用于感测磁性材料变形的系统和方法及其制造方法
1.对相关申请的交叉引用
2.根据35 u.s.c.
§
119,本技术要求2019年6月21日提交的第62/864,766号临时申请的权益,所述临时申请以引用的方式并入本文。
3.关于联邦赞助的研究的申明
4.根据海军研究所有颁发的n00014-16-1-2301,本发明在政府支持下完成。政府对本发明享有一定权利。
背景技术:
5.本公开的技术大体上涉及感测。更具体地,本发明涉及软测量,所述软测量使用磁性材料的变形来提供关于其所处环境的反馈。
6.可穿戴技术、软机器人和人机交互的持续发展使人们对传感器愈发感兴趣。使用这些技术时,不能准确确定物体位置会影响执行某些功能的能力。例如,对于机器人系统,不准确性会妨碍机器人定位和操作工具或其他物体。基于视觉的感测擅长发现工作区域中的物体,但无法提供距离目标物体1至2厘米内的引导。另外,如果摄像头被遮挡或表面是反光的或透明的,基于视觉的系统也会性能不佳。
7.为了克服基于视觉系统的局限性,触觉传感器通过测量接触力来提供有关触觉传感器周围环境的关键信息。由于触觉传感器基于触摸,其只在接触到物体后提供信息,且不能协助接近目标物体。软触觉传感器是触觉传感器的子类,其在交互表面采用可变形且柔顺的材料。软传感器不仅提供丰富的环境信息,还提供有效的机械特性,从而实现成功的机器人操纵、人机交互和材料分类。软触觉传感器可以使用多种转换模式,例如光学式、电阻式和电容式。尽管软触觉传感器提供的精确度会比基于视觉的传感器所提供的精确度更高,但由于制造技术不可扩展、缺乏个性华定制功能且集成要求复杂,软传感器的广泛实施仍受到限制。例如,使用电阻式或电容式软传感器时,每个单元的密度增加与布线中难以管理的缩放和不牢固的软-硬电气接口故障有关。另外,与其他触觉传感器一样,软触觉传感器仅在接触到物体时立即提供信息。
8.磁感应能克服若干这些阻碍,因为磁感应对直接电线的依赖有限,其是通过测量磁通量或电磁感应的变化来提供高分辨率、高速感测。另外,在某些应用中,磁感应可以在接触之前提供传感器输出。尽管与其他类型的传感器相比有这些改进,但磁传感器容易受到环境磁噪声的影响。此外,当实施为软传感器时,在刚性磁体与用于传感器的软弹性体之间的接合处可能发生材料故障,从而将技术限制于非软感测应用。例如,普通磁传感器将霍尔效应感测芯片与悬浮在两个弹性体层之间的离散永磁体结合。因此开发这样的能克服这些限制,以提供用于单点接触定位的触觉表面,并在自由空间中提供快速定位和力估计的感测系统是有利的。
技术实现要素:
9.具体实施方式中公开的方面包括软传感器、用于感测磁性材料变形的方法及其制
造方法。还公开了相关方法和系统。
10.在至少一个非限制性实施例中,提供一种软磁传感器,所述软磁传感器包括软材料和磁力计,所述软材料含有随机分布的磁性微粒,所述磁力计能够在连续区域上估计力和定位接触。在一个示例中,传感器覆盖大约15至40mm2的连续区域。在本文讨论的一些实施例中,使用对来自磁力计的输出进行数据分析的集成电路来估计力和定位的接触。在一些实施例中,磁性材料或“皮肤”由装载有磁性微粒的硅酮弹性体组成。在弹性体变形时,一部分嵌入的磁性粒子会改变其相对于磁力计的位置和/或定向,从而导致净测量所得的磁场变化。在一个实施例中,磁力计可嵌入磁性材料中以形成集成传感器。在替代实施例中,磁性材料和磁力计是分开的。分析磁力计接收到的磁场数据,为力和接触定位提供有用信息。分析磁力计输出的分类算法可以定位压力,精确度》98%。在一些实施例中,回归算法可以将压力定位到平均大约3mm2的区域。在这方面,用于感测例如感测皮肤之类的磁性材料变形的系统和方法能够满足用于例如机器人操纵、软系统和可穿戴设备等领域的传感器对易于制造、快速集成且信息丰富的日益增长的需求。
