1.本发明属于轨道巡检机器人技术领域,尤其涉及一种用于轨道巡检机器人的轨道清扫装置。
背景技术:
2.铁路的钢轨上容易积存大小不一的石子或其它杂物附着在钢轨上。当动车组经过存在异物的钢轨上时,钢轨上的异物与动车组轮缘相互磕碰造成轮缘的磕伤损坏,极易造成动车组严重的质量问题。因此,需要定时对钢轨进行清扫和剔除杂物。
技术实现要素:
3.(一)要解决的技术问题
4.针对现有存在的技术问题,本发明提供一种用于轨道巡检机器人的轨道清扫装置,不仅结构简单,而且能够很方便地清除钢轨上的异物,保障列车的行驶安全。
5.(二)技术方案
6.为了达到上述目的,本发明采用的主要技术方案包括:
7.一种用于轨道巡检机器人的轨道清扫装置,包括:主机、障碍物清理模块、超声波清洗模块和风力清理模块;
8.所述障碍物清理模块、所述超声波清洗模块和所述风力清理模块均固定设置在所述主机的下方,并与所述主机控制连接;
9.所述主机设置在轨道巡检机器人上,并能够借助于所述障碍物清理模块、所述超声波清洗模块和所述风力清理模块对轨道巡检机器人巡检沿线的一侧轨道执行清洁工作;
10.所述障碍物清理模块能够清理钢轨三面的大块障碍物,以保障车辆的安全通行;
11.所述超声波清洗模块和所述风力清理模块能够清理钢轨三面附着的异物,以降低钢轨的环境损耗。
12.优选地,所述主机包括:壳体和控制组件;
13.所述控制组件设置在所述壳体内;
14.所述壳体上设有多个与轨道巡检机器人可拆卸连接的连接组件;
15.所述主机能够借助于所述连接组件安装在轨道巡检机器人上。
16.优选地,所述障碍物清理模块包括:顶部可伸缩刷臂组件,左侧可伸缩刷臂组件和右侧可伸缩刷臂组件;
17.所述顶部可伸缩刷臂组件、所述左侧可伸缩刷臂组件和所述右侧可伸缩刷臂组件均固定设置在所述主机的底部,并与所述主机的壳体可拆卸连接。
18.优选地,所述顶部可伸缩刷臂组件包括:第一可伸缩气缸臂和第一钢刷部;
19.所述第一可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述第一钢刷部,用以清理钢轨顶面的障碍物;
20.所述第一可伸缩气缸臂还与所述控制组件控制连接;
21.优选地,所述左侧可伸缩刷臂组件和所述右侧可伸缩刷臂组件的结构相同;
22.其中,所述左侧可伸缩刷臂组件包括:第二可伸缩气缸臂和第二钢刷部;
23.所述第二可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述第二钢刷部,用以清理钢轨左侧面的障碍物;
24.所述第二可伸缩气缸臂还与所述控制组件控制连接;
25.所述右侧可伸缩刷臂组件设置在所述壳体的右侧,用以清理钢轨右侧的障碍物;
26.所述第一钢刷部和所述第二钢刷部上均设有压力传感器;
27.所述压力传感器与所述控制组件连接。
28.优选地,所述超声波清洗模块包括:顶部可伸缩超声清洗组件、左侧可伸缩超声清洗组件、所述右侧可伸缩超声清洗组件和超声清洗液储备组件;
29.所述顶部可伸缩超声清洗组件、所述左侧可伸缩超声清洗组件和所述右侧可伸缩超声清洗组件均固定设置在所述主机的底部,并与所述主机的壳体可拆卸连接;
