1.本发明属于液压技术领域,特别涉及一种负载敏感剪叉式高空作业车及其液压控制系统,适用于剪叉式高空作业车液压控制系统的设备。
背景技术:
2.高空作业车是运送工作人员和使用器材到现场并进行空中作业的专用车辆。其中剪叉式高空作业车是用途广泛的高空作业专用设备,它的剪叉机械结构使升降台起升有较高的稳定性,宽大的作业平台和较高的承载能力,使高空作业范围更大、并适合多人同时作业,并使高空作业效率更高,安全更保障。
3.目前,剪叉式高空作业车液压控制系统包括举升控制油路、转向控制油路、刹车解除控制油路、行走控制油路等。现有技术的剪叉式高空作业车液压控制存在以下技术缺陷:1)、考虑到车辆行驶时的安全性,转向控制油路采用优先阀或补偿阀来控制转向动作优先于行走动作;转向控制油路和行走控制回路是并联油路,行走优先阀提供给了转向油缸一侧所需要的流量,但是转向油缸另一侧的回油直接流回了油箱,会造成行走速度不够和能量损失;2)、行走控制油路中未设置平衡阀,在下坡时容易造成行走不平稳;或者是在进油路设置了两路平衡阀,增加了成本,能耗大,结构复杂,故障率高,泄漏严重,动作不可靠,占用空间较大,维修不方便。
4.如何设计一种负载敏感剪叉式高空作业车及其液压控制系统,如何让作业车行走平稳并降低能耗,成为急需解决的问题。
技术实现要素:
5.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种负载敏感剪叉式高空作业车及其液压控制系统,用于解决现有技术中存在的考虑到车辆行驶时的安全性,转向控制油路采用优先阀或补偿阀来控制转向动作优先于行走动作;转向控制油路和行走控制回路是并联油路,行走优先阀提供给了转向油缸一侧所需要的流量,但是转向油缸另一侧的回油直接流回了油箱,会造成行走速度不够和能量损失;行走控制油路中未设置平衡阀,在下坡时容易造成行走不平稳;或者是在进油路设置了两路平衡阀,增加了成本,能耗大,结构复杂,故障率高,泄漏严重,动作不可靠,占用空间较大,维修不方便的问题。
6.为实现上述目的,本发明提供一种负载敏感剪叉式高空作业车液压控制系统,包括油箱,所述的油箱通过定量泵与集成油路阀组的输入端连接,集成油路阀组内设置有四条油路,四条油路从左到右依次为举升控制油路、转向控制油路、刹车解除控制油路、行走控制油路,举升控制油路与举升油缸连接,转向控制油路与转向油缸连接,刹车解除控制油路与制动器连接,行走控制油路与行走马达连接;
7.其中,集成油路阀组输出端通过回油管路与油箱相通;
8.转向控制油路中连接有补偿阀,行走控制油路中连接有平衡阀,补偿阀通过第四单向阀与行走控制油路连通;
9.通过采用这种技术方案:转向控制油路与行走控制油路通过第四单向阀实现串联连通。
10.于本发明的一实施例中,所述的集成油路阀组输入端为进油口,集成油路阀组输出端为回油口;
11.进油口分两路输出,一路与二位四通阀a连通,另一路通过第二安全阀与回油口连通。
12.于本发明的一实施例中,所述的二位四通阀a分别与举升油缸、第一安全阀、补偿阀连通,第一安全阀与回油口连通。
13.于本发明的一实施例中,所述的补偿阀与三位五通阀b或三位五通阀a连通;补偿阀的负载控制口与三位五通阀b连通,三位五通阀b与转向油缸连通。
14.于本发明的一实施例中,所述的三位五通阀b还分别与第四单向阀、第一阻尼器、第二阻尼器、第三安全阀连通。
15.于本发明的一实施例中,所述的三位五通阀b与回油口通过第一阻尼器和第二阻尼器连通;
16.第四单向阀还分别与第三安全阀、第三单向阀、第三阻尼器连通,其中第三阻尼器、第三单向阀分别与制动器连通。
17.于本发明的一实施例中,所述的第三安全阀与平衡阀连通,平衡阀分别与三位五通阀a、第一单向阀、第二单向阀连通,
18.通过采用这种技术方案:三位五通阀a与平衡阀的连通,产生马达回油背压,在下坡时行走平稳;
19.第二单向阀与行走马达连通,实现行走马达补油;
20.三位五通阀a分别与回油口、二位四通阀b、行走马达连通;
21.二位四通阀b与行走马达连通。
22.本发明提供一种负载敏感剪叉式高空作业车,采用上述的一种负载敏感剪叉式高空作业车液压控制系统。
23.如上所述,本发明提供一种负载敏感剪叉式高空作业车及其液压控制系统,结构简单,集成油路阀组上的阀体均采用螺纹式插装阀,外型体积小,操作控制精确简便,工作稳定可靠,无泄漏,具有高效率和节约能耗,降低了设备造价,集成度高,推广应用具有良好的经济效益和社会效益。
附图说明
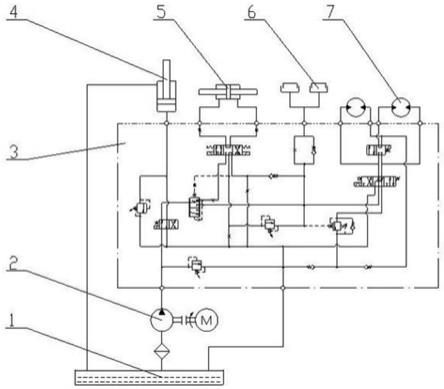
24.图1为本发明的结构示意图。
25.图2为本发明的集成油路阀组内部结构示意图。
26.图中:1.油箱;2.定量泵;3.集成油路阀组;4.举升油缸;5.转向油缸;6.制动器;7.行走马达;301.补偿阀;302.第一安全阀;303.二位四通阀a;304.第一阻尼器;305.进油口;306.第二安全阀;307.第二阻尼器;308.回油口;309.第三安全阀;310.第一单向阀;311.第二单向阀;312.平衡阀;313.三位五通阀a;314.二位四通阀b;315.第三单向阀;316.第三阻尼器;317.第四单向阀;318.三位五通阀b;319.负载控制口。
具体实施方式
27.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
