和控制系统,其驱动叶片137以在心轴110处对复合部件120的部分进行修整、铣削或钻孔。在将复合部件120从心轴110脱模之前执行该修整、铣削或钻孔操作,并且留下包括用于杯和锥体布置的杯定位特征126-1、b126-1、钻孔起始位置126-2、b126-2、钻通孔位置126-3、b126-3、狭槽126-4、b126-4、安装销126-5、b126-5的转位特征126、b126-5,以供组装线102-1中的工位160、160使用。rfid标签126-6和条形码126-7也由心轴工位130放置。rfid标签114-8和条形码114-9由rfid标签和/或条形码放置器329(图3至图3d)放置。
114.凹槽352用于相对于制造余量部122-1、128引导和传输切割器133,其中支撑件355-1可滑动地将其与辊系统350-1接合。该实施方式是悬臂安装到凹槽352中并且被沿着凹槽352引导,以便于将转位特征126、126-1至126-8和b126、b126-1至b126-8安装到制造余量部122-1、128中。切割器133从凹槽352悬臂伸出,其中一个或更多个辊系统350可滑动地接合切割器133并沿着心轴110推进切割器133,以便于产生转位特征126、126-1至126-8和b126、b126-1至b126-8。诸如凹痕114-1、突起114-2、脊114-3、凹槽114-4、凹口114-5、通孔114-6、盲孔114-7、rfid标签114-8、条形码114-9的心轴转位特征114通过诸如互补键310(图3)和/或rfid标签读取器325和/或条形码读取器325-1的转位键136接合。安装销126-5由销安装器327(图3和图3d)放置到由叶片137(图3a)形成的孔中。心轴工位130至130-8包括转位特征安装器和互补键310。切割器133具有在横向方向135上行进到特征创建器132的横向安装件133-9。切割器133包括刀片137,刀片137是往复刀片或圆形刀片或铣刀型切割刀片,以分别分离毛刺边缘124、124-9并产生支承边缘123或边缘129-1。当相对于轨道354在横向方向135上定位转位特征126时,在切割器133的横向方向135上行进的横向安装件133-9开始起作用。这可以通过使用相同的切割器133-1在距支承边缘123和/或边缘129-1的不同距离处将转位特征126、b126安装到制造余量部122、122-9中来实现。互补键310与心轴转位特征114(例如,凹痕114-1、突起114-2、脊114-3、凹槽114-4、凹口114-5、通孔114-6、盲孔114-7、rfid标签114-8和条形码114-9)互补地接合。将心轴工位130转位到心轴110、110-1处的心轴转位特征114包括将心轴工位130的互补键310插入到心轴110、110-1处的对应键槽312中。心轴工位130至130-8包括转位特征安装器和键槽312。
115.轮350使得能够相对于心轴110沿着凹槽352纵向101-1移动到心轴转位特征114中的下一个,并且互补键310便于转位特征工具320与心轴转位特征114(诸如凹痕114-1、突起114-2、脊114-3、凹槽114-4、凹口114-5、通孔114-6、盲孔114-7)在互补键310与心轴转位特征114配合时的精确对准。传感器331感测心轴转位特征114(例如,凹痕114-1、突起114-2、脊114-3、凹槽114-4、凹口114-5、通孔114-6、盲孔114-7)和对心轴工位130进行粗定位,使得互补键310可与心轴转位特征114配合。传感器331是光学传感器或检测心轴转位特征114的一些其他类型的传感器。心轴110转位特征114(例如rfid标签114-8,条形码114-9)将心轴转位特征114的位置传送到心轴工位130,以帮助定位每一者,然后使用传感器331将互补键310与心轴转位特征114配合。一个实施方式具有以齿条齿轮布置(rack and pinion arrangement)与轮350接合的凹槽352,所述齿条齿轮布置还可用于传送相对于心轴110的位置数据和/或相对于心轴110推进心轴工位130。因此,在一个实施方式中,心轴工位130沿着心轴110处的一个或更多个凹槽352而行,暂停并与心轴转位特征114配合。心轴工位130的其它实施方式使用具有凹槽352的多个轨道354,或仅使用多个轨道354而没有凹槽352。
116.一种具有切割器的柔性轨道类型的装置,所述切割器可移动地附接到两个轨道,该两个轨道可移除地附接到复合部件120,诸如半筒段113。轨道354被示出为可移除地附接到复合部件120,诸如半筒段113和心轴110。轨道354被真空联接或通过一些其他可移除的方式附接到复合部件120。壳体138横跨在轨道354与凹槽352之间,并且沿着轨道354和凹槽352传输。切割器133具有在横向方向135上行进到特征创建器132的横向安装件133-9。切割器133包括刀片137,刀片137是往复刀片或圆形刀片或铣刀型切割刀片,以分离毛刺边缘124、124-9并产生支承边缘123和边缘129-1。当相对于轨道354在横向方向上定位转位特征
126时,在切割器133的横向方向135上行进的横向安装件133-9开始起作用。辊系统353的实施方式在特征创建器132与轨道354之间具有齿条齿轮连接。一个实施方式在特征创建器132与凹槽352之间具有齿条齿轮连接。另一个实施方式具有直接在轨道140上承载的心轴工位130。
117.参见图1a和图3a,心轴工位130-1包括特征创建器132-1,诸如刀片、钻头、铣刀、销安装器、rfid标签安装器、条形码安装器或紧固件安装器或其他机械工具,以通过移除材料、添加材料或可扫描装置来将转位特征126安装到复合部件120。特征创建器132-1修整复合部件120的设置在心轴110处的部分。切割操作通常在复合部件120从心轴110脱模之前执行,并且将转位特征126放置在制造余量部128中,以供组装线102、102-1中的工位160、160-1使用。在脱模之前进行修整节省了将复合部件120、120-1(诸如半筒段113)放置到仅专用于修整的单元中并且在修整到产品周边之前转位到单元和切割器并且然后在重复的部件周边和轮廓可扫描处理中将复合结构120转位到各个连续的单元的非增值时间。当在整个组装过程中从一个工位移动到另一个工位时,使用制造余量部128来传送转位特征126节省了很多(如果不是全部)重复的部件周边和轮廓可扫描处理时间。
118.心轴工位130-2进一步包括接收器134-2,该接收器134-2从心轴工位130的发射器134-1接收协调信息。心轴工位130包括转位键136和具体是互补键310,其与心轴转位特征114(例如凹痕114-1、突起114-2、脊114-3、凹槽114-4、凹口114-5、通孔114-6、盲孔114-7)互补地配合,以将特征创建器132相对于心轴110锁定就位。互补键310与凹痕114-1、突起114-2、脊114-3、凹槽114-4、凹口114-5、通孔114-6、盲孔114-7的互补配合传达来自心轴110的关于转位特征126的放置和类型的消息。心轴工位130经由发射器134-1将消息传输到接收器134-2,该消息通过互补键310与心轴转位特征114的配合而传送,并生效,以将转位特征126、126-1到126-8和b126、b126-1到b126-8定位和安装到制造余量部128中或定位和安装到制造余量部128上。在一个实施方式中,心轴工位130-1包括叶片137(诸如往复叶片或圆形叶片),和/或铣刀和/或钻头以及控制器150,其驱动叶片137在心轴110处修整、铣削或钻孔制造余量部128的部分,以安装转位特征126、126-1至126-7。在将复合部件120从心轴110脱模之前,在制造余量部128中执行该修整、铣削或钻孔操作,并且留下转位特征126、定位特征126-1、钻孔起始位置126-2、钻通孔位置126-3、狭槽126-4、安装销126-5,以供组装线102、102-1中的工位160使用。rfid标签126-6和条形码126-7也由心轴工位130放置。rfid标签114-8和条形码114-9由rfid标签和/或条形码放置器329放置。
119.一种具有切割器的柔性轨道类型的装置,所述切割器可移动地附接到两个轨道,该两个轨道可移除地附接到复合部件120,诸如半筒段113。轨道354被示出为可移除地附接到复合部件120,诸如半筒段113和心轴110。轨道354被真空联接或通过一些其他可移除的方式附接到复合部件120。壳体138-1横跨在轨道354之间并且通过辊系统353沿着轨道354传输,和/或还将轨道354联接到壳体138-1。切割器133-1具有在横向方向135上行进到特征创建器132-1的横向安装件133-9。切割器133-1包括刀片137,刀片137是往复刀片或圆形刀片或铣刀型切割刀片,以分别分离毛刺边缘124、124-9并产生支承边缘123或边缘129-1。当相对于轨道354在横向方向上定位转位特征126时,在切割器133-3的横向方向135上行进的横向安装件133-9开始起作用。这可以通过使用相同的切割器133-1将转位特征126安装到距支承边缘123不同距离处的制造余量部128中来实现。辊系统353的实施方式在特征创建