附图说明
11.图1a-1e示出了传感器的各种实施例。
12.图1f是数据处理步骤的概要图。
13.图2a-2f是描述感测示范结果的一系列图。
14.图3a-3g是描述替代的感测示范结果的一系列图。
15.图4a-4c是根据若干替代实施例的传感器示例。
16.图5是示出了分类和回归结果的一系列图。
17.图6示出了用于机械臂上的示例实施的x和y向量。
18.图7是磁性材料压痕的可视化向量。
19.图8是描述制造技术的流程图。
20.图9是传感器替代实施例,其中磁力计与磁性材料分开。
21.图10示出了另一替代实施例。
具体实施方式
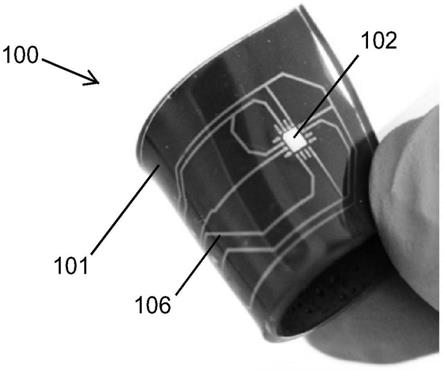
22.在一个示例性实施例中,传感器100包括磁性材料101和磁力计102,所述磁力计102能够感测由材料100变形而产生的磁性材料101的磁场变化。在图1a-1b所示的示例性实施例中,传感器100应用为触觉皮肤,其具有固定的可伸缩三轴磁力计102,所述磁力计被软弹性体103覆盖,所述软弹性体嵌入有磁性微粒104的分散体,从而形成磁性材料101。复合磁性材料101保持主体弹性体103的可伸缩性和柔性,并且与可伸缩电路兼容。在一可替换实施例中,可以使用多个磁力计102(见图1c-1d)。当向传感器100的表面施加变形时,磁性微粒104相对于磁力计102的相对静止位置发生位移。(见图1e)磁力计102测量周围磁场的变化,并分析数据以确定接触的位置和力。磁力计102在x方向、y方向和z方向上测量其周围磁场。遍及整个磁性材料101分布的多个磁性微粒104被视为输入数据,该输入数据最终简化为三轴磁场测量值,以保留有关于材料101的变形的信息。也可以通过材料101自身固有的降维来采用形态学计算。例如,传感器100可以采用形态学计算性质,以在分析之前固有
地降低输出的维度,因此不再需要底层微电子芯片和布线的密集阵列。
23.与分立永磁体或其他常规磁体相比,磁性材料101的总磁力强度更小。但是信号幅值仍足以定位接触位置并估计传感器100表面上的力。此外,将微粒104结合到弹性体103中使得传感器100在形状、尺寸或厚度上具有很少的限制。由于它不像某些磁传感器那样需要多层成型工艺,其制造过程也得到简化。
24.再次参考图1c-1d,其示出了具有多个磁力计102的传感器100,其中一个磁力计102被识别为参考磁力计105。在图1c-1d所示的实施例中,五个磁力计102被定位于临近磁性材料101的位置,而参考磁力计105则位于距磁性材料101一定距离处。在此特定示例中,五个磁力计102相距15mm,其是距离最近的磁力计102无法再检测到磁性材料101的信号之前的范围。每个15mm范围与另一个磁力计的范围重叠2.5mm,以使得功能表面积(function surface area)最大化以及所需磁力计102的数量最小化。参考磁力计105被用作用于测量与磁性材料101不同的磁信号(即,环境磁场噪声)的参考。利用多个磁力计102和单独的参考磁力计105,传感器100能够过滤环境磁场噪声和运动,并且能够融入输出的数据分析,以处理系统的非线性增加。换句话说,参考磁力计105与主磁力计102组合的信号隔离了由于磁性材料101变形而引起的磁通量的变化。评估磁通量信号,以提供对力和位置的实时估计。
25.在图1c-1d所示的示例性实施例中,可通过经过训练的神经网络来评估信号,以提供对于传感器100上的接触的力和位置的估计。图1f是用于接触定位和力的估计的预处理步骤示意图。在这些预处理步骤中,原始磁力计值得以单独校准,从参考信号中变换、过滤,并针对神经网络输入进行按比例缩放。