30.所述超声清洗液储备组件设置在所述壳体内,并能够分别为所述顶部可伸缩超声清洗组件、所述左侧可伸缩超声清洗组件和所述右侧可伸缩超声清洗组件提供清洗液。
31.优选地,所述顶部可伸缩超声清洗组件包括:第三可伸缩气缸臂和第一超声波清洗发生装置;
32.所述第三可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述第一超声清洗发生装置,用以清洗钢轨顶面的附着物;
33.所述第三可伸缩气缸臂和所述第一超声清洗发生装置均与所述控制组件控制连接。
34.优选地,所述左侧可伸缩超声清洗组件与所述右侧可伸缩超声清洗组件的结构相同;
35.其中,所述左侧可伸缩超声清洗组件包括:第四可伸缩气缸臂和第二超声波清洗发生装置;
36.所述第四可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述第二超声清洗发生装置,用以清洗钢轨左侧面的附着物;
37.所述第四可伸缩气缸臂与所述第二超声清洗发生装置均与所述控制组件控制连接。
38.优选地,所述超声清洗液储备组件还分别与所述第一超声清洗发生装置和所述第二超声清洗发生装置连接,并能够分别为所述第一超声清洗发生装置和所述第二超声清洗发生装置提供清洗液;
39.所述第一超声清洗发生装置和所述第二超声清洗发生装置均能够将超声清洗液喷洒到钢轨的表面,并向钢轨的表面发射超声波,用以清洗钢轨表面的附着物。
40.优选地,所述风力清理模块包括:第五可伸缩气缸臂和风机;
41.所述第五可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述风机,用以清理钢轨表面的灰尘;
42.所述第五可伸缩气缸臂和所述风机均与所述控制组件连接;
43.所述壳体内还设有储电装置;
44.所述储电装置能够分别为所述控制组件、所述障碍物清理模块、所述超声波清洗
模块和所述风力清理模块供电;
45.所述控制组件还与轨道巡检机器人的控制系统连接。
46.(三)有益效果
47.本发明的有益效果是:本发明提供的一种用于轨道巡检机器人的轨道清扫装置,具有以下有益效果:
48.不仅结构简单,而且能够很方便地清除钢轨上的异物,保障列车的行驶安全,延长钢轨的寿命。
49.【附图标记说明】
50.1:钢轨;2:主机;3:风力清理模块;4:顶部可伸缩刷臂组件;5:左侧可伸缩刷臂组件;6:右侧可伸缩刷臂组件;7:顶部可伸缩超声清洗组件;8:左侧可伸缩超声清洗组件;9:右侧可伸缩超声清洗组件。
附图说明
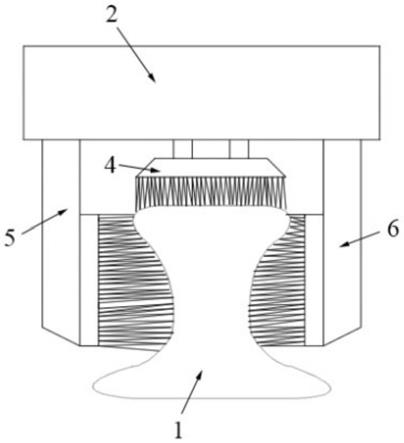
51.图1为本发明提供的一种用于轨道巡检机器人的轨道清扫装置的障碍物清理模块的截面结构示意图;
52.图2为本发明提供的一种用于轨道巡检机器人的轨道清扫装置的超声波清洗模块的截面结构示意图;
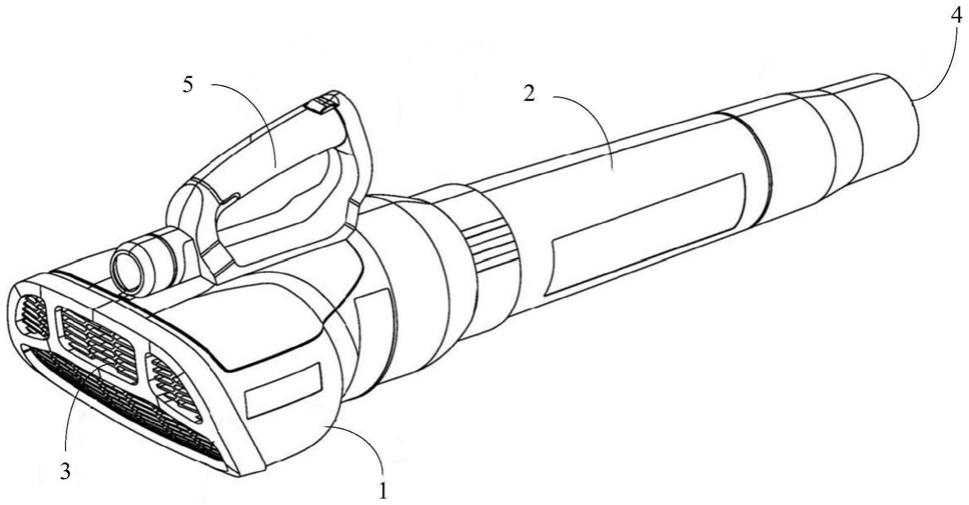
53.图3为本发明提供的一种用于轨道巡检机器人的轨道清扫装置的侧面结构示意图;