器132-1与轨道354之间具有齿条齿轮连接。
120.参见图1a、图1b和图3b,心轴工位130-2包括切割器133-2,切割器133-2具有刀片137,诸如刀片、钻头、铣刀,以产生与制造边缘122-1和支承边缘123分离的制造余量124-1。切割操作通常在将复合部件120从心轴110脱模之前执行,并且留下足够量的制造余量部122-1以包括用于由组装线102中的工位160使用的转位特征126。修整还产生用于通过组装线102上的工位160在轨道140上传输复合部件120的支承边缘123。在脱模之前进行修整节省了将复合部件120(诸如半筒段113)放置到仅专用于修整的单元中并转位到该单元并且在修整到最终修整部148之前转位到边缘129-1、最终修整部148、148-2、修整线122-8并且然后在重复的部件周边和轮廓可扫描处理中将复合结构120转位到各个连续的单元的非增值时间。当在整个组装过程中移动时,使用制造余量部128来传送转位特征126节省了很多(如果不是全部)转位到各个单元所需的重复的部件周边和轮廓可扫描处理时间。
121.凹槽352用于引导和实现切割器133-2相对于制造余量部122-1的纵向101-1传输,其中支撑件355-1可滑动地将其与辊系统350-1接合。一种形式(version)的心轴工位130-2、130-8被悬臂安装到凹槽352中。心轴工位130-2沿着凹槽352被引导,以便于产生与制造余量部122分离的毛刺边缘124-1。切割器133-2从凹槽352悬臂伸出,其中一个或更多个辊系统350可滑动地接合切割器133-2并沿着心轴110推进切割器133-2。凹槽352被例示出为具有矩形横截面,但是其他横截面也是可能的。凹槽352还在产生支承边缘123期间提供切割器133-2的引导。在另一种形式中,轨道354以及凹槽352用于使得切割器133-2能够相对于制造余量部122-1纵向101-1传输。在又一种形式中,轨道354而不是凹槽352用于实现纵向101-1移动。
122.这意味着轮350能够相对于心轴110沿着凹槽352相对于支承边缘123和从心轴110的一端到另一端的修剪线122-8进行纵向运动。一种形式具有以齿条齿轮布置与轮350接合的凹槽352,所述齿条齿轮布置还可用于传送相对于心轴110的位置数据和/或相对于心轴110推进心轴工位130-2。因此,在一个实施方式中,心轴工位130-2沿着心轴110处的一个或更多个凹槽352。在另一实施方式中,如图所示,特征创建器132-2的一端141经由辊系统353和轨道354联接到复合部件120,作为柔性轨道类型的装置的一部分,并且特征创建器132-2的另一端141-1经由支撑件355和辊系统350-1联接到凹槽352。在又一实施方式中,如图所示,特征创建器132-2的一端141经由辊系统353和轨道354联接到复合部件120、120-1,作为柔性轨道类型的装置的一部分,并且特征创建器132-2的另一端141-1经由辊系统353和轨道354、354联接到心轴110,作为柔性轨道类型的装置的一部分,而不使用到凹槽352的连接。在又一实施方式中,如图所示,特征创建器132-2的一端141经由辊系统353和轨道354联接到复合部件120,作为柔性轨道类型的装置的一部分,并且特征创建器132-2的另一端141-1经由辊系统353和轨道354联接到心轴110,作为柔性轨道类型的装置的一部分,并且特征创建器132-2的另一端141-1经由支撑件355和辊系统350-1联接到凹槽352。
123.一种具有切割器的柔性轨道类型的装置,所述切割器可移动地附接到两个轨道,该两个轨道可移除地附接到复合部件120,诸如半筒段113。轨道354被示出为可移除地附接到复合部件120和心轴110。轨道354被真空联接或通过一些其他可移除的方式附接到复合部件120和/或心轴110。切割器壳体138-2横跨在轨道354之间并且通过辊系统353沿着轨道354传输,和/或还将轨道354联接到壳体138-2。切割器133-1具有在横向方向135上行进到
特征创建器132-2的横向安装件133-9。切割器133-2包括刀片137,该刀片137是往复刀片或圆形刀片或铣刀型切割刀片,以分离制造余量部124并产生支承边缘123。当相对于轨道354在横向方向上定位转位特征126时,在切割器133-2的横向方向135上行进的横向安装件133-9在特征创建器132-2内起作用。这可以通过使用相同的切割器133-2来产生支承边缘123来实现。辊系统353的一个实施方式在特征创建器132-2与轨道354之间具有齿条齿轮连接。凹槽352用于相对于支承边缘123引导切割器133-2,并且用于相对于制造余量部122-1、128传输切割器133-3,其中支撑件355-1可滑动地将其与辊系统350-1接合。该实施方式是悬臂安装到凹槽352-1中并沿着凹槽352-1被引导,以便于在制造余量部122内形成支承边缘123。切割器133-2从凹槽352悬臂伸出,其中一个或更多个辊系统350可滑动地接合切割器133-2并沿着心轴110自主地或手动地推进切割器133-2。
124.在另一实施方式中,凹槽352-1用于相对于支承边缘123引导切割器133-2,其中支承件355可滑动地将其与辊系统350-1接合。该实施方式不使用轨道354和辊系统353,而是悬臂安装到凹槽352中并且沿着凹槽352-1被引导以便于切割支承边缘123。特征创建器132-2和切割器133-2从凹槽352-1悬臂伸出,其中一个或更多个辊系统350-1沿着心轴110可滑动地接合和推进特征创建器132-2和切割器133-2,以便于产生支承边缘123。这可导致比最终修整更粗糙的切割,并且在将支承边缘123修整到最终修整部148之前,为复合部件120提供一致的支承边缘123以供在制造过程期间使用。
125.参见图1a、图1b和图3c,心轴工位130-3和心轴工位130-5、130-7包括切割器133-3、133-6、133-8,该切割器133-3、133-6、133-8具有刀片137,诸如刀片、钻头和/或铣刀,以分别产生与制造边缘127-1、修整线122-8离开边缘127、129-1分离的制造余量部127-2、124-8。通常在将复合部件120从心轴110脱模之前执行切割操作,并且在通过组装线102、102-1中的工位160、160-1进行处理之前产生最终修整边缘127或边缘129-1。在脱模之前进行修整节省了将复合部件120、120-1放置到仅专用于修整的单元中并转位到该单元并且在修整到最终修整部148、148-2之前转位到边缘129-1、最终修整部148、148-2、修整线122-8并且然后在开始在单元中作业之前在重复的部件周边和轮廓可扫描处理中将复合结构120转位到各个连续的单元的非增值时间。当在整个组装过程中移动时,使用制造余量部122-1、122-9来传送转位特征126、b126节省了很多(如果不是全部)转位到各个单元所需的重复的部件周边和轮廓可扫描处理时间。
126.心轴工位130-5和心轴工位130-7对应于心轴工位130-3并且以类似于毛刺边缘124的方式修整毛刺边缘124-9。在一些形式中,心轴工位130-5、130-7可由心轴工位130-3取代,这取决于凹槽b352和/或轨道b354的位置或该位置的缺失。心轴工位130-5的尺寸被设计成便于将壳体138放置在大致直接位于轨道b354上方的中间点138-1处,以帮助相对于一个凹槽b352平衡心轴工位130-5。同样地,心轴工位130-7的尺寸被设计成便于将壳体138放置在大致直接位于凹槽b352上方的中间点138-1处,以帮助平衡位于一个凹槽b352上方的心轴工位130-5。在脱模之前进行修整节省了将复合部件120、120-1(诸如半筒段113和/或翼板113-1)放置到仅专用于修整的单元中并转位到该单元并且在修整到最终修整部148、148-2之前转位到边缘129-1、最终修整部148、148-2、修整线122-8并且然后在重复的部件周边和轮廓可扫描处理中将复合结构120、120-1转位到各个连续的单元的非增值时间。当在整个组装过程中移动时,使用制造余量部122-1、122-9来传送转位特征126、b126节
省了很多(如果不是全部)转位到各个单元所需的重复的部件周边和轮廓可扫描处理时间。
