1.本发明涉及一种用于变电站巡检用的四足机器人及无人机组件,属于电力系统设备技术领域。
背景技术:
2.变电站是指电力系统中对电压和电流进行变换、接受电能以及分配电能的场所,在发电厂内的变电站是升压变电站,其作用是将发电机发出的电能升压后馈送到高压电网中。为保证变电站的安全使用,需要定期对变电站进行巡检,人工巡检是变电站巡检的传统作业方式,但是巡检人员有时由于工作劳累和厌烦等因素,很容易造成漏检、错检,可见人工巡检难以保证电力系统的安全可靠运行。因此变电站使用巡检机器人完成巡检任务已经成为一种发展趋势。
3.但是单独使用巡检机器人完成巡检任务仍存在以下问题:
4.一、巡检机器人由于行走限制,拍摄目标有时会超出巡检摄像组件的拍摄范围从而导致漏检。
5.二、巡检机器人的摄像组件与巡检机器人之间存在角度限制,会产生巡检死角,从而导致摄像组件无法拍摄到的情况。
6.公开号为cn205021584u的中国实用新型专利中公开的一种电力设备巡检机器人及电力设备巡检机器人系统,包括:行走装置和巡检装置;行走装置包括:支撑架,在支撑架上设置有至少一个连接孔;巡检装置上设置有与连接孔匹配的插头,插头能够插入到连接孔内,并能够从连接孔内拔出,以使行走装置与巡检装置结合或分离;电力设备巡检机器人系统,包括上述电力设备巡检机器人,还包括:后台控制器;电力设备巡检机器人通过无线通讯模块与后台控制器交互信息;信息包括下列信息的一种或多种:电力设备实时负荷电流、红外测温值、设备异常报警信息、障碍物报警信息、巡检区域内人脸识别信息、巡检区域内声音采集识别信息、电力设备刀闸位置识别信息。
7.上述参考例利用巡检机器人进行巡检,但是其只能在地面上进行巡检,适用性差,仍然存在无法检测到的盲区,因此急需进行改进。
技术实现要素:
8.为了克服现有的变电站电力巡检机器人巡检范围有限、巡检机器人存在拍摄盲区等的缺点,本发明设计了一种用于变电站巡检用的四足机器人及无人机组件,其降低了变电站巡检人员的工作强度,降低了巡检过程中的触电风险,并且解决了巡检机器人巡检过程中存在拍摄盲区的问题。
9.为了实现上述目的,本发明采用如下技术方案:
10.一种用于变电站巡检用的四足机器人及无人机组件,包括机器人本体和巡检无人机,机器人本体包括机身、设置在机身内部的机巢以及若干与机身连接用于行走的机足;巡检无人机设置在机巢内,机巢顶端开口设置且开口两侧滑动连接有滑动盖门;机身内部底
端设置有控制系统仓,控制系统仓内设置有:控制模块:用于接收、计算、处理和传输数据;电源模块:与控制模块电连接,用于提供电能;传感器模块:与控制模块电连接,用于向控制模块反馈电信号;驱动模块:与控制模块电连接,用于根据控制模块的指令驱动各部件运动;数据存储模块:与控制模块电连接,用于暂存巡检工作过程中采集到的数据;通讯模块:与控制模块电连接,用于巡检工作过程中采集到的数据回传到巡检监控室;机身的后端设置有用于采集巡检场地的实时图像的巡检摄像模块,且巡检摄像模块与数据存储模块通讯连接,机身的前端设置有与驱动模块通讯连接的机械臂,机械臂包括依次转动连接的底座、第一连接臂和第二连接臂,底座与机身转动连接,第二连接臂自由端转动连接有u型连接件,u型连接件的u型槽内转动连接有前置摄像头,前置摄像头与数据存储模块通讯连接,u型连接件侧面设置有安装块,安装块内滑动连接有由驱动模块驱动运动的伸缩电容笔,伸缩电容笔一端伸出安装块设置。
11.进一步地,巡检摄像模块包括从上至下依次连接的图像采集装置、云台和升降机构,云台内部还设置有用于驱动云台转动的转动机构和用于驱动图像采集装置上下摆动的摆动机构,图像采集装置底端设置有倒置的u型连接架,u型连接架两端固定在云台顶端两侧。
