1.本发明涉及吸风设备技术领域,尤其涉及一种风机及扫地机器人。
背景技术:
2.扫地机器人为人们的日常打扫卫生带来了极大便利性。扫地机器人的行走底盘上集成有集尘盒、风道、风机、水盒等。扫地机器人的行走底盘的底部集成有毛刷、拖布等。风机安装在风道中,通过吸风的方式来除尘。
3.现有的风机仅具有一个扇叶,吸风量不够大,末端的吸力不够,导致较大颗粒的杂物不能吸到集尘盒中,还需要人工二次清扫。
4.有鉴于此,提供一种吸风量大、吸力强的风机及扫地机器人成为必要。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种吸风量大、吸力强的风机及扫地机器人。
6.本发明技术方案提供一种风机,包括风机风筒、风机马达和安装在所述风机风筒中的两个扇叶;
7.所述风机风筒具有相对的风筒进风端和风筒出风端;
8.其中一个所述扇叶处于所述风筒进风端中,另一个所述扇叶处于所述风筒出风端中;
9.所述风机马达安装在所述风机风筒中,所述风机马达处于两个所述扇叶之间;
10.所述风机马达的输出端通过转轴与所述扇叶连接。
11.在其中一项可选技术方案中,两个所述扇叶都为轴流扇叶。
12.在其中一项可选技术方案中,处于所述风筒进风端中的所述扇叶为离心扇叶,处于所述风筒出风端中的所述扇叶为轴流扇叶。
13.在其中一项可选技术方案中,所述离心扇叶包括扇叶圆环、圆形的扇叶底板和多条肋板;
14.所述扇叶底板与所述转轴连接,所述扇叶圆环的半径大于所述扇叶底板的半径,所述扇叶圆环与所述扇叶底板同轴布置;
15.多条所述肋板间隔地连接在所述扇叶圆环与所述扇叶底板之间,任意相邻的两条所述肋板之间形成有离心出风口。
16.在其中一项可选技术方案中,所述风筒出风端包括有扩张部,其中一个所述扇叶处于所述扩张部中;
17.在沿着从所述风筒进风端至所述风筒出风端的方向上,所述扩张部的半径逐渐变大。
18.在其中一项可选技术方案中,所述风机马达包括有马达定子和处于所述马达定子中的马达转子,所述转轴穿过所述马达转子,所述转轴与所述马达转子同步转动。
19.在其中一项可选技术方案中,所述风机风筒中具有两个连接支架,两个所述连接支架处于所述风机马达的相对两侧,每个所述连接支架上都具有支架环;
20.所述转轴上具有两个用于与所述支架环配合的装配环,两个所述装配环处于所述风机马达的相对两侧;
21.所述装配环套接在所述转轴上,所述装配环可枢转地安装在所述支架环中;或者,所述装配环固定安装在所述支架环中,所述转轴间隙穿过所述装配环。
22.在其中一项可选技术方案中,所述风筒进风端和所述风筒出风端上分别配置有风筒盖板,所述风筒盖板具有多个通风口。
23.本发明技术方案还提供一种扫地机器人,包括行走底盘、安装在所述行走底盘上的集尘盒、安装在所述行走底盘上的风道和前述任一技术方案所述的风机;
24.所述风道具有风道进风端和风道出风端,所述集尘盒朝向所述风道进风端的一侧具有滤芯,所述风道出风端处于所述行走底盘的侧部;
25.所述风机安装在所述风道中,所述风机处于所述风道进风端和所述风道出风端之间。
26.在其中一项可选技术方案中,所述风道包括风道下壳和与所述风道下壳可拆卸连接的风道上壳,所述风机的风机风筒固定安装在所述风道下壳上。
27.采用上述技术方案,具有如下有益效果:
28.本发明提供的风机及扫地机器人,在风机风筒中配置两个扇叶,两个扇叶同步转动,提高了吸风量,增强了吸力,较大颗粒的杂物也可被吸入到集尘盒中,改善了清扫效果。
附图说明
29.参见附图,本发明的公开内容将变得更易理解。应当理解:这些附图仅仅用于说明的目的,而并非意在对本发明的保护范围构成限制。图中:
30.图1为本发明第一实施例提供的风机的立体图;
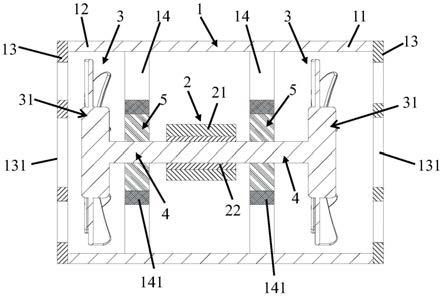
31.图2为图1所示的风机的剖视图;
32.图3为图1所示的风机风筒的立体图;
33.图4为图1所示的风筒盖板的立体图;
34.图5为图2所示的装配环的立体图;
35.图6为轴流扇叶的立体图;
36.图7为本发明第二实施例提供的风机的立体图;
37.图8图7所示的风机的剖视图;
38.图9为图8中轴流扇叶、风机马达及离心扇叶的爆炸图;
39.图10为图9所示的离心扇叶的立体图;
40.图11为本发明第三实施例提供的风机的立体图;