127.凹槽352-1、b352用于引导和实现切割器133-2相对于最终修整边缘127的纵向101-1传输,其中支撑件355-1可滑动地将其与辊系统350-1接合。凹槽b352用于引导和实现切割器133-6、133-8相对于边缘129-1的传输,其中支撑件355-1可滑动地将其与辊系统350-1接合。凹槽352、b352被例示为具有矩形横截面,但是其他横截面也是可能的。心轴工位130-3、130-7安装到凹槽352-1、b352中,并且沿着凹槽352-1、b352引导,以便于产生与复合部件120、120-1分离的制造余量部127-2或分离的毛刺边缘124-8。切割器133-3、133-6、133-8具有一个或更多个辊系统350,该一个或更多个辊系统350可滑动地接合切割器133-3并沿着心轴110推进切割器133-3。凹槽352-1、b352还分别在产生支承边缘123或边缘129-1期间提供切割器133-3、133-6、133-8的引导。这意味着轮350使得能够相对于心轴110、110-1沿着凹槽352-1、b352相对于边缘127-1、修整线122-8移动,从而从心轴110、110-1的一端到另一端留下最终修整边缘127或边缘129-1。一个实施方式具有以齿条齿轮布置与轮350接合的凹槽352-1、b352,所述齿条齿轮布置还可用于传送相对于心轴110的位置数据和/或相对于心轴110、110-1推进心轴工位130-3、130-5、130-7。因此,在一个实施方式中,心轴工位130-3、130-5、130-7沿着心轴110、110-1处的一个或更多个凹槽352-1、b352。在另一实施方式中,如所示的,特征创建器132-3的一端141经由辊系统353和轨道354联接到复合部件120,作为柔性轨道类型的装置的一部分,并且特征创建器132-3的另一端141-1经由支撑件355和辊系统350-1联接到凹槽352-1。在又一实施方式中,如所示的,特征创建器132-3的一端141经由辊系统353和轨道354联接到复合部件120,作为柔性轨道类型的装置的一部分,并且特征创建器132-3的另一端141-1经由支撑件355和350-1联接到凹槽352-1、b352。未例示出的另一实施方式使特征创建器132-3的一端141经由辊系统353和轨道354联接到复合部件120、120-1,作为柔性轨道类型的装置的一部分,并且特征创建器132-3的另一端141-1经由辊系统353和轨道354联接到心轴110,作为柔性轨道类型的装置的一部分,而不使用到凹槽352-1、b352的连接。在又一实施方式中,如所示的,特征创建器132-3的一端141经由辊系统353和轨道354联接到复合部件120,作为柔性轨道类型的装置的一部分,并且特征创建器132-3的另一端141-1经由辊系统353和轨道354联接到心轴110、110-1,作为柔性轨道类型的装置的一部分,并且特征创建器132-3的另一端141-1经由支撑件355和辊系统350-1联接到凹槽352-1、b352。
128.柔性轨道类型的装置例如但不限于心轴工位130-1、130-4,柔性轨道类型的装置具有切割器,该切割器可移动地附接到两个轨道,该两个轨道可移除地附接到复合部件120、120-1,例如半筒段113。轨道354被示出为可移除地附接到复合部件120、120-1,诸如半筒段113和/或翼板113-1和心轴110、110-1。轨道354、b354、b354-1被真空联接或通过一些其他可移除的方式附接到复合部件120、120-1和/或心轴110、110-1。切割器壳体138-1横跨在轨道354、b354-1与凹槽352-1、b352之间,并且分别通过辊系统353和辊350-1沿着轨道354、b354-1和凹槽352-1、b352传输切割器壳体138-1。切割器133-3具有在横向方向135上行进到特征创建器132-3的横向安装件133-9。切割器133-3包括刀片137,刀片137是往复刀片或圆形刀片或铣刀型切割刀片,以分离制造余量部127-2和最终修整边缘127或边缘129-1。辊系统353的实施方式在特征创建器132-3与轨道354、b354-1之间具有齿条齿轮连接。
129.参见图1a、图1b和图3d,心轴工位130-4包括切割器133-4,切割器133-4具有刀片
137,诸如刀片、钻头、铣刀,以产生与制造边缘127-1分离的制造余量部127-2,从而留下最终修整边缘127。通常在将复合部件120从心轴110脱模之前执行切割操作,并且在通过组装线102、102-1中的工位160进行处理之前产生最终修整边缘127。在脱模之前进行修整节省了将复合部件120(例如,半筒段113)放置到仅专用于修整的单元中并转位到该单元并且在修整到最终修整部148、148-2之前转位到边缘129-1或最终修整部148、148-2或修整线122-8并且然后在重复的部件周边和轮廓可扫描处理中将复合结构120、120-1转位到各个连续的单元的非增值时间。当在整个组装过程中移动时,使用制造余量部122-1、122-9来传送转位特征126、b126节省了很多(如果不是全部)转位到各个单元所需的重复的部件周边和轮廓可扫描处理时间。
130.虽然在一些实施方式中使用凹槽352-1来引导和实现切割器133-3相对于最终修整边缘127的纵向101-1传输,其中支撑件355-1可滑动地将其与辊系统350-1接合,但是在该实施方式中未例示出。
131.在所例示的实施方式中,如所示的,特征创建器132-4的一端141联接到刀片137,而特征创建器132-4的中跨(mid-span)141-2经由辊系统353和轨道354联接到复合部件120,作为柔性轨道类型的装置的一部分,并且特征创建器132-4的另一端141-1经由辊系统353和轨道354联接到心轴110,作为柔性轨道类型的装置的一部分,而不使用到凹槽352-1的连接。叶片137相对于轨道354在复合部件120上悬臂式伸出。控制器150相对于最终修整边缘127引导叶片137以产生单独的制造边缘127-2。
132.一种具有切割器的柔性轨道类型的装置(心轴工位130-1),所述切割器可移动地附接到两个轨道,该两个轨道可移除地附接到复合部件120,例如半筒段113。轨道354被示出为可移除地附接到复合部件120,诸如半筒段113和心轴110。轨道354被真空联接或通过一些其他可移除的方式附接到复合部件120和/或心轴110。切割器壳体138-1横跨在轨道354与凹槽352-1之间,并且分别通过辊系统353和辊350-1沿着轨道354和凹槽352-1传输。切割器133-4具有在横向方向135上行进到特征创建器132-4的横向安装件133-9。切割器133-4包括刀片137,刀片137是往复刀片或圆形刀片或铣刀型切割刀片,以分离制造余量部127-2和最终修整边缘127。辊系统353的一个实施方式在切割器特征创建器132-4与轨道354之间具有齿条齿轮连接。柔性轨道类型的装置被实施为心轴工位130-1、130-2、130-3、130-4、130-6、130-8。
133.心轴工位130、130-1、130-2、130-3、130-4和心轴110能够与凹槽352、352-1或轨道354或两者的组合联接,如图1、图3、图3a、图3b、图3c、图3d所例示。如所例示的,心轴工位130、130-1、130-2、130-3、130-4和心轴110覆盖若干不同的方式以将它们联接在一起。若干联接方法中的一种或更多种可用于切割器133、133-1、133-2、133-3、133-4的实施方式。因此,类似于切割器133、133-3,133-4通过凹槽352、352-1可联接到心轴110。类似地,心轴工位130、130-1、130-2、130-3、130-4与心轴110的联接方法能够在切割器133、133-1、133-2、133-3、133-4上使用。
134.控制器150管理心轴工位130、130-1、130-2、130-3、130-4的操作。在该实施方式中,控制器150包括用于与心轴工位130、130-1、130-2、130-3、130-4通信的接口,诸如以太网接口、通用串行总线(usb)接口、无线接口等,并且包括存储用于操作心轴工位130、130-1、130-2、130-3、130-4的一个或更多个数字控制(nc)程序的存储器。控制器150可以进一步
处理来自心轴工位130的反馈,并且基于这样的反馈来提供指令。控制器150可以被实现为例如定制电路、执行编程指令的硬件处理器或其某种组合。
135.轨道140在处理方向101上引导心轴110,并且可以包括辊146、轨道或促进心轴110的移动的其他部件。在一个实施方式中,轨道140包括一系列离散的支柱,该一系列离散的支柱在处理方向101上分开,并且辊安装到该一系列离散的支柱。在一个实施方式中,轨道140包括用于移动心轴110的驱动器142(例如,链驱动器或其他构件),而在另外的实施方式中,自主引导车辆(agv)(未示出)用于移动心轴110。在一个实施方式中,轨道140还用于在复合部件120已经从心轴110脱模之后移动复合部件120,而图1使承载的复合部件120在轨道144上进入装配线102、102-1。特征创建器132由轨道140承载,或由另一轨道或凹槽系统承载。