54.图4为本发明提供的一种用于轨道巡检机器人的轨道清扫装置的电路控制连接结构示意图。
具体实施方式
55.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
56.如图1-图4所示,本实施例中公开了一种用于轨道巡检机器人的轨道清扫装置,包括:主机2、障碍物清理模块、超声波清洗模块和风力清理模块3;所述障碍物清理模块、所述超声波清洗模块和所述风力清理模块3均固定设置在所述主机2的下方,并与所述主机2控制连接;所述主机2设置在轨道巡检机器人上,并能够借助于所述障碍物清理模块、所述超声波清洗模块和所述风力清理模块3对轨道巡检机器人巡检沿线的一侧轨道执行清洁工作;所述障碍物清理模块能够清理钢轨1三面的大块障碍物,以保障车辆的安全通行;所述超声波清洗模块和所述风力清理模块3能够清理钢轨1三面附着的异物,以降低钢轨1的环境损耗。
57.该轨道清扫装置在实际使用的过程中,在轨道巡检机器人的两侧各安装一个,能够同时清理两侧的钢轨1,而且还与轨道巡检机器人控制连接;轨道巡检机器人能够精准地控制轨道清扫装置的每一模块进行高效清理钢轨1上的异物。
58.详细地,本实施例中所述的主机2包括:壳体和控制组件;所述控制组件设置在所述壳体内;所述壳体上设有多个与轨道巡检机器人可拆卸连接的连接组件;所述主机2能够借助于所述连接组件安装在轨道巡检机器人上。
59.该安装组件为可拆卸式安装组件,在实际使用中拆卸效率十分高,而且采购零件维修同样便捷。
60.本实施例中所述的障碍物清理模块包括:顶部可伸缩刷臂组件4,左侧可伸缩刷臂组件5和右侧可伸缩刷臂组件6;所述顶部可伸缩刷臂组件4、所述左侧可伸缩刷臂组件5和所述右侧可伸缩刷臂组件6均固定设置在所述主机2的底部,并与所述主机2的壳体可拆卸连接。
61.该清理模块为模块化设计,不仅结构简单,而且维修更换难度小,成本低,效率高。
62.本实施例中所述的顶部可伸缩刷臂组件4包括:第一可伸缩气缸臂和第一钢刷部;所述第一可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述第一钢刷部,用以清理钢轨1顶面的障碍物;所述第一可伸缩气缸臂还与所述控制组件控制连接。
63.该壳体的底部设有多个安装槽,分别用于安装障碍物清理模块、超声波清洗模块和风力清理模块3。
64.应说明的是:本实施例中所述的左侧可伸缩刷臂组件5和所述右侧可伸缩刷臂组件6的结构相同。
65.其中,所述左侧可伸缩刷臂组件5包括:第二可伸缩气缸臂和第二钢刷部;所述第二可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述第二钢刷部,用以清理钢轨1左侧面的障碍物;所述第二可伸缩气缸臂还与所述控制组件控制连接;所述右侧可伸缩刷臂组件设置在所述壳体的右侧,用以清理钢轨右侧的障碍物;所述第一钢刷部和所述第二钢刷部上均设有压力传感器;所述压力传感器与所述控制组件连接。
66.该压力传感器能够探测到钢刷与钢轨1之间的压力,避免压力过大导致对钢轨1造成过度的磨损。
