1.本发明涉及工业自动化制造领域,具体涉及一种基于物联网的电路板用层压机器人及其层压方法。
背景技术:
2.随着工业信息科技的不断发展,信息通讯科技也在飞速的发展。电路板作为信息通通讯产品基础的元件之一,已然渗透到各个领域中。电路板可称为印刷线路板或印刷电路板,具有配线密度高、重量轻、厚度薄、弯折性好的特点,因此广受新兴产品的青睐。随着发展,对电路板的生产要求也变得越来越为严苛。在对电路板进行生产加工时,繁琐的工艺步骤中,对电路板进行层压作业是不可少的,而需要进行层压的叠层板种类也是多样的,如何掌握不同种类叠层板按压时的力度,是对电路板进行层压作业的关键之处。
3.传统的电路板层压机器人只能对单一种类的叠层板进行层压作业,无法根据不同种类的叠层板材质和重量来调正按压力度,无法同时应对多种种类的叠层板层压作业。
技术实现要素:
4.发明目的:提供一种基于物联网的电路板用层压机器人,并进一步提供一种基于上述基于物联网的电路板用层压机器人的层压方法,以解决现有技术存在的上述问题。
5.技术方案:一种基于物联网的电路板用层压机器人,包括传输组件和旋转叠层组件两个部分。
6.其中,传输组件包括支撑柱和传送板两个部分;所述支撑柱用于对所述传输组件的整体进行承载和位置的限定;所述传送板置于所述支撑柱的一端,并与所述支撑柱固定连接,用于对所要进行层压作业的电路板进行传送;旋转叠层组件包括基柱、基板、旋转机构和按压机构四个部分。所述基柱架设于所述支撑柱的两侧,用于对所述旋转叠层装置的整体进行支撑;所述基板置于所述基柱的一端,并与所述基柱固定连接,用于对所述旋转叠层组件的各个部件进行承载;所述旋转机构置于所述基座工作面的表面,并于所述基板固定连接,用于对叠层板进行旋转更换;所述按压机构置于所述旋转机构的一侧,并与所述基板固定连接,用于对叠层板进行层压作业。
7.在进一步的实施例中,所述传送板表面覆盖有传送履带,用于对需要进行层压作业的电路板进行传送;且所述传送履带工作面表面每隔距离处设有固定组件,用于对传送过程中的电路板进行挤压固定,避免在对叠层板进行传送过程中,因叠层板自身惯性原因导致出现位置偏移或掉落出所述传送履带的表面,影响后续层压作业的精准度。所述基板覆盖于所述传送履带的表面。
8.在进一步的实施例中,所述固定组件包括固定板、挤压板和伸缩柱三个部分。所述固定板置于所述传送履带工作面的表面,并于所述传送履带固定连接,用于对所述固定组件的整体位置进行限定;所述挤压板置于所述固定板工作面的表面,并与所述固定板滑动连接固定,具有沿所述固定板工作面表面进行往复滑动的灵活度;且所述挤压板为多个,并
对称式分布于所述固定板工作面的表面;在后期的传送作业过程中,所述挤压板可根据所要进行传送的叠层板的尺寸沿所述固定板的表面进行滑动调节;所述伸缩柱置于多个所述挤压板之间,具有跟随所述挤压板的移动而进行伸缩运动的灵活度;且所述伸缩柱与所述固定板为滑动连接固定,具有沿所述固定板工作面表面进行往复滑动的灵活度;在后期的传送作业过程中,所述伸缩柱也可根据所要进行传送的叠层板的尺寸沿所述固定板的表面进行滑动调节,完成对叠层板的挤压固定工作。
9.在进一步的实施例中,所述旋转机构包括承载柱、旋转板和叠层固定机构三个部分。所述承载柱置于所述基板工作面的表面,且一端与所述基板固定连接,用于对所述旋转机构的各个组件进行承载;所述旋转板置于所述承载柱的另一端,并与所述承载柱轴接固定,具有绕与所述承载柱的连接点进行全方位转动的灵活度;所述叠层固定机构置于所述旋转板工作面表面,并与所述旋转板固定连接,具有跟随所述旋转板的转动而转动的灵活度;在后期的层压作业过程中,可通过所述旋转板的转动带动所述叠层固定机构的转动,进而完成对叠层板的更换和依次层压作业。
10.在进一步的实施例中,所述旋转板表面每隔预定距离处设有通孔,所述叠层固定机构置于所述旋转板表面的通孔内,并与所述旋转板卡位连接固定;且所述基板表面设有与所述旋转板表面的通孔尺寸相对应的通孔,所述按压机构置于与所述基板表面通孔位置相对应处,使得在后期的层压作业过程中所述按压机构可通过所述基板表面的通孔对所述传送履带表面的电路板进行层压作业。