136.在安装了转位特征126、b126之后,复合部件120、120-1可被脱模、放置到轨道144上,并且在处理方向101、101-9上移动到下游工位160、160-1,而心轴110、110-1返回到清洁和/或修复工位。例如,心轴110、110-1可以被发送到脉动线或专用工位,诸如组装线102、102-1和工位160、160-1,在那里,心轴110、110-1被处理以供重复使用,并且灌封凹部322是心轴110、110-1内的凹部,该凹部填充有灌封化合物并且在再使用之前被精加工为心轴110、110-1表面轮廓313,以接收用于硬化为复合部件120、120-1的另一个层压件。下游工位160、160-1利用脱模复合部件120、120-1中的转位特征126、b126,以便在执行诸如ndi、钻孔、安装紧固件、安装框架、切掉窗或门、安装窗框或门框等作业之前将下游工位160、160-1转位到复合部件120、120-1。在另外的实施方式中,多个下游工位160、160-1沿着用于承载已脱模的复合部件120、120-1的轨道144放置,并且多种类型的转位特征126、b126(例如,具有不同的形状、尺寸和/或间距)安装在复合部件120、120-1处。在这样的实施方式中,下游工位160、160-1中的不同工位可以在复合部件120、120-1处利用不同类型的转位特征126、b126。
137.在一个实施方式中,在硬化复合部件120之前产生转位特征126、b126。在这样的实施方式中,复合部件120作为预成型件189、189-1铺设到心轴110的铺设表面112上。为了在硬化之前应用转位特征,心轴110上的转位轮廓特征125是分别填充有树脂和增强纤维或以其他方式成形树脂和增强纤维的凹部、凹痕、凹坑、隆起或脊,从而在硬化之前将转位特征126-8、b126-8赋予制造余量部122、128、122-9,通过硬化过程使其永久化。
138.再次参考图1a、图1b,还设想了不包括转位特征126、b126的形式。该形式具有支承边缘123和/或边缘129-1。另一形式具有分别沿着最终修整部148、148-2与支承边缘123或边缘129-1之间的一个制造余量部122-1、122-9的转位特征126、b126。
139.将关于图2a讨论制造环境100、100-1的操作的例示性细节。对于该实施方式,假设心轴110、110-1已经接收层压件,并且已经施加热和压力以硬化心轴110、110-1上的层压件,以便形成复合部件120、120-1。
140.图2a是例示出在例示性实施方式中用于将转位特征126、126-1至126-7和b126、b126-1至b126-7应用于复合部件120、120-1的方法的流程图。参考图1的制造环境100、100-1来描述方法200的步骤,但是本领域技术人员将理解,方法200可以在其他系统中执行。本文描述的流程图的步骤不是全部包含性的,并且可以包括未示出的其他步骤。本文描述的步骤也可以以替代的顺序执行。
141.步骤202包括接收已放置有复合部件120、120-1的心轴110、110-1,例如,心轴110、110-1可以包括成型叠层心轴,复合部件120、120-1已经硬化到该成型叠层心轴上。心轴110、110-1可以在复合部件120、120-1的制造和/或组装期间在处理方向上连续地移动或脉动,或者可以在从高压釜(autoclave)移除之后保持静止。接收心轴110、110-1的步骤包括将心轴110、110-1放置在其可由心轴工位130、130-1至130-8转位的位置处。
142.在步骤204中,将心轴工位130、130-1至130-8转位到119、119-1心轴110、110-1。这可以通过将转位键136放置到心轴110、110-1处的心轴转位特征114、b114中的一个或更多个中来执行,以便精确地实施心轴110、110与心轴工位130、130-1至130-8之间的位置关系/偏离。因为心轴工位130、130-6、130-8相对于心轴110、110-1的位置在与心轴转位特征114、b114联接时是精确已知的,所以心轴工位130、130-6、130-8可以被操作以根据需要安装转位特征126、b126。在一个实施方式中,心轴110、110-1包括便于切穿复合部件120的凹部或孔。这些凹部可以填充有灌封化合物。在这样的实施方式中,灌封化合物允许用于铺设和固化的光滑工具表面,同时还允许工具切穿复合部件120的内模线和心轴110的外模线/工具表面。在另外的实施方式中,扫描仪或成像系统(例如,相机、激光器、超声波传感器等)用于转位到心轴110。此外,心轴110上的转位轮廓特征125是凹部、凹痕、凹坑、隆起或脊,它们分别填充有树脂和增强纤维或以其他方式成形树脂和增强纤维,从而在硬化之前将转位特征126-8、b126-8赋予制造余量部122-1、122-9、128,通过硬化过程使其永久化。
143.在步骤206中,操作心轴工位130、130-6、130-8以将部件转位特征126、b126安装到复合部件120的制造余量部122-1、128中。转位特征126、b126偏离心轴110处的心轴转位特征114。安装转位特征126、b126可以包括切割、钻孔或以其他方式从复合部件120、120-1移除材料和/或将材料添加到复合部件120、120-1上。在另外的实施方式中,安装转位特征126、b126包括铣削或机加工在铺设期间形成的复合部件120、120-1的一部分。也就是说,安装转位特征126包括在复合部件120中加工铺设特征。例如,这包括添加杯定位特征126-1、b126-1用于杯和锥体布置、钻孔起始位置126-2、b126-2、钻通孔位置126-3、b126-3、狭槽126-4、b126-4、安装销126-5、b126-5、rfid标签126-6、b126-6和条形码126-7、b126-7。在转位特征126、b126是放置到复合部件120中的销的实施方式中,安装转位特征126可包括销安装器327(图3)驱动销126-5、b126-5穿过复合部件120、120-1中的孔。在一个实施方式中,心轴110从高压釜移除,分离的毛刺边缘124-1、124-8从复合部件120、120-1产生,以露出支承边缘123和边缘129-1。切割器133-3、133-4、133-5和133-6具有刀片137,例如刀片、钻头、铣刀,以产生与制造边缘127-1、124-9分离的制造余量部127-2和/或分离的毛刺边缘124-8,从而分别在心轴110、110-1的一个或更多个端部上留下边缘127、129-1。
144.步骤206可以重复多次(例如,每心轴转位特征114、b114一次)。每一次心轴工位130、130-6、130-8都相对于心轴110、110-1从心轴转位特征114、b114前进以分别放置待安装到复合部件120、120-1的制造余量部122-1、128、122-9的多个转位特征126、b126。当从心轴转位特征114、114-1至114-9和b114、b114-1至b114-9前进到下一个心轴转位特征114、114-1至114-9和b114、b114-1至b114-9并且安装链接到心轴转位特征114的各个连续转位特征126、b126时,心轴工位130、130-6、130-8在处理方向101、101-9中的任一者上前进。当复合部件120、120-1分别在处理方向101、101-9上前进时,转位特征126由工位160、160-1使用。
145.在步骤207中,操作心轴工位130-2至130-8以修整复合部件120、120-1,以在复合部件120、120-1仍位于心轴110、110-1上时使用心轴110、110-1传送的信息移除制造余量部。
146.在步骤208中,复合部件120从心轴110脱模。这可以包括将复合部件120、120-1从心轴110、110-1提升、弯曲或以其他方式分离。复合部件120、120-1然后前进到组装线102、102-1以用于进一步制造和组装,而心轴110、110-1返回以用于清洁、修复和接收另一复合部件120、120-1的预成型件189、189-1。在一个实施方式中,心轴110也被再加工(例如,用灌封材料再填充、修理等),并且传输到铺设开始位置。在一个实施方式中,复合部件120、120-1放置在轨道144、144-1上,用于传输到下游工位160、160-1。轨道144、144-1可以包括在期望位置处的轨道或支柱,以便将期望的曲率/轮廓(例如,形状和倾角)施加到复合部件120、120-1上。轨道144可以包括在承载支承边缘123的位置处的轨道或支柱,以便将期望的曲率/轮廓(例如,形状和倾角)施加到复合部件120上,特别是半筒段113上。
147.所述方法然后继续,例如,复合部件120、120-1经由转位特征126、b126在组装线102、102-1中被转位到工位160、160-1或穿梭机,特别是具有翼板113-1的复合部件120、120-1,并且可以在复合部件120、120-1被转位到一个或更多个工位160、160-1的同时由工位160、160-1中的一个或更多个在复合部件120、160-1上执行作业。再次,可以由一个或更多个工位160、160-1单个地或多个同时执行作业。
148.在步骤210中,复合部件120、120-1例如通过在轨道144、144-1处操作驱动系统或者通过沿着轨道144、144-1拉动复合部件120、120-1而沿处理方向101、101-9推进。这可以在从心轴110、110-1脱模之后以微脉动、脉动或连续的方式执行。