26.更详细地,在一个实施例中,信号处理结合了校准和预处理,以使得必要的数据收集量最小化,同时保持神经网络输入仅限于原始磁力计数据。每个磁力计102输出关于其周围磁场的三轴数据。针对于由图1-2所示出的实施例,对于每个样本,六个磁力计102、105呈现为共18个数据点。对于预校准的磁力计102、105(其提供偏移和缩放比例),这些参数可应用于原始数据,以单独校准信号。偏移可以通过每个方向上最大和最小信号之间的平均值来确定。缩放比例可以通过用所有三个方向的平均弧长除以每个方向的平均弧长来确定。接下来,将参考磁力计105的仿射变换应用到五个磁力计102上。如果参考磁力计105相对于其他磁力计102保持固定,这一变换允许由于位置和环境噪声而去除运动和环境噪声。噪声去除允许在一个平面上进行数据采集。在校准和过滤数据后,通过去除平均值并缩放到由训练数据确定的单位方差,来为神经网络输入准备数据。虽然此系统提供有用的信息,但其容易受多磁力计102、105系统中存在的额外噪声的影响。因此,可使用在sklearn中利用mlprepressor实现的多层感知机。
27.与使用大型刚性磁体的常规技术相比,可包括磁性ne-fe-b微粒或纳米粒子的磁性微粒104的直径约为200μm或更小。尽管如此,根据预期的应用,只要复合磁性材料101保持一定程度的可伸缩性或柔软性,就可以使用不同尺寸和形状的粒子104。根据预期的应用和所用磁性粒子104的数量,复合磁性材料101可具有与用于形成复合材料101的弹性体103相同或相类似的特性。另外,当向磁性材料101施加机械负载时,使用微尺度磁性粒子104可以降低内应力集中的强度,并且还使材料101具有柔性和/或可伸缩性。例如,当将大型磁体嵌入弹性体中时,由于硬磁体和软弹性体之间的顺应性差异,这两种材料之间的分界面可
能在机械负载下发生分层。此外,此类实施例能实现薄的几何体和/或包含尖锐的3d几何体。
28.在一个实施例中,传感器100在以下制造工艺中形成(参见图8)。首先,将硅酮弹性体103与磁性微粒104混合,并在磁场下固化复合材料,从而使磁性材料101功能化。将材料在磁场中固化,以便将磁性微粒104在嵌入到固化的弹性体103之前对准,从而产生磁性微粒104的均匀磁定向。在可替换的实施例中,使用不均匀磁定向。作为进一步的示例,可以按1:1的比例剪切混合预聚物和交联剂约30秒。预固化弹性体混合物可以按1:1的重量比与磁性粒子104(mqp-15-12;magnequench)手动混合,从而形成磁性材料101。然后,将未固化的磁性材料101倒入模具中,并脱气5分钟。可在模具顶部放置薄塑料膜,并且可排出过量的材料101。然后,可填充模具,再将其倒置于永磁体(n48;applied magnets)的表面上。接着,材料101可在室温下固化,并在一小时内从模具中取出。最后,可将磁性材料101粘附(silpoxy;smooth-on)到商用磁力计102的板(例如mlx90393;sparkfun)顶部。在可替换的实施例中,将聚氨酯泡沫用作弹性体103;然而,本领域技术人员将会理解:可以使用几种类型的弹性体103。在又一可替换的实施例中,可将聚合物之外的可变形材料用作复合磁性材料101的衬底。
29.关于可伸缩电路106的设计和制造,可伸缩电路106可包括磁力计102(mlx90393;melexis)和五条输出线(图1b)。对于第二条3.3伏线,可使用额外输出线,由于可伸缩电路106的单层设计,这可能是有用的。在pdms(sylgard 184;dow corning)表面溅射薄薄一层铜和铬,并用激光绘图,以留下电路痕迹。在浸泡于naoh溶液中时,共晶镓铟(egain)选择性地润湿剩余的铜痕迹。然后,可以将电路组件106直接放置在液态金属痕迹之上,并用额外的pdms层密封。