11.在进一步的实施例中,所述叠层固定机构包括套板和伸缩板两个部分。所述套板置于所述旋转板工作面表面的通孔内,并于所述旋转板卡位连接固定;所述伸缩板置于所述套板靠近所述基板的一面的表面,且一端与所述套板固定连接,具有沿与所述传送履带垂直方向进行往复伸缩的灵活度;在后期的层压作业过程中,所述伸缩板可展开为掉落的叠层板进行方向和位置的限定和指引。
12.在进一步的实施例中,所述按压机构包括定位柱、调节柱和施压装置三个部分。所述定位柱置于所述旋转板的一侧,且一端与所述基板固定连接,用于对所述按压机构的整体位置进行定位和限定;所述调节柱置于所述定位柱的另一端,并于所述定位柱固定连接,用于所述按压机构的整体高度调节;所述施压装置置于所述调节柱的表面,并与所述调节柱固定连接,用于对电路板进行层压作业。所述定位柱进一步与所述基板为滑动连接固定,具有沿所述基板的表面进行往复滑动的灵活度;在后期的层压作业过程中,所述定位柱可通过在所述基板表面的往复滑动带动所述调节柱和所述施压装置的移动,进而完成对所述按压机构的作业位置进行调整。
13.在进一步的实施例中,所述施压装置包括衔接板、调节板、滑动板和按压桶四个部分。所述衔接板置于所述调节柱的表面,且一面与所述调节柱滑动连接固定,具有沿所述调节柱表面进行往复滑动的灵活度,用于所述施压装置与所述调节柱之间的相互衔接;所述调节板置于所述衔接板的另一面,且一端与所述衔接板固定连接,具有沿所述调节板的工作方向进行伸缩调节的灵活度;所述滑动板置于所述调节板的另一端,并与所述调节板固定连接,用于对所述施压装置的施压位置进行调节;所述按压桶置于所述滑动板的工作面表面,且一面与所述滑动板固定连接,具有沿所述滑动板表面进行往复滑动的灵活度,所述按压桶靠近所述基板的一端设有红外扫描组件,用于对需要进行层压作业的电路板表面进
行扫描成像分析。
14.在进一步的实施例中,所述套板的工作面表面设有具有预定收容性的开放式通孔,所述通孔内设有一端与所述套板固定连接的伸缩挡板,具有在所述套板的开放式通孔内进行往复伸缩的灵活度;所述按压桶靠近所述基板的一端处设有与所述套板工作面表面的开放式通孔相适配的延伸按压板,具有沿与所述套板垂直方向进行往复伸缩的灵活度;且所述套板内部设有微重感应器,用于对放置于所述套板上的叠层板进行称重。
15.一种基于物联网的电路板用层压机器人的层压方法,包括以下步骤:s1、人工把需要进行层压的电路板依次放置于传送履带表面的固定组件上,并通过对固定板和挤压板的调节,完成对电路板的挤压固定,启动传送履带对电路板进行传送;s2、人工把需要进行叠层的叠层板按顺序依次放置于套板表面,旋转板启动,开始进行旋转;当套板旋转置于按压组件相对应位置处时停止转动;按压桶对套板表面的叠层板进行扫描,同时套板对叠层板的重量进行称重,并将称重扫描分析后的数据传送至按压桶,对按压桶的下压力度进行调节;s3、传送履带将电路板传送至与基板表面通孔相对应处时停止传送;按压桶压滑动板表面向靠近套板的方向移动,移动至与叠层板相接触时,伸缩挡板收起,伸缩板展开,延伸按压板展开,叠层板沿伸缩板下落,延伸按压板将叠层板按压至电路板表面;s4、按压完毕后,延伸按压板收回,伸缩板收回,伸缩挡板展开,按压桶向远离套板的方向移动;s5、以此类推,依次重复s1至s4工作,直到所要进行层压作业的电路板全部层压完毕为止。
16.有益效果:本发明涉及一种基于物联网的电路板用层压机器人及其层压方法,由工业机器人代替人工完成电路板生产作业过程中的层压步骤,人工只需要需要进行层压的电路板和需要依次进行叠层的叠层板放置于传送组件和旋转叠层组件上即可,能够有效提高电路板的生产效率。本发明所述旋转叠层板设有重量感应和红外扫描装置,可快速对叠层板的重量进行称重,并进行数据分析,而后将分析数据发送至按压机构处,使得所述按压机构看快速对按压力度进行调节。
附图说明
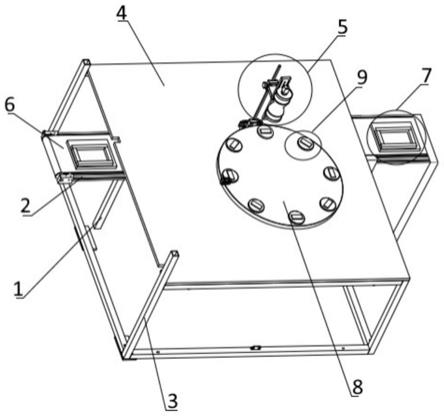
17.图1为本发明整体的示意图。
18.图2为本发明所述旋转机构的整体示意图。
19.图3为本发明所述按压机构的整体示意图。
20.图4为本发明所述固定组件的整体示意图。