12.进一步地,图像采集装置内还设置有红外热成像仪,图像采集装置的镜头前端还设置有雨刷,雨刷与图像采集装置外壳转动连接,镜头底端还设置有第二补光灯。
13.进一步地,升降机构包括活动圆台和升降电机,活动圆台侧面对称设置有一对卡接平面,机身上设置有与活动圆台形状相适应的安装孔,活动圆台上下活动嵌设在安装孔内且顶端伸出安装孔后与云台底端连接,升降电机设置在活动圆台底端,升降电机输出端向上设置且连接有丝杆,丝杆自由端螺纹贯穿固定在活动圆台底端的固定圆盘后伸入到活动圆台内部。
14.进一步地,转动机构包括转动电机以及相互配合传动且均设置在云台内部底端的第一蜗轮和第一蜗杆,转动电机通过皮带与第一蜗杆传动连接,第一蜗轮底端固定有传动连接件,传动连接件底端转动贯穿云台底端后与活动圆台固定连接。
15.进一步地,摆动机构包括摆动电机、转轴以及相互配合传动的第二蜗杆和第二蜗轮,摆动电机输出端与第二蜗杆传动连接,转轴与第二蜗轮固定套接,且转轴两端转动贯穿云台侧壁后与u型连接架两端固定连接。
16.进一步地,巡检无人机前端设置有拍摄摄像头和第一补光灯,巡检无人机底端还设置有支撑架,支撑架与机巢底端通过磁力吸附连接,巡检无人机顶端还设置有天线。
17.进一步地,机足包括下肢、上肢和肩部,上肢一端与下肢铰接,另一端侧面一体设置有连接壳,肩部侧面设置有传动轴,传动轴与机身内设置的第一驱动电机传动连接,肩部内部设置有第二驱动电机,第二驱动电机与连接壳传动连接,连接壳内设置有第三驱动电机,第三驱动电机输出端传动连接有圆形连接件,下肢与圆形连接件之间设置有连接杆,且连接杆一端与下肢铰接,另一端与圆形连接件偏离圆心的位置铰接。
18.进一步地,传感器模块包括设置在机身前端的激光雷达以及设置在控制系统仓内的陀螺仪和霍尔传感器。
19.进一步地,机巢内还设置有呈矩形设置的限位架。
20.与现有技术相比本发明有以下特点和有益效果:
21.1、本发明通过设置机器人本体和巡检无人机,机器人本体能够根据预先设定好的程序进行巡检,节省了人力,减轻了巡检人员的工作负担,保证了巡检人员的安全,且利用机器人巡检可以随时进行高强度地巡检工作,极大地保证了变电站的安全,当遇到机器人本体无法达到的巡检区域时,可以通过后台终端控制巡检无人机进行辅助巡检,保证了变电站的无死角巡检,杜绝了漏检的情况,保证变电站的财产安全,能够有效的对事故作出预警。
22.2、本发明通过机械臂的设置,当遇到小障碍时,能够通过机械臂的调节实现对巡检区域的拍摄,不需要启动无人机,可以降低装置的能耗,保证装置的续航能力,并且机械臂上还设置有伸缩电容笔,可以应对一些需要接触或者按压的巡检区域,提高了装置的适用性,机械臂配合巡检摄像模块和无人机,实现地面、高空各个区域的完全巡检,进一步提高了巡检的工作效率,保证了变电站的安全。
23.3、本发明的巡检摄像模块通过转动结构、升降机构和摆动机构的设置,实现了图像采集装置的转动、升降和摆动,有利于实现对巡检区域以及周围环境的全方位监测,且转动结构、升降机构和摆动机构三者相互配合,能够保证图像采集装置在拍摄图像过程中始终保持最好的角度以拍摄最清晰的图像,避免出现因为图像模糊而导致的重复巡检,保证了巡检过程中的安全性和便利性,大大提高了工作效率。
附图说明
24.图1是本发明第一视角的整体结构示意图;
25.图2是本发明第二视角的整体结构示意图;
26.图3是本发明第三视角的整体结构示意图;
27.图4是本发明第四视角的整体结构示意图;
28.图5是本发明的机械臂的第一视角的结构示意图;
29.图6是本发明的机械臂的第二视角的结构示意;
30.图7是本发明的机械臂的第三视角的结构示意;
31.图8是本发明的巡检摄像模块的第一视角的结构示意图;
32.图9是本发明的巡检摄像模块的第二视角的结构示意图;
