技术特征:
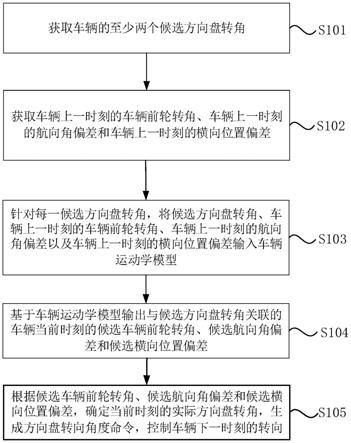
1.一种车辆控制方法,其特征在于,所述方法包括:获取车辆的至少两个候选方向盘转角;获取车辆上一时刻的车辆前轮转角、车辆上一时刻的航向角偏差和车辆上一时刻的横向位置偏差;针对每一候选方向盘转角,将所述候选方向盘转角、所述车辆上一时刻的车辆前轮转角、所述车辆上一时刻的航向角偏差以及所述车辆上一时刻的横向位置偏差输入车辆运动学模型;基于所述车辆运动学模型输出与所述候选方向盘转角关联的车辆当前时刻的候选车辆前轮转角、候选航向角偏差和候选横向位置偏差;根据所述候选车辆前轮转角、候选航向角偏差和候选横向位置偏差,确定当前时刻的实际方向盘转角,生成方向盘转向角度命令,控制所述车辆下一时刻的转向。2.根据权利要求1所述的方法,其特征在于,基于所述车辆运动学模型输出与该候选方向盘转角关联的车辆当前时刻的候选车辆前轮转角、候选航向角偏差和候选横向位置偏差之前,还包括:获取车辆转向控制系统的时间常数、车辆轴距与车辆前轮转角的转向传动比、实际采样时间以及车辆的参考路径;根据所述车辆的参考路径选择距离车辆后轮最近的参考点;并获得所述参考点处的参考车速以及所述参考点处的参考前轮转角;根据所述车辆转向控制系统的时间常数、车辆轴距、车辆前轮转角的转向传动比、实际采样时间、参考车速和参考前轮转角,构建车辆运动学模型。3.根据权利要求2所述的方法,其特征在于,所述根据所述车辆转向控制系统的时间常数、车辆轴距、车辆前轮转角的转向传动比、实际采样时间、参考车速以及参考前轮转角,构建车辆运动学模型,包括:通过如下第一公式确定车辆运动系数a
d
:其中,i表示单位矩阵,v
p
表示参考车速,t表示实际采样时间,δ
p
表示参考前轮转角,l表示车辆轴距,τ表示车辆转向控制系统的时间常数;通过如下第二公式确定方向盘转角系数b
d
:其中,i
steer
表示车辆前轮转角的转向传动比;通过如下第三公式确定车辆运动常量w
d
:
根据所述车辆运动系数a
d
、所述方向盘转角系数b
d
和所述车辆运动常量w
d
,构建车辆运动学模型:其中,δ
k 1
表示车辆当前时刻的候选车辆前轮转角,e
head_k 1
表示车辆当前时刻的候选航向角偏差,e
lat_k 1
表示车辆当前时刻的候选横向位置偏差,δ
sw_cmd
表示候选方向盘转角,δ
k
表示车辆上一时刻的车辆前轮转角,e
head_k
表示车辆上一时刻的航向角偏差,e
lat_k
表示车辆上一时刻的横向位置偏差。4.根据权利要求2所述的方法,其特征在于,所述获得所述参考点处的参考前轮转角,包括:获得所述参考点处的曲率;根据所述参考点处的曲率和所述车辆轴距,确定所述参考点处的参考前轮转角。5.根据权利要求1所述的方法,其特征在于,根据所述候选车辆前轮转角、候选航向角偏差和候选横向位置偏差,确定当前时刻的实际方向盘转角,包括:比较所述候选车辆前轮转角和所述车辆上一时刻的车辆前轮转角,得到第一比较结果;比较所述候选航向角偏差和所述车辆上一时刻的航向角偏差,得到第二比较结果;比较所述候选横向位置偏差和所述车辆上一时刻的横向位置偏差,得到第三比较结果;根据所述第一比较结果、第二比较结果以及第三比较结果,确定当前时刻的实际方向盘转角。6.一种车辆控制装置,其特征在于,包括:第一获取模块,用于获取车辆的至少两个候选方向盘转角;第二获取模块,用于获取车辆上一时刻的车辆前轮转角、车辆上一时刻的航向角偏差和车辆上一时刻的横向位置偏差;输入模块,用于针对每一候选方向盘转角,将所述候选方向盘转角、所述车辆上一时刻的车辆前轮转角、所述车辆上一时刻的航向角偏差以及所述车辆上一时刻的横向位置偏差输入车辆运动学模型;输出模块,用于基于所述车辆运动学模型输出与所述候选方向盘转角关联的车辆当前时刻的候选车辆前轮转角、候选航向角偏差和候选横向位置偏差;执行模块,用于根据所述候选车辆前轮转角、候选航向角偏差和候选横向位置偏差,确定当前时刻的实际方向盘转角,生成方向盘转向角度命令,控制所述车辆下一时刻的转向。
7.一种电子设备,其特征在于,包括:一个或多个处理器;存储器,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-5中任一项所述的车辆控制方法。8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-5中任一项所述的车辆控制方法。
技术总结
本发明公开了一种车辆控制方法、装置、设备以及存储介质。该方法包括:获取车辆的至少两个候选方向盘转角;获取车辆上一时刻的车辆前轮转角、航向角偏差和横向位置偏差;针对每一候选方向盘转角,将候选方向盘转角、车辆上一时刻的车辆前轮转角、航向角偏差以及横向位置偏差输入车辆运动学模型;基于车辆运动学模型输出与候选方向盘转角关联的车辆当前时刻的候选车辆前轮转角、候选航向角偏差和候选横向位置偏差;根据候选车辆前轮转角、候选航向角偏差和候选横向位置偏差,确定当前时刻的实际方向盘转角,生成方向盘转向角度命令,控制车辆下一时刻的转向。通过本发明的技术方案,能够提高自动驾驶车辆转向控制的准确性。能够提高自动驾驶车辆转向控制的准确性。能够提高自动驾驶车辆转向控制的准确性。
技术研发人员:黄海洋 尚秉旭 王洪峰 陈志新 刘洋 张勇
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:2022.02.21
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。