21.图中各附图标记为:支撑柱1、传送板2、基柱3、基板4、按压机构5、传送履带6、固定组件7、旋转板8、叠层固定机构9、承载柱10、套板901、伸缩板902、定位柱501、调节柱502、衔接板503、调节板504、滑动板505、按压桶606、固定板701、挤压板702、伸缩柱703。
具体实施方式
22.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以
实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
23.申请人认为,传统的电路板层压机器人只能对单一种类的叠层板进行层压作业,无法根据不同种类的叠层板材质和重量来调正按压力度,无法同时应对多种种类的叠层板层压作业。
24.为此,申请人设计一种基于物联网的电路板用层压机器人及其层压方法,由工业机器人代替人工完成电路板生产作业过程中的层压步骤,人工只需要需要进行层压的电路板和需要依次进行叠层的叠层板放置于传送组件和旋转叠层组件上即可,能够有效提高电路板的生产效率。
25.本发明涉及的基于物联网的电路板用层压机器人主要包括传输组件和旋转叠层组件两个部分。其中,传输组件包括支撑柱1和传送板2两个部分;所述支撑柱1用于对所述传输组件的整体进行承载和位置的限定;所述传送板2置于所述支撑柱1的一端,并与所述支撑柱1固定连接,用于对所要进行层压作业的电路板进行传送;旋转叠层组件包括基柱3、基板4、旋转机构和按压机构5四个部分。所述基柱3架设于所述支撑柱1的两侧,用于对所述旋转叠层装置的整体进行支撑;所述基板4置于所述基柱3的一端,并与所述基柱3固定连接,用于对所述旋转叠层组件的各个部件进行承载;所述旋转机构置于所述基座工作面的表面,并于所述基板4固定连接,用于对叠层板进行旋转更换;所述按压机构5置于所述旋转机构的一侧,并与所述基板4固定连接,用于对叠层板进行层压作业。
26.进一步优选的实施方式中,所述传送板2表面覆盖有传送履带6,用于对需要进行层压作业的电路板进行传送;且所述传送履带6工作面表面每隔距离处设有固定组件7,用于对传送过程中的电路板进行挤压固定,避免在对叠层板进行传送过程中,因叠层板自身惯性原因导致出现位置偏移或掉落出所述传送履带6的表面,影响后续层压作业的精准度。所述基板4覆盖于所述传送履带6的表面。
27.进一步优选的实施方式中,所述固定组件7包括固定板701、挤压板702和伸缩柱703三个部分。所述固定板701置于所述传送履带6工作面的表面,并于所述传送履带6固定连接,用于对所述固定组件7的整体位置进行限定;所述挤压板702置于所述固定板701工作面的表面,并与所述固定板701滑动连接固定,具有沿所述固定板701工作面表面进行往复滑动的灵活度;且所述挤压板702为多个,并对称式分布于所述固定板701工作面的表面;在后期的传送作业过程中,所述挤压板702可根据所要进行传送的叠层板的尺寸沿所述固定板701的表面进行滑动调节;所述伸缩柱703置于多个所述挤压板702之间,具有跟随所述挤压板702的移动而进行伸缩运动的灵活度;且所述伸缩柱703与所述固定板701为滑动连接固定,具有沿所述固定板701工作面表面进行往复滑动的灵活度;在后期的传送作业过程中,所述伸缩柱703也可根据所要进行传送的叠层板的尺寸沿所述固定板701的表面进行滑动调节,完成对叠层板的挤压固定工作。
28.进一步优选的实施方式中,所述旋转机构包括承载柱10、旋转板8和叠层固定机构9三个部分。所述承载柱10置于所述基板4工作面的表面,且一端与所述基板4固定连接,用于对所述旋转机构的各个组件进行承载;所述旋转板8置于所述承载柱10的另一端,并与所述承载柱10轴接固定,具有绕与所述承载柱10的连接点进行全方位转动的灵活度;所述叠层固定机构9置于所述旋转板8工作面表面,并与所述旋转板8固定连接,具有跟随所述旋转
板8的转动而转动的灵活度;在后期的层压作业过程中,可通过所述旋转板8的转动带动所述叠层固定机构9的转动,进而完成对叠层板的更换和依次层压作业。
29.进一步优选的实施方式中,所述旋转板8表面每隔预定距离处设有通孔,所述叠层固定机构9置于所述旋转板8表面的通孔内,并与所述旋转板8卡位连接固定;且所述基板4表面设有与所述旋转板8表面的通孔尺寸相对应的通孔,所述按压机构5置于与所述基板4表面通孔位置相对应处,使得在后期的层压作业过程中所述按压机构5可通过所述基板4表面的通孔对所述传送履带6表面的电路板进行层压作业。