30.举例来说,以这种方式构成的传感器100能够收集由磁性材料101的变形和源自材料101的磁场变化所产生的数据,例如压力数据,这些数据由磁力计102感测。在一些实施例中,由于可能产生独特磁场的磁性材料101内的粒子104的不均匀分布,可使用数据驱动技术,以对磁性材料101上发生的变形的位置进行分类,并估计此变形的深度。具体地,例如,对于3mm分辨率的5
×
5网格以及具有3个离散深度的5mm径向圆,对定位进行分类具有98%的精确度。回归算法可以将接触定位到3mm2的区域。在这方面,本文公开的一些实施例提供了一种方法,能解决对连续且柔软的触觉表面的需求,这种表面易于制造、可快速集成且可适应几何结构。
31.作为位置感测的示范,对于包含5
×
5网格的实施例,在3mm分辨率的5
×
5网格上收集力和磁场变化,直至3mm深度(见图2a),总共25个类别。使用均匀随机分布,在这25个位置收集了2750个接触样本。每个类别(总共25个类别)包括大约100个样本。
32.几种不同的分类算法能够准确区分25个位置,如下所示。在这方面,本文讨论了使用二次判别分析(qda)的分类结果,以说明各个方面的性能。在分类错误的情况下,预测的类别与真实位置相邻(见图2b,位置13的qda分类)。图2c示出每个位置的分类精确度(所有qda分类结果按类别分组)。图2d-2e分别示出按x位置、y位置的位置进行线性回归分组所产生的平均绝对误差,以及力的knn回归产生的平均绝对误差。
33.为了估计位置,将25个离散位置转换为其坐标位置。对于5
×
5网格和线性回归实验,x位置的平均误差为1.1mm,y位置的平均误差为3.8mm。传感器边缘附近的输出估计可能
具有较低的精度和较高的标准偏差。由于磁信号与距离的关系为1/d3,信号质量预计会随着距离的增加而降低。在沿着边缘的这些点上,粒子的随机分布可能开始对输出信号产生比所施加的变形更大的影响。这可能导致异常的信号变化,也可能是在某些非限制性实施例中数据驱动技术比函数拟合方法更有用的原因。
34.作为位置和深度感测的示范,对于包括圆传感器100的实施例,针对8个不同的xy位置和3个不同深度(dz=1、2或3mm)测量了磁场的受力控制的变化(参见图3a)。使用均匀随机分布,为这24个xyz位置收集了2850个接触样本。每个类别(总共24个类别)约有110个样本。如图所示,可使用二次判别分析(qda)基于xy位置和深度对位置进行分类。如果预测类别错误,可将其预测为相邻类别(参见见图3b,针对于位置3和1mm深度的qda分类结果)。相邻位置之间的错误分类可能比相邻深度之间的错误分类更常见。可使用z轴磁场与压力之间较大的相关性来区分深度。由于与5
×
5实验相比所有测试位置都更靠近磁力计102,因此可能不会察觉到从微粒104引入的同样的噪声,或者该噪声可能不存在。针对于每个位置的分类精确度如图3c所示。通常,施加的压力越小(深度=1),信号变化就越小,精确度越低。对于此样本,位置3和深度1的分类具有较低的精确度。这可能归因于结合了导致右侧信号较小的偏移,这在图3d(对于x位置,按位置分组的线性回归输出的平均绝对误差)和图3e(y位置)中也明显可见位置2、3和4的较大误差。图3f示出z位置的平均绝对误差,图3g示出按力位置分组的knn回归的平均绝对误差。
35.继续参考上述示范,将24个类别转换为其真实坐标(x,y,z),以进行位置估计。对于8点圆和线性回归,在所有类别中,x位置的平均绝对误差为1.2mm,y位置的平均绝对误差为3.4mm。x和y坐标之间的误差差异可能意味着在这一测试中存在的细微的未对准,图3d和3e中的位置误差变化也证明了这一点。z位置误差相对较小(0.03mm),可能是由于与1mm深度变化相关的信号变化较大(图3f)。