41.图12为两个扇叶都为轴流扇叶的风机的爆炸图;
42.图13为一个扇叶为轴流扇叶,另一个扇叶为离心扇叶的风机的爆炸图;
43.图14为本发明一实施例提供的扫地机器人的立体图;
44.图15为扫地机器人的行走底盘上安装有风道和集尘盒的立体图;
45.图16为风机、风道及滤芯的爆炸图。
具体实施方式
46.下面结合附图来进一步说明本发明的具体实施方式。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
47.如图1-2、图7-9和图10-13所示,本发明实施例提供的风机100,包括风机风筒1、风机马达2和安装在风机风筒1中的两个扇叶3。
48.风机风筒1具有相对的风筒进风端11和风筒出风端12。
49.其中一个扇叶3处于风筒进风端11中,另一个扇叶3处于风筒出风端12中。
50.风机马达2安装在风机风筒1中,风机马达2处于两个扇叶3之间。
51.风机马达2的输出端通过转轴4与扇叶3连接。
52.本发明提供的风机100,其内部安装有两个扇叶3,可提高吸风量,提升吸风能力,利于提升扫地机器人的清扫效果。
53.具体地,该风机100包括有风机风筒1,风机风筒1呈圆筒形。风机风筒1的一端为风筒进风端11,其另一端为风筒出风端12。
54.一个扇叶3处于风筒进风端11中,另一个扇叶3处于风筒出风端12中。
55.风机马达2安装在风机风筒1中,其处于风筒进风端11和风筒出风端12之间。优选地,风机马达2处于风机风筒1的中部。
56.风机马达2的马达输出端通过转轴4与两个扇叶3连接,带动两个扇叶3同步转动,提高了吸风量,增强了吸力。在将该风机100应用到扫地机器人上后,较大颗粒的杂物也可被吸入到集尘盒中,改善了清扫效果。
57.在其中一个实施例中,如图2和图12所示,两个扇叶3都为轴流扇叶31。
58.轴流扇叶31包括中心盘311和多片倾斜布置的叶片312。中心盘311与转轴4连接,在转轴4被风机马达2带动转动时,叶片推动空气以与风机风筒1的轴向相同的方向流动,利于气流在风机风筒1中快速移动。
59.在其中一个实施例中,如图8-9和图13所示,处于风筒进风端11中的扇叶3为离心扇叶32,处于风筒出风端12中的扇叶3为轴流扇叶31。
60.本实施例中,风筒进风端11的扇叶3为离心扇叶32,风筒出风端12的扇叶3为轴流扇叶31。离心扇叶32用于将气流引导向离心扇叶32的侧部,也即是使得气流吹向风机风筒1的内壁侧,避开中间的风机马达2,再经轴流扇叶31作用离开风筒出风端12。
61.本实施例中,通过在风筒进风端11中配置离心扇叶32,可减少气流吹向中心的风机马达2,利于气体顺利流动,也有利于降低风噪。
62.在其中一个实施例中,如图10所示,离心扇叶32包括扇叶圆环321、圆形的扇叶底板322和多条肋板323。
63.扇叶底板322与转轴4连接,扇叶圆环321的半径大于扇叶底板322的半径,扇叶圆环321与扇叶底板322同轴布置。
64.多条肋板323间隔地连接在扇叶圆环321与扇叶底板322之间,任意相邻的两条肋板323之间形成有离心出风口324。
65.本实施例中,离心扇叶32主要由扇叶圆环321、圆形的扇叶底板322和多条肋板323组成。扇叶圆环321的半径大,扇叶底板322的半径小,两者同轴布置,扇叶底板322与转轴4
连接,扇叶圆环321形成进气口。每条肋板323都连接在扇叶圆环321与扇叶底板322之间,相邻的两条肋板323间隔布置,从而在相邻的两条肋板323之间形成有离心出风口324。在离心扇叶32转动时,气体从扇叶圆环321进入,然后离心出风口324排出。
66.在其中一个实施例中,如图11-13所示,风筒出风端12包括有扩张部121,其中一个扇叶3处于扩张部121中。在沿着从风筒进风端11至风筒出风端12的方向上,扩张部121的半径逐渐变大。
67.本实施例中,通过改变风筒出风端12的形状,在沿着气流的流向上,风筒出风端12的扩张部121的半径逐渐变大,利于气体快速向风筒出风端12流动排出,进一步提高了风机100的吸风量和吸风能力。
68.在其中一个实施例中,如图2所示,风机马达2包括有马达定子21和处于马达定子21中的马达转子22,转轴4穿过马达转子22,转轴4与马达转子22同步转动。