33.图10是本发明的巡检摄像模块的第三视角的结构示意图;
34.图11是本发明的云台的内部结构示意图;
35.图12是本发明的活动圆台的结构示意图;
36.图13是本发明的无人机的第一视角的结构示意图;
37.图14是本发明的无人机的第二视角的结构示意图;
38.图15是本发明的机足的整体结构示意图;
39.图16是本发明的机足的连接结构示意图;
40.图17是本发明的连接框图。
41.其中附图标记为:1、机器人本体;11、机身;111、控制系统仓;12、机巢;13、机足;131、下肢;1311、连接杆;1312、圆形连接件;132、上肢;1321、连接壳;133、肩部;1331、传动轴;14、滑动盖门;15、限位架;2、巡检无人机;21、拍摄摄像头;22、第一补光灯;23、天线;24、支撑架;3、巡检摄像模块;31、图像采集装置;311、雨刷;312、红外热成像仪;313、镜头;314、
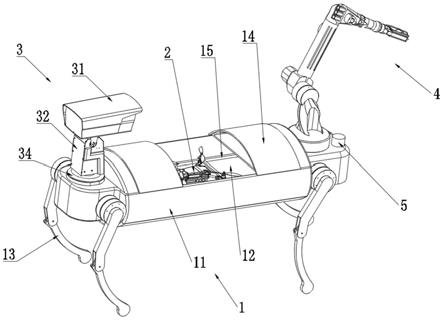
第二补光灯;315、u型连接架;32、云台;33、转动机构;331、转动电机;332、皮带;333、第一蜗轮;334、第一蜗杆;34、升降机构;341、活动圆台;3411、卡接平面;342、升降电机;343、固定圆盘;
42.344、丝杆;35、摆动机构;351、摆动电机;352、第二蜗杆;353、转轴;
43.354、第二蜗轮;4、机械臂;41、底座;42、第一连接臂;43、第二连接臂;431、安装块;432、电容笔;44、前置摄像;45、u型连接件;5、激光雷达;10、控制模块;20、电源模块;30、传感器模块;40、驱动模块;50、数据存储模块;60、通讯模块;70、巡检监控室。
具体实施方式
44.下面结合实施例对本发明进行更详细的描述。
45.如图1至17所示,本实施例的用于变电站巡检用的四足机器人及无人机组件,包括机器人本体1和巡检无人机2,巡检无人机2前端设置有用于拍摄的拍摄摄像头21,机器人本体1包括机身11、设置在机身11内部顶端的机巢12以及设置在机身11四个角落处用于行走的机足13;巡检无人机2设置在机巢12内,机巢12顶端开口设置且开口两侧滑动连接有滑动盖门14,在巡检无人机2不使用时关闭滑动盖门14以保护巡检无人机2;
46.机身11内部底端设置有控制系统仓111,控制系统仓111内设置有:
47.控制模块10:用于接收、计算、处理和传输数据;
48.电源模块20:与控制模块10电连接,用于提供电能;
49.传感器模块30:与控制模块10电连接,用于向控制模块10反馈传感器产生的电信号,以便于控制模块10发出相应的指令控制各部件继续完成巡检工作;
50.驱动模块40:与控制模块10电连接,用于根据控制模块10的指令驱动各部件运动;
51.数据存储模块50:与控制模块10电连接,用于暂存巡检工作过程中采集到的数据;
52.通讯模块60:与控制模块10电连接,用于将巡检工作过程中采集到的数据回传到巡检监控室70;
53.机身11的后端设置有用于采集巡检场地的实时图像的巡检摄像模块3,且巡检摄像模块3与数据存储模块50通讯连接,机身11的前端设置有由驱动模块40驱动的机械臂4,机械臂4包括依次转动连接的底座41、第一连接臂42和第二连接臂43,底座41与机身11转动连接,第二连接臂43自由端转动连接有u型连接件45,u型连接件45的u型槽内转动连接有前置摄像头44,前置摄像头44与数据存储模块50通讯连接,u型连接件45侧面设置有安装块431,安装块431内滑动连接有由驱动模块40驱动运动的伸缩电容笔432,伸缩电容笔432一端伸出安装块431设置,底座41、第一连接臂42和第二连接臂43均由无刷电机驱动转动,各无刷电机均与驱动模块40通讯连接,变电站内布置有密集的表计,单纯使用巡检摄像模块3会存在高度不够的情况从而导致数据采集的遗漏,可能引发严重后果,通过机械臂4的设置,利用驱动模块40驱动机械臂4运动进行多角度的调节,可以精准地对准待巡检区域,然后利用前置摄像头44进行各类数据的采集,辅助完成巡检摄像模块3无法采集到区域的巡检工作,同时通过伸缩电容笔432的设置,在一些比较狭窄的区域,可以控制伸缩电容笔432伸出用于需要实现触控和按钮的操作,进一步提高了装置的适用性,保证了巡检工作的顺利进行。