36.为了估计力,可以使用时间序列数据和k近邻(knn)回归。输入可以是磁场的bx、by和bz分量、磁力计的内部温度bt以及每个时间步的称重传感器输出。对于5
×
5网格的示范,力估算的平均误差为0.44n(图2f)。对于8点圆,力估算的平均误差大约为0.25n(图3g)。磁场的z轴与所施加的压力的相关性最强,使得力的估算相对准确。然而,良好的信号变化可取决于变形量。因此,如果用于磁性材料101的弹性体103具有更高的杨氏模量,则力的分辨率可能更大。两次试验期间施加的力的范围大约在0到2.5n之间,受所选择的最大深度3mm的限制。
37.作为传感器100的能力示范,图4a示出简单的4键方向游戏板。如图4a所示,四个丙烯酸箭头粘附在传感器100的表面上,以帮助用户定位施加压力的位置,以输入方向命令。可以通过磁场的x、y和z分量的变化来识别这四个命令。在此示例中没有使用分类器,取而代之地,当按钮间隔足够大时,简单的阈值设置就足以胜任。x和y的正负变化被映射到键盘上的四个箭头键,以便在网络浏览器中玩“吃豆小姐(ms.pacman)”的游戏。图4a中还示出来自游戏的每一个方向的示例数据。
38.为了示范5
×
5网格分类器的速度和精确度,使用由机器人控制的圆柱压头玩小游戏“扫雷(minesweeper)”,如图4b所示。将25个网格位置中的每一个映射到屏幕上的鼠标位置。信号的长度(即施加压力的持续时间)表明用户是想单击左键以显示方框,还是想单击右键放置一标志。信号返回到静止状态后,立即使用qda分类器预测位置,然后执行适当操
作。原始数据和分类结果如图4b所示。
39.由于传感器100既可伸缩又灵活,因此它可以与现有的可伸缩电路技术相集成。与4键键盘相类似,通过向量阈值,将四个键盘命令(ctrl 左、ctrl 右、ctrl 上、ctrl 下)映射到4个位置(上一曲、下一曲、音量增大、音量减小),以浏览音乐播放列表(图4c)。在不使用丙烯酸箭头的情况下,用户输入的位置可能会有所不同,从而导致数据噪声更大。此外,用户的手和皮肤可能会随着磁性皮肤一起变形。尽管这两个因素都会产生额外噪声,但系统仍可使用约4个基本阈值来起作用,以确定接触象限。
40.在其他实施例中,通过调整传感器100或磁性材料101的制造过程、修改训练程序或添加额外的磁力计102,可增强力和接触位置的范围和分辨率。本文所讨论的传感器100可用于包括软机器人、医疗设备、操纵和触觉表面的应用中。此外,在某些非限制性实施例中,传感器100可以模制成符合主机系统的几何形状的形状,并且可以进行磁编程以响应所规定的机械负载或变形。
41.关于本文所讨论的一些实施例,时间序列数据表示为一组代表性特征。此外,21个特征被手动识别,以代替自动特征选择方法。这21个特征包括样本上每个轴的最小值、最大值、平均值、标准偏差、中值和总和(18个特征),以及三个轴之间的标量比(3个特征)。在接触结束时,根据接触期间收集的数据计算特征,并立即输出分类和回归结果。因此,如本文所讨论的,随机分布的磁性粒子104的变形可以产生可重复且可分离的信号。
42.在分析从磁力计102接收的数据时,使用立方反比关系,预估磁场强度随与磁力计102的距离而衰减:
[0043][0044]
关于方法,对基于python语言的scikit-learn的机器学习工具包中的分类算法进行了评估(关于所有可用分类算法和实现细节的完整比较,请参见图5)。结果包括减少了参数调整定,同时能够使用相对较小数据集成功区分多个类别。使用监督学习算法,监督学习算法不需要大量的超参数调定,且非常适合于多类分类。