149.在步骤212中,复合部件120、120-1经由安装在复合部件120、120-1上的转位特征126、b126被转位到下游工位160、160-1(或任何工位或同时转位到多个工位,包括上游工位或相邻工位)。例如,下游工位160、160-1可以与转位特征126、b126联接(例如,压入到转位特征126、b126中)以确定转位特征126、b126的位置。然后,下游工位160、160-1可以基于转位特征126、b126的位置来调整其位置,以便考虑与预期位置/定向的任何偏差。根据本文描述的转位的方法,各个下游工位160、160-1取决于用于对准和放置正在安装的部件的定位精度要求。
150.方法200提供了优于现有技术和系统的技术益处,因为它使得转位特征能够应用于复合部件120、120-1,同时它仍然与精确制造的复合部件120、120-1以及精确定位和成形的心轴110、110-1联接并且利用其优势。这意味着转位特征126、b126被添加到复合部件120、120-1而不需要重新转位复合部件120、120-1,因为在从心轴110、110-1脱模之前,心轴110、110-1的精确特性是已知的并且被利用到复合部件120、120-1上。因此,在脱模之后,复合部件120不需要作为每个工位160、160-1的转位协议的一部分被探测、扫描或以其他方式检查,以便在安装转位特征之前表征其结构和/或3d配置。也就是说,通过参考已经安装在心轴处的转位特征,这些转位特征中的每一个的安装位置是精确已知的。转位特征还分别传达关于各个工位160、160-1的范围115、115-1内的复合结构的精确3d配置表征。这通过不需要使复合部件120、120-1经受扫描以确定在现有技术中需要的在115、115-1或各个工位160、160-1的范围内的结构的3d配置表征而节省了时间。现有技术类型的转位系统的复杂性和重复耗时的特质由于需要在各个微脉动121之后可扫描地转位到范围115、115-1内的
用于复合部件120的各个工位160、160-1、120-1、115-1而被放大。此外,由于心轴110、110-1分别用于制造多个复合部件120、120-1,因此在将心轴转位特征114、b114施加到心轴110、110-1中几乎不涉及额外的劳动和时间,心轴110、110-1引导用于复合部件120、120-1的转位特征126、b126的安装。心轴110、110-1在复合材料制造之前作为初始工艺制造。此外,因为制造余量部122-1、128、122-9保留在复合部件120、120-1处,所以它将其制造指令以及在115、115-1或各个工位160、160-1的范围内的结构的3d配置表征(诸如内模线轮廓和/或外模线轮廓)传送到各个后续工位160、160-1。
151.图2b是例示出了在例示性实施方式中用于处理复合部件120、120-1的方法250的流程图。步骤252包括接收复合部件120、120-1已经被放置到其上的心轴110、110-1,并且可以以与上面的步骤202类似的方式执行步骤252。步骤254包括基于位于心轴110、110-1上的心轴转位特征114、b114,在将复合部件120、120-1从心轴110、110-1脱模之后,通过硬化工艺处理复合部件120、120-1,并且使复合部件120、120-1进入组装线102、102-1中。这可以包括将转位特征126、b126安装到复合部件120、120-1中,修整复合部件120、120-1,或者在复合部件保持模制到心轴时执行任何合适的动作。
152.图12是在例示性实施方式中安装在复合部件800处的各种转位特征126、b126的侧视图。这些转位特征126、b126中的任何一个或组合可以在给定的复合部件(例如,半筒机身段)处实现。转位特征126、b126可以放置在制造余量部802中,并且这些转位特征126、b126在脱模之前的后固化过程期间被安装。最终,当不再需要制造余量部802用于转位时,修整掉制造余量部802(例如,在将半筒机身段紧固到另一个半筒段以形成完整筒段之前,其中将下半筒段接合到上半筒段)。图4至图11是各种转位特征126、b126的视图。图4是复合部件120和杯410的横截面图,杯410为一种类型的定位特征126,但也可应用于具有定位特征b126的复合部件120-1。杯410是用于在复合部件120、120-1分别与工位160、160-1的转位配合期间联接到工位160和/或工位160-1的锥体420的接收器。杯410具有如所例示的形成穿过复合部件120、120-1的通道的形式。另一形式具有不完全穿过复合部件120、120-1的杯410。当转位发生时,杯410和锥体420分别形成锥形凹凸连接。
153.图5是钻孔起始部510、转位特征126、b126中的一个的横截面图。图5例示出了复合部件120和钻头起始部510的横截面图,其是一种类型的定位特征126,但也可以应用于具有定位特征b126的复合部件120-1。钻孔起始部510是用于配合联接器520(诸如粗短(stubby)销521)的接收器。钻孔起始部510是进入复合部件120、120-1的非通孔。当转位发生在复合部件120、120-1到工位160、160-1的转位配合期间时,钻孔起始部510和配合联接器520分别形成凹凸连接。
154.图6是钻通孔(drill through)610、转位特征126、b126中的一个的横截面图。图6例示出了复合部件120和钻通孔510的横截面图,该钻通孔510是一种类型的定位特征126,但是也可以应用于具有转位特征b126的复合部件120-1。钻通孔610是用于在复合部件120、120-1到工位160、160-1的转位配合期间联接到工位160、160-1的销620的接收器。钻通孔610具有形成穿过复合部件120、120-1的通道的形式。当转位发生时,钻通孔610和销620分别形成凹凸连接。销620在转位配合期间填充钻通孔610的至少一部分。
155.图7是狭槽126-4、b126-4、转位特征126、b126中的一个的横截面图。狭槽710对应于126-4、b126-4,是用于在复合部件120、120-1到工位160、160-1的转位配合期间联接到工
位160、160-1的狭槽接合器720的接收器。如所例示的,狭槽710具有形成复合部件120、120-1的非贯通部分的形式。未例示出的另一形式具有穿过复合部件120、120-1的狭槽。当转位发生时,狭槽710和狭槽接合器720分别形成凹凸连接。在一种形式中,槽接合器720在转位配合期间进入复合部件120、120-1。
156.图8是钻通孔851的横截面图,其中销831安装在钻通孔851中,并且钻通孔851是转位特征126、b126中的一个。图8例示出了复合部件120和销831的横截面图,但也可应用于具有转位特征b126的复合部件120-1。销831是用于在复合部件120、120-1到工位160、160-1的转位配合期间联接到工位160、160-1的销连接器841的接收器。当发生转位时,销831和销连接器841分别形成凹凸连接。销620在转位配合期间填充钻通孔610的至少一部分。
157.图9是射频识别(rfid)芯片910的横截面图,并且射频识别(rfid)芯片910是转位特征126、b126中的一个。图9例示出了复合部件120和rfid芯片910的截面图,但是也可以应用于具有转位特征b126的复合部件120-1。射频识别(rfid)读取器920是用于rfid芯片910传送信息的接收器。rfid读取器920在复合部件120、120-1到工位160、160-1的转位配合期间联接到工位160、160-1。
158.图10是条形码1010的横截面图,并且条形码1010是转位特征126、b126中的一个。图10示出了复合部件120和条形码1010的横截面图,但是也可以应用于具有转位特征b126的复合部件120-1。条形码读取器1020是用于条形码1010传送信息的接收器。条形码读取器1020在复合部件120、120-1到工位160、160-1的转位配合期间联接到工位160、160-1。
159.图11是凹口1110、转位特征126、b126中的一个的横截面图。从复合部件800的支承边缘123机加工出的任何合适形状(例如梯形、正方形、三角形、垂直孔等)的凹口1110终止,留下如图11所示的背衬1100。凹口1110是用于在复合部件120、120-1到工位160、160-1的转位配合期间联接到工位160、160-1的凹口接合器1120的接收器。凹口1110具有如所例示的形成复合部件120、120-1的非贯通部分的形式。未例示出的另一形式具有穿过复合部件120、120-1的凹口1110。当转位发生时,凹口1110和凹口接合器1120分别形成凹凸连接。在一种方式中,凹口接合器1120在转位配合期间进入复合部件120、120-1。