28.请参阅图1至图2。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
29.如图1所示,本发明提供一种负载敏感剪叉式高空作业车液压控制系统,包括油箱1,所述的油箱1通过定量泵2与集成油路阀组3的输入端连接,集成油路阀组3内设置有四条油路,四条油路从左到右依次为举升控制油路、转向控制油路、刹车解除控制油路、行走控制油路,举升控制油路与举升油缸4连接,转向控制油路与转向油缸5连接,刹车解除控制油路与制动器6连接,行走控制油路与行走马达7连接;
30.其中,集成油路阀组3输出端通过回油管路与油箱1相通;
31.如图2所示,转向控制油路中连接有补偿阀301,行走控制油路中连接有平衡阀312,补偿阀301通过第四单向阀317与行走控制油路连通;
32.通过采用这种技术方案:转向控制油路与行走控制油路通过第四单向阀317实现串联连通;
33.所述的集成油路阀组3输入端为进油口305,集成油路阀组3输出端为回油口308;
34.进油口305分两路输出,一路与二位四通阀a303连通,另一路通过第二安全阀306与回油口308连通;
35.所述的二位四通阀a303分别与举升油缸4、第一安全阀302、补偿阀301连通,第一安全阀302与回油口308连通;
36.所述的补偿阀301与三位五通阀b318或三位五通阀a313连通;补偿阀301的负载控制口319与三位五通阀b318连通,三位五通阀b318与转向油缸5连通;
37.所述的三位五通阀b318还分别与第四单向阀317、第一阻尼器304、第二阻尼器307、第三安全阀309连通;
38.所述的三位五通阀b318与回油口308通过第一阻尼器304和第二阻尼器307连通;
39.第四单向阀317还分别与第三安全阀309、第三单向阀315、第三阻尼器316连通,其中第三阻尼器316、第三单向阀315分别与制动器6连通;
40.所述的第三安全阀309与平衡阀312连通,平衡阀312分别与三位五通阀a313、第一单向阀310、第二单向阀311连通,
41.通过采用这种技术方案:三位五通阀a313与平衡阀312的连通,产生马达回油背压,在下坡时行走平稳;
42.第二单向阀311与行走马达7连通,实现行走马达7补油;
43.三位五通阀a313分别与回油口308、二位四通阀b314、行走马达7连通;
44.二位四通阀b314与行走马达7连通。
45.本发明提供一种负载敏感剪叉式高空作业车,采用上述的一种负载敏感剪叉式高空作业车液压控制系统。
46.具体实施时,补偿阀301也能采用负载敏感优先阀替换使用;
47.一、举升油缸的工作过程:通过二位四通阀a303的电磁换向控制举升油缸4的升降运动;
48.二、转向油缸的工作过程:
49.1)、三位五通阀b318位于中位时,转向油缸5不进油;
50.2)、三位五通阀b318换向到右位工作时,电磁换向控制转向油缸5一侧的进油;二位四通阀a303在换向后能通过补偿阀301提供给了转向油缸5一侧所需要的流量,同时转向油缸5另一侧的回油通过第四单向阀317、第三安全阀309提供给制动器6及行走马达7,避免了液压油直接流回油箱造成的行走速度不够和能量损失;
51.3)、三位五通阀b318换向到左位工作时,电磁换向控制转向油缸5一侧的回油通过第四单向阀317、第三安全阀309提供给制动器6及行走马达7,补偿阀301流向转向油缸5的液压油通过第一阻尼器304和第二阻尼器307回油,阻尼器能控制转向油缸5液压缸活塞移动以及抑制管道或设备周期性载荷和冲击载荷;
52.三、刹车解除控制油路的工作过程:
53.通过第三阻尼器316、第三单向阀315对制动器6供油,随时制动;
54.四、行走控制油路的工作过程:
55.1)、三位五通阀a313位于中位时,行走马达7不进油;
56.2)、三位五通阀a313换向到左位工作时,补偿阀301换向给三位五通阀a313供油,二位四通阀b314换向,行走马达7一侧进油,行走马达7另一侧回油且三位五通阀a313与平衡阀312连通,产生马达回油背压,在下坡时行走平稳;平衡阀312分别与第一单向阀310、第二单向阀311连通,第二单向阀311与行走马达7连通,实现行走马达7补油;
57.3)、三位五通阀a313换向到右位工作时,行走马达7另一侧进油,行走马达7一侧回油,且三位五通阀a313与平衡阀312连通,产生马达回油背压,在下坡时行走平稳;平衡阀312分别与第一单向阀310、第二单向阀311连通,第二单向阀311与行走马达7连通,实现行走马达7补油。
58.本发明实现了高空作业车的举升、转向、制动解除、行走动作,相对于现有技术,采用本发明的剪叉式高空作业车行走平稳,降低了能耗,实现了整机节能。
59.综上所述,本发明提供一种负载敏感剪叉式高空作业车及其液压控制系统,结构简单,集成油路阀组上的阀体均采用螺纹式插装阀,外型体积小,操作控制精确简便,工作稳定可靠,无泄漏,具有高效率和节约能耗,降低了设备造价,集成度高,广泛用于剪叉式高空作业车设备上。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
60.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。