30.进一步优选的实施方式中,所述叠层固定机构9包括套板901和伸缩板902两个部分。所述套板901置于所述旋转板8工作面表面的通孔内,并于所述旋转板8卡位连接固定;所述伸缩板902置于所述套板901靠近所述基板4的一面的表面,且一端与所述套板901固定连接,具有沿与所述传送履带6垂直方向进行往复伸缩的灵活度;在后期的层压作业过程中,所述伸缩板902可展开为掉落的叠层板进行方向和位置的限定和指引。
31.进一步优选的实施方式中,所述按压机构5包括定位柱501、调节柱502和施压装置三个部分。所述定位柱501置于所述旋转板8的一侧,且一端与所述基板4固定连接,用于对所述按压机构5的整体位置进行定位和限定;所述调节柱502置于所述定位柱501的另一端,并于所述定位柱501固定连接,用于所述按压机构5的整体高度调节;所述施压装置置于所述调节柱502的表面,并与所述调节柱502固定连接,用于对电路板进行层压作业。所述定位柱501进一步与所述基板4为滑动连接固定,具有沿所述基板4的表面进行往复滑动的灵活度;在后期的层压作业过程中,所述定位柱501可通过在所述基板4表面的往复滑动带动所述调节柱502和所述施压装置的移动,进而完成对所述按压机构5的作业位置进行调整。
32.进一步优选的实施方式中,所述施压装置包括衔接板503、调节板504、滑动板505和按压桶606四个部分。所述衔接板503置于所述调节柱502的表面,且一面与所述调节柱502滑动连接固定,具有沿所述调节柱502表面进行往复滑动的灵活度,用于所述施压装置与所述调节柱502之间的相互衔接;所述调节板504置于所述衔接板503的另一面,且一端与所述衔接板503固定连接,具有沿所述调节板504的工作方向进行伸缩调节的灵活度;所述滑动板505置于所述调节板504的另一端,并与所述调节板504固定连接,用于对所述施压装置的施压位置进行调节;所述按压桶606置于所述滑动板505的工作面表面,且一面与所述滑动板505固定连接,具有沿所述滑动板505表面进行往复滑动的灵活度,所述按压桶606靠近所述基板4的一端设有红外扫描组件,用于对需要进行层压作业的电路板表面进行扫描成像分析。
33.进一步优选的实施方式中,所述套板901的工作面表面设有具有预定收容性的开放式通孔,所述通孔内设有一端与所述套板901固定连接的伸缩挡板,具有在所述套板901的开放式通孔内进行往复伸缩的灵活度;所述按压桶606靠近所述基板4的一端处设有与所述套板901工作面表面的开放式通孔相适配的延伸按压板,具有沿与所述套板901垂直方向进行往复伸缩的灵活度;且所述套板901内部设有微重感应器,用于对放置于所述套板901上的叠层板进行称重。
34.在上述基于物联网的电路板用层压机器人的基础之上,本发明提出一种基于物联网的电路板层压机器人的层压方法,具体步骤如下:首先,人工把需要进行层压的电路板依次放置于传送履带6表面的固定组件7上,
并通过对固定板701和挤压板702的调节,完成对电路板的挤压固定,启动传送履带6对电路板进行传送。
35.接着,人工把需要进行叠层的叠层板按顺序依次放置于套板901表面,旋转板8启动,开始进行旋转;当套板901旋转置于按压组件相对应位置处时停止转动;按压桶606对套板901表面的叠层板进行扫描,同时套板901对叠层板的重量进行称重,并将称重扫描分析后的数据传送至按压桶606,对按压桶606的下压力度进行调节。
36.随后,传送履带6将电路板传送至与基板4表面通孔相对应处时停止传送;按压桶606压滑动板505表面向靠近套板901的方向移动,移动至与叠层板相接触时,伸缩挡板收起,伸缩板902展开,延伸按压板展开,叠层板沿伸缩板902下落,延伸按压板将叠层板按压至电路板表面;最后,按压完毕后,延伸按压板收回,伸缩板902收回,伸缩挡板展开,按压桶606向远离套板901的方向移动;以此类推,依次重复上述工作步骤,直到所要进行层压作业的电路板全部层压完毕为止。
37.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。