[0045]
在这方面,使用了以下分类算法:
[0046]
lda:线性判别分析是一种分类器,其用于在假设每个类别都是具有平均值和相同协方差的多元高斯密度的情况下找到线性判定边界。使用了奇异值分解(svd),没有收缩、先验或降维。
[0047]
qda:类似地,二次判别分析是一种分类器,其用于找到每个类别之间的二次判定边界。每个类别被建模为高斯密度,输出预测是贝叶斯规则最大化的类别。与lda的一个关键区别在于:qda并不假设每个类别都有相同协方差矩阵。
[0048]
knn:k-最近邻分类算法使用间隔某一距离度量的k个最近样本对新输入进行分类。这是对数据进行聚类的常用方法。在本文讨论的一些实验中使用了统一加权、曼哈顿距离(l1范数)和k=5。
[0049]
rf:随机森林分类器对数据集的子样本拟合决策树。通过随机分割数据集,分类器从此子集中选择最佳特征。
[0050]
dt:决策树(dt)分类器创建二叉树,并基于包含最大信息的特征分割节点。在本文讨论的方面中,使用分类回归树(cart)算法来使用决策树。
[0051]
gb:梯度提升(gb)是一种集成分类器,其是将n个回归树拟合到指定损失函数的梯度。在本文讨论的某些方面中,使用了100个估计量、偏差损失和0.1的学习率。
[0052]
关于回归算法,选择以下回归算法来估算xy坐标位置。参考上文讨论的一些方面,一些回归算法使用与先前分类相同的特征和样本进行训练的(见图6)。
[0053]
lr:线性回归使用特征作为系数来拟合线,同时使剩余平方和最小化。
[0054]
svr:支持向量回归通过最小化指定的软间隔ε来拟合核函数。此ε间隔内的任何误差均视为零,且从此间隔开始计算l1损耗。在本文讨论的一些情况下,使用ε=0.1和rbf核。
[0055]
dtr:决策树回归器通过构建决策树并基于最大化信息分割节点,以遵循与决策树分类相同的原则。然而,在此回归器中,输出是连续的。
[0056]
knn回归器:knn回归器通过使用连续距离函数的加权平均值,将knn分类方案扩展为连续输出。
[0057]
关于本文讨论的5
×
5网格的示范,几种算法能够以98%的精确度区分25个类别。值得注意的是,与其他算法相比,qda需要更多的样本才能达到这一精确度。这可能是由于前1000个样本没有捕获特征中的差异。lda分类的精确度随着样本量的增加而降低。这可能意味着特征可能不是线性分离的,因为更多的样本会增加噪声。可增加这些特征的空间,使它们更易于线性分离。
[0058]
对于8点圆示范,有几种算法能够区分24个类别。一般来说,基于决策树的方法表现良好。与5
×
5网格结果类似,qda在实现与cart、rf和gboost方法类似的性能之前需要更多的样本。knn在这些情况下也表现良好。这可能归因于z方向磁场按幅度划分类别[0,7]、[8,15]和[16,23]。这使得集群可以很快将问题减少到8个选项。因为圆半径小于5
×
5网格,从所以先前讨论的材质粒子分布中看不到相同的噪声。
[0059]
线性回归算法(线性、岭、套索、弹性)均具有连续输出,其可估算平均误差约为1.1mm的x位置和平均误差约为2.5mm的y位置。knn和dt结果可能受数据输入的准离散性质影响,从而产生准离散输出。然而,可以在整个表面上使用连续采样。
[0060]
关于5
×
5网格的原始向量,磁力计102可具有内部坐标系,所述坐标系可由输出向量的大小和方向确定。例如,磁力计102的x轴在图6中交叉,输出可以从负变为正。信号周围的每个象限可以基于其位置反映正确的符号,且信号幅度随着与磁力计102的距离而减小。然而,在网格实验的边缘可能会出现来自此模式的一些差异。