69.本实施例中,两个扇叶3通过一根转轴4连接,转轴4穿过风机马达2的马达转子22,转轴4与马达转子22可通过键连接,马达转子22在相对于马达定子21转动时,带动转轴4一体转动,结构体积小,并方便安装。
70.在其中一个实施例中,如图2-3、图8和图12-13所示,风机风筒1中具有两个连接支架14,两个连接支架14处于风机马达2的相对两侧,每个连接支架14上都具有支架环141。
71.转轴4上具有两个用于与支架环141配合的装配环5,两个装配环5处于风机马达2的相对两侧。
72.装配环5套接在转轴4上,装配环5可枢转地安装在支架环141中。或者,装配环5固定安装在支架环141中,转轴4间隙穿过装配环5。
73.本实施例中,在风机风筒1中安装有两个连接支架14,连接支架14的主体上具有支架通风孔,连接支架14的中部具有支架环141。风机马达2处于两个连接支架14之间。
74.与每个扇叶3连接的转轴4上都装配有装配环5,两个装配环5分别与两个支架环141装配,以支撑起转轴4。
75.转轴4、装配环5及支架环141具有如下两种连接方式:
76.连接方式一:装配环5套接在转轴4上,装配环5与转轴4一体转动。装配环5间隙配合在支架环141中,装配环5可在支架环141中转动。根据需要,可在支架环141的两侧设置有挡边,以挡住装配环5。
77.连接方式二:装配环5固定安装在支架环141中,转轴4穿过装配环5的中心孔51,转轴4可在中心孔51中转动。根据需要,可在转轴4上开设限位槽,以避免转轴4与装配环5发生轴向位移。
78.在其中一个实施例中,如图1-2、图4、图7-8和图11-13所示,风筒进风端11和风筒出风端12上分别配置有风筒盖板13,风筒盖板13具有多个通风口131。
79.风筒盖板13可通过螺钉、卡扣等安装在风机风筒1的端部。风筒盖板13既起到保护内部结构的作用,又具有通风功能。
80.如图14-16所示,本发明一实施例的提供一种扫地机器人200,包括行走底盘201、安装在行走底盘201上的集尘盒203、安装在行走底盘201上的风道205和前述任一实施例所述的风机100。
81.风道205具有风道进风端2051和风道出风端2052,集尘盒203朝向风道进风端2051
的一侧具有滤芯204,风道出风端2052处于行走底盘201的侧部。
82.风机100安装在风道205中,风机205处于风道进风端2051和风道出风端2052之间。
83.本实施例提供的扫地机器人200包括行走底盘201、顶盖202、集尘盒203、滤芯204、风道205和风机100。
84.有关风机100的结构、构造及工作原理,请参考前面对风机100的描述部分,在此不再赘述。
85.行走底盘201具有滚轮,可通过电机带动行走。顶盖202铰接在行走底盘201上。集尘盒203和风道205分别安装在行走底盘201上。集尘盒203用于收纳吸入的杂物灰尘等。集尘盒203的出风口上具有滤芯204。
86.风道205具有风道进风端2051和风道出风端2052,风道出风端2052处于行走底盘201的侧部。在安装好集尘盒203后,滤芯204处于风道进风端2051中,起到阻挡杂物进入风道205的作用。
87.由于,风机100中具有两个扇叶3,提高了吸风量,增强了吸力,较大颗粒的杂物也可被吸入到集尘盒203中,改善了清扫效果。
88.在其中一个实施例中,如图16所示,风道205包括风道下壳2053和与风道下壳2053可拆卸连接的风道上壳2054,风机100的风机风筒1固定安装在风道下壳2053上。
89.本实施例中,风道205包括风道下壳2053和风道上壳2054,风机风筒1通过紧固件固定安装在风道下壳2053上,风道上壳2054与风道下壳2053可通过卡扣、螺钉等连接,方便安装和拆卸维修。
90.综上所述,本发明提供的风机及扫地机器人,在风机风筒1中配置两个扇叶3,两个扇叶3同步转动,提高了吸风量,增强了吸力,较大颗粒的杂物也可被吸入到集尘盒203中,改善了清扫效果。
91.根据需要,可以将上述各技术方案进行结合,以达到最佳技术效果。
92.以上所述的仅是本发明的原理和较佳的实施例。应当指出,对于本领域的普通技术人员来说,在本发明原理的基础上,还可以做出若干其它变型,也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