160.因此,这些不同的转位特征126、b126中的每一个可以用于促进在各个工位160、160-1处的转位或其他操作。例如,一些工位160、160-1可以使用一种类型的特征(例如,便于结构相对于工位160、160-1的放置的盲孔),而其他工位160、160-1可以使用另一种类型的特征(例如,便于抓握部件的销)。使用凸形特征(例如,销)和/或凹形特征(例如,孔)的可能性意味着低轮廓工位160、160-1(例如,ndi检查工位)可以与复合部件120、120-1的凹形转位特征126、b126相互作用而不遇到物理干扰,这些都是可以实现以便以期望的方式实现转位配合的许多几何形状中的一些的所有示例。此外,转位特征126、b126(和/或工位160、160-1处的对应接收器)的形状可以成形为将复合部件120、120-1约束到期望位置,而不过度约束复合部件120、120-1。例如,狭槽710是转位特征126、b126的示例,它可以约束垂直运动同时实现在处理方向101、101-9上的运动,而销、凹口、狭槽或孔可以约束处理方向101、101-9以及垂直方向两者上的运动。
161.在进一步的实施方式中,本文描述的特征可以安装到复合部件120、120-1的任何合适的部分(例如,门切口区域或窗切口区域)中,或者转位特征126、b126甚至可以通过在层压件硬化之前将销、囊状物或其他工具放置到复合部件120、120-1的层压件上而在铺设
期间应用于复合部件120、120-1。
162.图13和图14是在例示性实施方式中转位119、119-1到安装到复合部件1430上的转位特征1432的下游工位1400的视图。转位特征1432和复合部件1430分别对应于转位特征126、b126和复合部件120、120-1。在该实施方式中,工位1400的框架1410处的接收器1420接收从复合部件1430悬臂伸出的销1433的形式的转位特征1432。各个销1433接合接收器1420和/或由接收器1420接合,并将复合部件1430沿着处理方向101、101-9转位119、119-1和/或放置到期望位置。
163.在与图13的视图箭头15相对应的图14中,复合部件1430的半筒状是清晰可见的。此外,转位特征1432(即,销)在插座1420内更清晰可见。
164.示例
165.更具体地参考附图,可以在如图15所示的方法中的飞行器制造和服务和如图16所示的飞行器的上下文中描述本公开的实施方式。在预生产期间,方法1600可以包括飞行器1602的规格和设计1604以及材料采购1606。在生产期间,飞行器1602的构件和子组件制造1608和系统集成1610发生。此后,飞行器1602可以通过认证和交付1612以便置于服务中1614。当客户服务期间,飞行器1602被安排进行维护和服务1616中的日常工作(这还可能包括修改、重新配置、翻新等)。可以在方法1600和/或飞行器1602的任何合适的构件(例如,机架(airframe)1618、系统1620、内部1622、推进系统1624、电气系统1626、液压系统1628、环境1630)中描述的生产和服务的任何一个或更多个合适阶段(例如,规格和设计1604、材料采购1606、构件和子组件制造1608、系统集成1610、认证和交付1612、服务1614、维护和服务1616))期间采用本文所实施的装置和方法。
166.可由系统集成商、第三方和/或运营商(例如,客户)执行或进行方法500的各个过程。出于该描述的目的,系统集成商可非限制性地包括任何数量的飞行器制造商和主系统分包商;第三方可非限制性地包括任何数量的供货商、分包商和供应商;而运营商可以是航空公司、租赁公司、军事实体、服务机构等。
167.如图16所示,通过方法1600生产的飞行器1602可以包括具有多个系统1620以及内部1622的机架1618。系统1620的示例包括推进系统1624、电气系统1626、液压系统1628和环境系统1630中的一个或更多个。可以包括任意数量的其他系统。尽管示出了航空航天示例,但本发明的原理可以应用于其他行业,例如汽车行业。
168.如上文已经提到的,在方法1600中描述的生产和服务的任何一个或更多个阶段期间可以采用本文所实施的设备和方法。例如,对应于构件和子组件制造1608的构件或子组件可以以类似于在飞行器1602服务期间生产的构件或子组件的方式制造。此外,一个或多个设备实施方式、方法实施方式或其组合可以在子组件制造1608和系统集成1610期间使用,例如,通过显著加快飞行器1602的组装或降低飞行器1602的成本。类似地,一个或多个设备实施方式、方法实施方式或其组合可在飞行器1602服务期间使用,例如但不限于在维护和服务1616期间。因此,本发明可用于本文讨论的任何阶段(例如规格和设计1604、材料采购1606、构件和子组件制造1608、系统集成1610、认证和交付1612、服务1614、维护和服务1616),或其任何组合中,和/或飞行器1602的任何合适的构件(例如机架1618、系统1620、内部1622、推进系统1624、电气系统1626、液压系统1628和/或环境1630)。
169.在一个实施方式中,部件包括机架1618的一部分,并在构件和子组件制造1608期
间制造。然后所述部件可以在系统集成1610中组装到飞行器中,然后在服务1614中使用,直到磨损使该部件无法使用。然后,在维护和服务1616中,所述部件可以被丢弃并用新制造的部件替换。可以在整个构件和子组件制造1608中利用本发明的构件和方法以制造新部件。
170.图中示出或本文描述的各种控制元件(例如,电气组件或电子组件)中的任一个可以实现为硬件、实现软件的处理器、实现固件的处理器或这些的某种组合。例如,元件可以实现为专用硬件。专用硬件元件可以称为“处理器”、“控制器”或一些类似的术语。当由处理器提供时,功能可以由单个专用处理器、单个共享处理器或多个单独处理器提供,其中一些处理器可以是共享的。此外,术语“处理器”或“控制器”的明确使用不应被解释为专门指能够执行软件的硬件,并且可以隐含地包括但不限于数字信号处理器(dsp)硬件、网络处理器、专用集成电路(asic)或其他电路、现场可编程门阵列(fpga)、用于存储软件的只读存储器(rom)、随机存取存储器(ram)、非易失性存储器、逻辑或某些其他物理硬件构件或模块。
171.此外,控制元件可以被实现为可由处理器或计算机执行以执行元件的功能的指令。指令的一些示例是软件、程序代码和固件。指令在由处理器执行以指导处理器执行元件的功能时是可操作的。指令可以存储在处理器可读的存储装置上。存储装置的一些示例是数字或固态存储器、诸如磁盘和磁带之类的磁存储介质、硬盘驱动器或光学可读数字数据存储介质。
172.本公开还包括以下示例,不要与所附权利要求书相混淆,所附权利要求书确定保护范围:
173.1.一种制备用于组装的复合部件的方法,所述方法包括以下步骤:
[0174]-将具有制造余量部(122、122-9)的预成型件(189、189-1)放置在心轴(110、
[0175]
110-1)上;
[0176]-在仍位于心轴(110、110-1)上的同时将所述预成型件(189、189-1)硬化成具有硬化的制造余量部(122、122-9)的复合部件(120、120-1);以及
[0177]-在从心轴(110、110-1)脱模之前,将转位特征(126、b126)安装到预硬化和/或硬化后的制造余量部(122、122-9)中。
[0178]
2.根据示例1所述的方法,所述方法进一步包括以下步骤:
[0179]-将所述复合部件(120、120-1)从所述心轴(110、110-1)上脱模;
[0180]-沿处理方向(101、101-9)推进所述复合部件(120、120-1);以及
[0181]-经由安装到所述复合部件(120、120-1)中的转位特征(126、b126)将所述复合部件(120、120-1)转位到下游工位(160、160-1)。
[0182]
3.根据示例1或2所述的方法,所述方法进一步包括以下步骤:操作心轴工位(130至130-8)以在将所述复合部件(120、120-1)从所述心轴(110、110-1)脱模之前将转位特征(126、b126)安装到所述复合部件(120、120-1)的制造余量部(122、122-9)中。
[0183]
4.根据示例1至3中任一项所述的方法,所述方法进一步包括:在脱模之前将毛刺边缘(124-1、124-8)与所述复合部件(120、120-1)分离。
[0184]
5.根据示例1至4中任一项所述的方法,所述方法进一步包括:
[0185]
将所述心轴工位(130至130-8)转位(119、119-1)到所述心轴(110、110-1)处的心轴转位特征(114、b114)。
[0186]
6.根据示例1至5中任一项所述的方法,其中,安装到所述复合部件(120、120-1)的
所述制造余量部(122、122-9)中的所述转位特征(126、b126)偏离心轴转位特征(114、b114)。
[0187]
7.根据示例1至6中任一项所述的方法,其中,将所述心轴工位(130至130-8)转位(119、119-1)到所述心轴(110、110-1)处的心轴转位特征(114、b114)的步骤包括:将所述心轴工位(130至130-8)的互补键(310)插入到所述心轴(110、110-1)处的对应键槽(312)中。
[0188]
8.根据示例1至7中任一项所述的方法,其中,所述心轴工位(130至130-8)沿着所述心轴(110、110-1)处的凹槽(352)而行。