54.进一步地,巡检摄像模块3包括从上至下依次连接的图像采集装置31、云台32和升
降机构34,云台32内部还设置有用于驱动云台32转动的转动机构33和用于驱动图像采集装置31上下摆动的摆动机构35,图像采集装置31底端设置有u型连接架315,u型连接架315两端固定在云台32顶端两侧,巡检摄像模块3用于采集巡检场地的图像数据,以及用于监视机器人本体1的周边环境,以防出现意外情况无法应对。
55.进一步地,图像采集装置31内还设置有红外热成像仪312,图像采集装置31的镜头313前端还设置有雨刷311,雨刷311与图像采集装置31外壳转动连接,镜头313底端还设置有第二补光灯314,红外热成像仪312用于实时监测变电设备的温度,及时发现温度异常,提高安全性,有效预防事故的发生,雨刷311和第二补光灯314的设置能够帮助图像采集装置31采集更为清晰的图像,避免图像不清晰而导致的重复巡检拍摄,提高了工作效率。
56.进一步地,升降机构34包括活动圆台341和升降电机342,活动圆台341侧面对称设置有一对卡接平面3411,机身11上设置有与活动圆台341形状相适应的安装孔,活动圆台341上下活动嵌设在安装孔内且顶端伸出安装孔后与云台32底端连接,升降电机342设置在活动圆台341底端,活动圆台341底端还固定有固定圆盘343,升降电机342输出端向上设置且通过联轴器连接有丝杆344,丝杆344自由端螺纹贯穿固定圆盘343后伸入到活动圆台341内部,工作时,启动升降电机342,升降电机342启动带动丝杆344转动,丝杆344转动过程中,由于活动圆台341受到卡接平面3411的限位作用无法转动,因此固定圆盘343则在螺纹的作用下向上或向下运动,进而实现云台32的升降,卡接平面3411的设置有效地实现了活动圆台341的转动限位,同时也为活动圆台341提供了一个安装基准,方便安装、提高了安装效率,升降电机342与驱动模块40电连接,可以根据传感器模块30的反馈实现根据具体的场地智能调节升降电机342的升降,有助于提高工作效率。
57.进一步地,转动机构33包括转动电机331以及相互配合传动且均设置在云台32内部底端的第一蜗轮333和第一蜗杆334,转动电机331通过皮带332与第一蜗杆334传动连接,第一蜗轮333底端固定有传动连接件,传动连接件底端转动贯穿云台32底端后与活动圆台341固定连接,使用时,通过启动转动电机331,转动电机331通过皮带332带动第一蜗杆334转动,第一蜗杆334转动时,由于第一蜗轮333通过传动连接件与活动圆台341固定连接,故在力的作用力和反作用力的作用下,第一蜗杆334绕着第一蜗轮333转动,进而带动云台32转动实现转动调节,通过转动电机331、第一蜗轮333和第一蜗杆334的设置,实现云台32的稳定转向,提高了巡检时的适用性,大大提高了机器人本体1的工作效率。
58.进一步地,摆动机构35包括摆动电机351、转轴353以及相互配合传动的第二蜗杆352和第二蜗轮354,摆动电机351输出端与第二蜗杆352传动连接,转轴353与第二蜗轮354固定套接,且转轴353两端转动贯穿云台32侧壁后与u型连接架315两端固定连接,启动摆动电机351带动第二蜗杆352转动,第二蜗杆352转动带动第二蜗轮354转动,第二蜗轮354转动带动转轴353转动,转轴353转动带动两端连接的u型连接架315摆动,进而实现图像采集装置31的摆动以适应不同巡检位置的拍摄工作,大大提高了装置的适用性。
