技术特征:
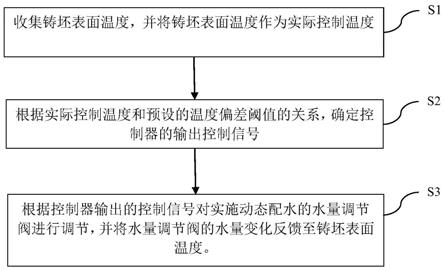
1.一种连铸动态二冷控制方法,包括以下步骤:收集铸坯表面温度,并将所述铸坯表面温度作为实际控制温度;根据所述实际控制温度和预设的温度偏差阈值的关系,确定控制器的输出控制信号;其中,所述温度偏差阈值根据拉速集合确定,所述实际控制温度和预设的温度偏差阈值的关系通过判断公式error(t)≥eomax(t)确定,其中,error(t)为温度偏差,eomax(t)为温度偏差阈值,所述温度偏差为所述实际控制温度与系统预设温度值的差值;其中,预先设定所述控制器调节次数为n,当所述判断公式满足error(t)≥eomax(t)时,所述控制器开始计算反馈调节次数,当所述反馈调节次数到达预设调节次数n时,若仍然符合所述判断公式的条件,记录二冷各区温度偏差,构造新目标温度;根据所述控制器输出的控制信号对实施动态配水的水量调节阀进行调节,并将所述水量调节阀的水量变化反馈至所述铸坯表面温度。2.如权利要求1所述的连铸动态二冷控制方法,所述新目标温度为在系统内引进一个早期修正信号,在控制系统内部的表示水量变化的偏差值δew超过系统预设值之前,预先对所述水量变化预修正,以减少所述控制器在达到所述系统预设值时对所述水量变化的调节时间;其中,所述早期修正信号为水量变化信号。3.如权利要求1所述的连铸动态二冷控制方法,其中,所述拉速集合v=[v1,v2,...,vi,vi 1,...,vn];其中,v为拉速集合,v1为拉速工作范围内第一个测试点的速度,v2为拉速工作范围内第二个测试点的速度,vi为拉速工作范围内第i个测试点的速度,vn为拉速工作范围内末尾测试点的速度。4.如权利要求2所述的连铸动态二冷控制方法,其中,在所述新目标温度tgn应用前在预设目标温度集合中查询所述新目标温度tgn数值是否在所述预设目标温度集合中,在符合所述预设目标温度集合的条件下,将tgn作为新目标温度,实现动态配水控制;在不符合所述预设目标温度集合的条件下,改变控制系统中一项变量,继续进行反馈计算,直至所述新目标温度tgn在所述预设目标温度集合内;其中,所述变量包括水量、拉速。5.如权利要求4所述的连铸动态二冷控制方法,所述预设目标温度集合包括二冷各区出口的目标温度曲线;所述预设目标温度集合为ttg=[tg1,tg2,...,tgi,tgj,...,tgn],其中,tg为所述目标温度曲线,tg1为二冷一区的目标温度曲线,tg2为二冷二区的目标温度曲线,tgi和tgj分别为二冷i区和二冷j区的目标温度曲线,tgn为二冷末区的目标温度曲线。6.如权利要求5所述的连铸动态二冷控制方法,其中,所述目标温度曲线中的目标温度通过二冷区总温度梯度、各区温度梯度、矫直温度、二冷区末端温度共同确定。7.如权利要求6所述的连铸动态二冷控制方法,其中,所述目标温度的确定还依据基本冶金准则,所述基本冶金准则包括温降准则、回温准则、矫直准则;所述温降准则的温度范围为150-200℃/m;所述回温准则的温度范围为80-100℃/m;
所述矫直准则的温度至少为900℃。8.如权利要求5所述的连铸动态二冷控制方法,所述控制器根据设定点温度与目标温度的偏差error(t)控制二冷各区冷却水量;其中,error(t)=tcc-tg,其中,tcc为设定点温度,tg为目标温度。9.如权利要求8所述的连铸动态二冷控制方法,所述控制器根据error(t)输出控制信号u(t)至所述二冷各区的水量调节阀控制所述冷却水量的变化量;冷却水量的变化量公式为:δw=u(t)*wt;式中u(t)为所述控制器输出的控制信号,wt为二冷各区的水量调节阀预先设定的当量调整水量;其中,所述wt的范围为3-10(l/min),并且,所述wt的范围根据冷却区的长度确定。10.如权利要求2所述的连铸动态二冷控制方法,其中,所述控制器的算法公式通过引入可调节温度偏差参数eo(t),与所述温度偏差做对比进行算法的处理,所述算法公式为,当abs{error(t)}≤eo(t),error(t)=0;当abs{error(t)}>eo(t),error(t)=error(t);式中,error(t)为设定点温度与目标温度的偏差,eo(t)为可调节温度偏差参数。
技术总结
本发明提供了一种连铸动态二冷控制方法,包括以下步骤:收集铸坯表面温度,并将所述铸坯表面温度作为实际控制温度;根据所述实际控制温度和预设的温度偏差阈值的关系,确定控制器的输出控制信号;其中,所述温度偏差阈值根据拉速集合确定,所述实际控制温度和预设的温度偏差阈值的关系通过判断公式确定;根据所述控制器输出的控制信号对水量调节阀进行调节,并将所述水量调节阀的水量变化反馈至所述铸坯表面温度。本发明提供了一种连铸动态二冷控制方法,通过PID控制器算法,在判断公式和算法公式双判断标准的条件下,解决在线目标温度的闭环控制系统出现振荡,无法实现稳定控制,严重时控制阀反复振荡,出现失灵,系统出现超差报警的问题。报警的问题。报警的问题。
技术研发人员:陈志凌
受保护的技术使用者:中冶南方连铸技术工程有限责任公司
技术研发日:2021.10.29
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。