[0189]
9.根据示例1至8中任一项所述的方法,其中,所述心轴工位(130至130-8)沿着所述心轴(110、110-1)处的轨道(354)而行。
[0190]
10.根据示例1至9中任一项所述的方法,其中,操作所述心轴工位(130至130-8)以安装所述转位特征(126至126-8、b126至b126-8)的步骤包括使用钻孔、铣削或修整的减材制造或通过诸如添加销(126-5、b126-5)、添加rfid标签(126-6、b126-6)或添加条形码(126-7、b126-7)的增材制造。
[0191]
11.根据示例1至10中任一项所述的方法,其中,所述心轴工位(130至130-8)切穿所述复合部件(120、120-1)进入到所述心轴(110、110-1)的灌封凹部(322)中,以将所述转位特征(126至126-5、126-8、126-9、b126至b126-5、b126-8、b126-9)安装到复合部件(120、120-1)中。
[0192]
12.根据示例1至11中任一项所述的方法,其中,安装所述转位特征(126、b126)的步骤包括在所述复合部件(120、120-1)的所述心轴(110、110-1)处的所述支承边缘(123)、边缘(127)和/或边缘(129-1)中安装凹口(126-9、b126-9)。
[0193]
13.根据示例1至12中任一项所述的方法,其中,安装所述转位特征(126、b126)的步骤包括将所述转位特征(126、b126)安装在制造余量部(122、122-9)中,所述制造余量部(122、122-9)选自由所述复合部件(120、120-1)上的窗制造余量部(128)和/或门制造余量部(128-9)和天线切口区域组成的组。
[0194]
14.根据示例1至13中任一项所述的方法,其中,操作所述心轴工位(130至130-8)以安装所述转位特征(126、b126)的步骤包括安装多种类型的转位特征(126至126-9、b126至b126-9),其中,不同类型的转位特征(126至126-9、b126至b126-9)由不同的下游工位(160、160-1)使用。
[0195]
15.根据示例1至14中任一项所述的方法,其中,安装到所述复合部件(120、120-1)的所述制造余量部(122、122-9)中的所述转位特征(126、b126)选自由以下项组成的组:杯定位特征(126-1、b126-1)、钻孔起始位置(126-2、b126-2)、钻通孔位置(126-3、b126-3)、狭槽(126-4、b126-4)、安装销(126-5、b126-5)、rfid标签(126-6、b126-6)、条形码(126-7、b126-7)、形成的转位特征(126-8、b126-8)和凹口(126-9、b126-9)。
[0196]
16.根据示例1至15中任一项所述的方法,其中:
[0197]
所述转位特征(126、b126)使用选自由以下项组成的组的心轴转位特征(114、b114-9)安装到所述复合部件(120、120-1)的所述制造余量部(122、122-9)中:凹痕(114-1、b114-1)、突起(114-2、b114-2)、脊(114-3、b114-3)、凹槽(114-4、b114-4)、凹口(114-5、b114-5)、通孔(114-6、b114-6)、盲孔(114-7、b114-7)、rfid标签(114-8、b114-8)和条形码(114-9、b114-9)。
[0198]
17.一种根据示例1至16中任一项所述的方法组装的飞行器的一部分。
[0199]
18.一种用于制备用于组装的复合部件(120、120-1)的系统,所述系统包括:
[0200]-心轴(110、110-1),所述心轴(110、110-1)包括:
[0201]-用于复合部件(120、120-1)的铺设表面;以及
[0202]-设置在心轴(110、110-1)处的心轴(110、110-1)转位特征(126、b126);以及
[0203]-心轴工位(130至130-8),所述心轴工位(130至130-8)转位(119、119-1)到心轴转位特征(126、b126),并且将转位特征(126、b126)安装到复合部件(120、120-1)上,该转位特征(126、b126)偏离所述心轴转位特征(114、b114)。
[0204]
19.根据示例18所述的系统,其中,下游工位(160、160-1)转位(119、119-1)到转位特征(126、b126)。
[0205]
20.根据示例18或19所述的系统,其中,下游工位(160、160-1)在所述复合部件(120、120-1)已经从所述心轴(110、110-1)脱模之后接收所述复合部件(120、120-1)。
[0206]
21.根据示例18至20中任一项所述的系统,所述系统进一步包括:所述心轴(110、110-1)在传输所述复合部件(120、120-1)的同时沿处理方向(101、101-9)移动。
[0207]
22.根据示例18至21中任一项所述的系统,其中,所述心轴工位(130至130-8)包括转位特征工具(320),所述转位特征工具(320)切入所述复合部件(120、120-1)中,而不切穿所述复合部件(120、120-1)。
[0208]
23.根据示例18至22中任一项所述的系统,其中,所述心轴工位(130至130-8)的互补键(310)被插入到所述心轴(110、110-1)处的对应键槽(312)中,以将所述心轴工位(130至130-8)转位到所述心轴转位特征(114、b114)。
[0209]
24.使用根据示例18至23中任一项所述的系统制造飞行器的一部分。
[0210]
25.一种用于处理复合部件(120、120-1)的方法,所述方法包括以下步骤:
[0211]-接收复合部件(120、120-1)已经模制到其上的心轴(110、110-1);
[0212]-基于位于心轴(110、110-1)上的转位特征(126、b126)来处理所述复合部件(120、120-1)。
[0213]
26.根据示例25所述的方法,其中,处理所述复合部件(120、120-1)的步骤包括:在脱模之前将转位特征(126、b126)安装到所述复合部件(120、120-1)中。
[0214]
27.根据示例25或26的方法,所述方法进一步包括以下步骤:处理所述复合部件(120、120-1),处理所述复合部件(120、120-1)的步骤包括在脱模之前将毛刺边缘(124-1、124-8)与所述复合部件(120、120-1)分离。
[0215]
28.根据示例25至27中任一项所述的方法,所述方法进一步包括以下步骤:
[0216]-将所述复合部件(120、120-1)从所述心轴(110、110-1)上脱模;
[0217]-沿处理方向(101、101-9)推进所述复合部件(120、120-1);以及
[0218]-经由安装到所述复合部件(120、120-1)中的转位特征(126、b126)将所述复合部件(120、120-1)转位到下游工位(160、160-1)。
[0219]
29.根据示例25至28中任一项所述的方法,所述方法进一步包括以下步骤:操作心轴工位(130至130-8)以在将所述复合部件(120、120-1)从所述心轴(110、110-1)脱模之前将转位特征(126至126-9、b126至b126-9)安装到所述复合部件(120、120-1)的所述制造余量部(122、122-9)中。
[0220]
30.根据示例25至29中任一项所述的方法,所述方法进一步包括以下步骤:将所述心轴工位(130至130-8)转位(119、119-1)到所述心轴(110、110-1)处的心轴转位特征(114、b114)。
[0221]
31.根据示例25至30中任一项所述的方法,其中,安装到所述复合部件(120、120-1)的所述制造余量部(122、122-9)中的所述转位特征(126、b126)偏离所述心轴(110、110-1)处的所述心轴转位特征(114、b114)。
[0222]
32.根据示例25至31中任一项所述的方法,其中,将所述心轴工位(130至130-8)转位(119、119-1)到所述心轴(110、110-1)处的所述心轴转位特征(114、b114)的步骤包括:将所述心轴工位(130至130-8)的互补键(310)插入到所述心轴(110、110-1)处的对应键槽(312)中。
[0223]
33.根据示例25至32中任一项所述的方法,其中,所述心轴工位(130至130-8)沿着所述心轴(110、110-1)处的凹槽(352)和/或轨道(354)而行。
[0224]
34.根据示例25至33中任一项所述的方法,其中,操作所述心轴工位(130至130-8)以安装所述转位特征(126、b126)的步骤包括:在不切穿所述复合部件(120、120-1)的情况下切入到所述复合部件(120、120-1)中。
[0225]
35.根据示例25至34中任一项所述的方法,其中,所述心轴工位(130至130-8)切穿所述复合部件(120、120-1)进入所述心轴(110、110-1)的灌封凹部(322)中,以安装所述转位特征(126、b126)。