59.进一步地,巡检无人机2上的拍摄摄像头21的侧面设置有第一补光灯22,巡检无人机2底端还设置有支撑架24,支撑架24与机巢12底端通过磁力吸附连接,巡检无人机2顶端还设置有用于增加信号接收能力的天线23,第一补光灯22辅助拍摄摄像头21拍摄保证巡检无人机2拍摄图像的质量,同时支撑架24的设置保证巡检无人机2停放在机巢12内时的稳定性,保证装置的使用寿命。
60.进一步地,机足13包括下肢131、上肢132和肩部133,上肢132一端与下肢131铰接,另一端侧面一体设置有连接壳1321,肩部133侧面设置有传动轴1331,传动轴1331与机身11内设置的第一驱动电机传动连接,肩部133内部设置有第二驱动电机,第二驱动电机与连接壳1321传动连接,连接壳1321内设置有第三驱动电机,第三驱动电机输出端传动连接有圆形连接件1312,下肢131与圆形连接件1312之间设置有连接杆1311,且连接杆1311一端与下肢131铰接,另一端与圆形连接件1312偏离圆心的位置铰接,第一驱动电机、第二驱动电机和第三驱动电机均与驱动模块40电连接,驱动模块40根据传感器模块30的反馈信号驱动机足13进行相应的动作,实现对障碍的及时响应,保证巡检工作的正常进行,并且下肢131、上肢132和肩部133分别由三个电机驱动控制,能够实现对复杂路况的及时应对,防止机器人本体1摔倒,有效提高了巡检过程中的工作效率。
61.进一步地,传感器模块30包括设置在机身11前端的激光雷达5以及设置在控制系统仓111内的陀螺仪和霍尔传感器,陀螺仪用于控制机器人本体1的自身姿态,防止跌倒,保证巡检工作的正常进行,霍尔传感器用于反馈信号电流或电压,有利于控制电机平稳运行。
62.进一步地,机巢12内还设置有呈矩形设置的限位架15,防止巡检无人机2位置偏移,保证巡检无人机2出仓顺利。
63.本发明的工作原理:变电站需要巡检时,工作人员在巡检监控室70里通过通讯信号远程控制机器人本体1出仓,各组件根据后台预先设定的路径开始前进,同时激光雷达5开始工作,控制模块10依据控制程序控制各机足13运动前进,并根据设定的巡检路线实行巡检,巡检信息通过图像采集装置31抓拍,同时通过红外热成像仪312实时监测设备温度,巡检摄像模块3将采集到的信息传输到数据存储模块50暂存,同时数据通过通讯模块60以无线通信(如5g)的方式传输到巡检监控室70的后台终端,控制人员在后台终端可实时观看巡检结果;遇到小障碍时,机械臂4开始工作辅助拍摄,当遇到机器人本体1无法巡检到的死角时,驱动模块40控制滑动盖门14开启,然后控制巡检无人机2启动,巡检无人机2升起并飞出机巢12,依据后台终端给出的信号开始巡检,巡检无人机2上的拍摄摄像头21开始工作进行信息采集,并将采集的信息通过无线通讯的方式传输给数据存储模块50存储,然后再通过通讯模块60发送到后台终端接收存储;巡检无人机2巡检完成后返回机巢12,并关上滑动盖门14,同时通过电源模块20对巡检无人机2进行无线充电(或自动接触式充电)。
64.在本发明的描述中,需要说明的是,术语“内”、“外”、“上”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
65.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
66.显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。