67.本实施例中所述的超声波清洗模块包括:顶部可伸缩超声清洗组件7、左侧可伸缩超声清洗组件8、所述右侧可伸缩超声清洗组件9和超声清洗液储备组件。所述顶部可伸缩超声清洗组件7、所述左侧可伸缩超声清洗组件8和所述右侧可伸缩超声清洗组件9均固定设置在所述主机2的底部,并与所述主机2的壳体可拆卸连接。
68.所述超声清洗液储备组件设置在所述壳体内,并能够分别为所述顶部可伸缩超声清洗组件7、所述左侧可伸缩超声清洗组件8和所述右侧可伸缩超声清洗组件9提供清洗液。
69.本实施例中所述的顶部可伸缩超声清洗组件7包括:第三可伸缩气缸臂和第一超声波清洗发生装置;所述第三可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述第一超声清洗发生装置,用以清洗钢轨1顶面的附着物;所述第三可伸缩气缸臂和所述第一超声清洗发生装置均与所述控制组件控制连接。
70.应说明的是:该第一超声清洗发生装置能够在向钢轨1表面喷洒清洗液的同时,发射设定频率的超声波,用以加强清洗效果。
71.本实施例中所述的左侧可伸缩超声清洗组件8与所述右侧可伸缩超声清洗组件9的结构相同;其中,所述左侧可伸缩超声清洗组件8包括:第四可伸缩气缸臂和第二超声波清洗发生装置;所述第四可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述第二超声清洗发生装置,用以清洗钢轨1左侧面的附着物。所述第四可伸缩气缸臂与所述第二超声清洗发生装置均与所述控制组件控制连接。
72.本实施例中所述的超声清洗液储备组件还分别与所述第一超声清洗发生装置和
所述第二超声清洗发生装置连接,并能够分别为所述第一超声清洗发生装置和所述第二超声清洗发生装置提供清洗液;所述第一超声清洗发生装置和所述第二超声清洗发生装置均能够将超声清洗液喷洒到钢轨1的表面,并向钢轨1的表面发射超声波,用以清洗钢轨1表面的附着物。
73.本实施例中所述的风力清理模块3包括:第五可伸缩气缸臂和风机;所述第五可伸缩气缸臂的一端与所述壳体可拆卸连接,另一端安装所述风机,用以清理钢轨1表面的灰尘;所述第五可伸缩气缸臂和所述风机均与所述控制组件连接;所述壳体内还设有储电装置;所述储电装置能够分别为所述控制组件、所述障碍物清理模块、所述超声波清洗模块和所述风力清理模块3供电;所述控制组件还与轨道巡检机器人的控制系统连接。
74.具体地,将本实施例中提供的清扫装置安装在轨道巡检机器人上,当机器人在铁路轨道上走行时,其控制系统控制清扫装置的主机2,再由主机2控制各个模块执行清扫工作;例如;障碍物清理模块、超声波清洗模块和风力清理模块3都具有可伸缩气缸臂结构,主机2能够控制相应的可伸缩气缸臂结构调整长度,用以匹配相应钢轨1的尺寸,便于更好地执行清理异物的工作。
75.以上结合具体实施例描述了本发明的技术原理,这些描述只是为了解释本发明的原理,不能以任何方式解释为对本发明保护范围的限制。基于此处解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。