[0226]
36.根据示例25至35中任一项所述的方法,其中,安装所述转位特征(126、b126)的步骤包括:在所述复合部件(120、120-1)的所述心轴(110、110-1)处的所述支承边缘(123)、边缘(127)和/或边缘(129-1)中安装凹口(126-9,b126-9)。
[0227]
37.根据示例25至36中任一项所述的方法,其中,安装所述转位特征(126、b126)的步骤包括:在所述复合部件(120、120-1)的支承边缘中安装凹口(126-9,b126-9)。
[0228]
38.根据示例25至37中任一项所述的方法,其中,安装所述转位特征(126、b126)的步骤包括:在制造余量部(122、122-9)、窗制造余量部(128)和/或门制造余量部(128-9)中安装所述转位特征(126、b126)。
[0229]
39.根据示例25至38中任一项所述的方法,所述方法进一步包括:从所述复合部件(120、120-1)移除所述制造余量部(122、122-9)。
[0230]
40.根据示例25至39中任一项所述的方法,其中,操作所述心轴工位(130至130-8)以安装所述转位特征(126、b126)的步骤包括:安装多种类型的转位特征(126至126-9,b126至b126-9),其中,不同类型的转位特征(126至126-9,b126至b126-9)由不同的下游工位(160、160-1)使用。
[0231]
41.根据示例25至40中任一项所述的方法,其中,安装到所述复合部件(120、120-1)的所述制造余量部(122、122-9)、窗制造余量部(128)和/或门制造余量部(128-9)中的所述转位特征(126至126-9、b126至b126-9)选自由以下项组成的组:杯定位特征(126-1、b126-1)、钻孔起始位置(126-2、b126-2)、钻通孔位置(126-3、b126-3)、狭槽(126-4、b126-4)、安装销(126-5、b126-5)、rfid标签(126-6、b126-6)、条形码(126-7、b126-7)、形成的转位特征(126-8、b126-8)和凹口(126-9、b126-9)。
[0232]
42.一种根据示例25至41中任一项所述的方法组装的飞行器的一部分。
[0233]
43.一种用于形成复合部件的设备,所述设备包括:
[0234]-心轴(110、110-1),所述心轴(110、110-1)限定了复合部件(120、120-1)的轮廓,所述心轴(110、110-1)包括;
[0235]-灌封凹部(322),所述灌封凹部(322)设置在用于复合部件(120、120-1)的铺设区域(111,111-1)中,位于提供用于复合部件(120、120-1)的制造余量部(122、122-9)的铺设区域(111,111-1)的位置下方;以及
[0236]-转位轮廓特征,所述转位轮廓特征设置在所述铺设区域(111、111-1)内。
[0237]
44.根据示例43所述的设备,其中,所述心轴(110、110-1)进一步包括设置在所述铺设区域(111,111-1)之外的键槽(312)。
[0238]
45.根据示例43至44所述的设备,其中,所述心轴(110、110-1)进一步包括设置在所述铺设区域(111,111-1)之外的凹槽(352),所述凹槽(352)引导心轴工位(130至130-8)。
[0239]
46.使用根据示例43至45中任一项所述的设备制造飞行器的一部分。
[0240]
47.一种用于制备用于组装的复合部件(120、120-1)的系统,所述系统包括:
[0241]-心轴(110、110-1),所述心轴(110、110-1)包括用于复合部件(120、120-1)的铺设区域(111,111-1);所述复合部件(120、120-1)放置在所述铺设区域(111,111-1)上;以及
[0242]-心轴(110、110-1)转位特征(126、b126),所述心轴(110、110-1)转位特征(126、b126)设置在所述心轴(110、110-1)处。
[0243]
48.根据示例47所述的系统,所述系统进一步包括:转位(119、119-1)到心轴(110、110-1)转位特征(126、b126)的心轴工位(130至130-8)。
[0244]
49.根据示例48所述的系统,其中,所述心轴工位(130至130-8)将转位特征(126、b126)安装到所述复合部件(120、120-1)上,所述转位特征(126、b126)偏离所述心轴转位特征(114、b114)。
[0245]
50.根据示例47至49中任一项所述的系统,所述系统进一步包括:灌封凹部(322),所述灌封凹部(322)设置在铺设区域(111,111-1)中,位于提供用于复合部件(120、120-1)的制造余量部(122、122-9)的铺设区域(111,111-1)的位置下方。
[0246]
51.根据示例47至50中任一项所述的系统,其中,所述心轴(110、110-1)进一步包括设置在所述铺设区域(111,111-1)之外的键槽(312)。
[0247]
52.根据示例47至51中任一项所述的系统,其中,所述心轴(110、110-1)进一步包括设置在所述铺设区域(111,111-1)之外的凹槽(352),所述凹槽(352)引导心轴工位(130至130-8)。
[0248]
53.根据示例47至52中任一项所述的系统,其中,在脱模之前,所述毛刺边缘(124-1、124-8)和制造余量部(122、122-9)与所述复合部件(120、120-1)分离。
[0249]
54.根据示例47至53中任一项所述的系统,其中,分离的毛刺边缘(124-1、124-8)和分离的制造余量部(122、122-9)被收集在滑槽系统(147)中。
[0250]
55.使用根据示例47至54中任一项所述的系统制造飞行器的一部分。
[0251]
56.一种转位特征安装器,包括心轴工位(130至130-8);以及联接到所述心轴工位(130至130-8)的特征创建器(132)。
[0252]
57.根据示例56所述的转位特征安装器,所述转位特征安装器进一步包括联接到心轴工位(130至130-8)的发射器134-1。
[0253]
58.根据示例56或57所述的转位特征安装器,所述转位特征安装器进一步包括联接到所述心轴工位(130至130-8)的转位键(136)。
[0254]
59.根据示例58所述的转位特征安装器,其中,所述转位键(136)包括互补键(310)。
[0255]
60.根据示例56至59中任一项所述的转位特征安装器,其中,所述特征创建器(132)选自由以下项组成的组:刀片(137)、钻头、铣刀、销安装器、rfid标签安装器、条形码安装器和紧固件安装器。
[0256]
61.根据示例56至60中任一项所述的转位特征安装器,其中,所述心轴工位(130至130-8)联接到心轴(110、110-1)。
[0257]
62.根据示例61所述的转位特征安装器,其中,所述心轴工位(130至130-8)通过心轴(110、110-1)中的凹槽(352)联接到心轴(110、110-1)。
[0258]
63.根据示例62所述的转位特征安装器,其中,所述心轴工位(130至130-8)通过可滑动地接合所述凹槽(352)而相对于制造余量部(122、122-9)是可传输的。
[0259]
64.根据示例63所述的转位特征安装器,其中,所述心轴工位(130至130-8)通过经由辊系统(350-1)可滑动地接合所述凹槽(352)而相对于制造余量部(122、122-9)是可传输的。
[0260]
65.根据示例61所述的转位特征安装器,其中,心轴工位(130至130-8)通过心轴(110、110-1)上的轨道(354)联接到所述心轴(110、110-1)。
[0261]
66.根据示例65所述的转位特征安装器,其中,所述心轴工位(130至130-8)通过可滑动地接合所述轨道(354)而相对于制造余量部(122、122-9)是可传输的。
[0262]
67.根据示例66所述的转位特征安装器,其中,所述心轴工位(130至130-8)通过经由辊系统(350-1)可滑动地接合所述轨道(354)而相对于制造余量部(122、122-9)是可传输的。
[0263]
68.根据示例56至67中任一项所述的转位特征安装器,其中,所述互补键(310)被构造成与心轴转位特征(114、b114)互补地配合。
[0264]
69.根据示例60至68中任一项所述的转位特征安装器,其中,所述刀片(137)选自由往复刀片或圆形刀片组成的组。
[0265]
70.根据示例56至69中任一项所述的转位特征安装器,其中:
[0266]
所述心轴工位(130至130-8)包括控制器(150)。
[0267]
尽管本文描述了特定实施方式,但是本公开的范围不限于那些特定实施方式。本公开的范围由以下权利要求书及其任何等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。