[0061]
在图7中,以10mm/min对25个位置上3mm压痕的网格模式的每个位置绘制最大bx和bt向量。在图7中,差异用星号标记。应注意到,内部9个位置信号相对于边缘位置的很大,框中未示出完整向量。然而,很明显地,内部9个位置遵循磁力计102的x轴和y轴预期符号。具体地,当穿过y轴时,x向量从左到右遵循(正、负、负)模式。类似地,当穿过x轴时,y向量从上到下遵循(负、正、正)模式。这些模式是预期的,且遵循近似理论。
[0062]
边缘情况略有不同。例如,考虑位置15和20中的x向量(红色)。虽然它们位于x轴的负侧(由中心9个位置示出),但信号为正。这种差异仅出现在边缘位置。可能归因于样本的不一致性胜过了在距离磁力计102此距离处施加的变形。由于立方反比关系,信号会随距离增大而迅速衰减。换句话说,压头下聚合粒子的位移对净磁场变化的影响大于整体位移。在位置20和24的y向量(绿色)中可以看到类似的效果,这里的信号应该为正,但实际上相对较小且为负。与基于模型的技术相比,这些相对不可预测的差异可以激发数据驱动技术的使
用。
[0063]
在其他非限制性实施例中,磁力计102可用于在操作期间相对于复合磁性材料101移动时感测复合磁性材料101的变形。例如,在至少一个非限制性实施例中,复合磁性材料101可位于机械臂的夹持器或机械手上,而磁力计102位于机械臂的另一部分上,例如肘部、肩部、底座或其他位置上。在此类示例性实施例的操作过程中,夹持器或机械手可与机械臂的其他方面(包括包含磁力计102的方面)同时移动,从而使复合磁性材料101和磁力计102相对于彼此移动。在这方面,磁力计102可用于在操作期间四处移动时感测复合磁性材料101的变形。在其他实施例中,磁力计102可与机械臂或连接到复合磁性材料的其他装置位于不同位置,例如位于将由机械臂操纵的物体上。
[0064]
在图9所示的实施例中,磁性材料101附接到钥匙上,其中磁力计102是机器人夹持器的一部分。机器人夹持器内的磁力计102可以以毫米级总和(sum-mm)的精确度定位到钥匙上的磁性材料101,并使机器人能够每次以相同的方式在相同的位置拾取物体。此外,即使在接触之前,机器人也能始终定位可重复的抓取和物体姿势。磁力计104能实现小尺寸(7
×7×
2mm),提供快速采样频率(》100hz),并且可以通过串行通信轻松集成到系统中。
[0065]
图10描绘了传感器100的可替代实施例,其中磁力计102与磁性材料101分离,允许3d定位。通过将磁性材料101与磁力计102分离,机器人能够自由移动,并测量由于运动和变形引起的周围磁通量变化。传感器100可以补充基于视觉物体的定位。在具有分离组件的传感器100的一个示例性实施例中,三轴磁力计102安装在电路板上,所述电路板具有用于sda、scl、3.3v和gnd的四条输入线。这四条线允许磁力计102使用i2c与附接到末端执行器或夹持器的小型微控制器通信。
[0066]
对于图9-10中描绘的传感器100,通过麦克斯韦电磁学方程控制定位和力反馈。对于一些应用,过程可通过将磁性材料101上方的磁场形状估计为2d高斯分布得以简化。利用这一基础,可由磁力计102来确定和测量磁性材料101表面处磁场的z分量。例如,对于2mm的厚度,本示例性实施例中所使用的磁性材料101的范围在3500到4500μt之间,并用作最小二乘拟合的合理界限。
[0067]
随着机器人夹持器和磁力计102经过磁性材料101附近,当遇到最大磁场时记录夹持器的位置。将夹持器移动到此位置会使得磁性材料101在该轴上居中。通过在另一个方向上重复此过程,可以使机器人夹持器在磁性材料101上居中。
[0068]
可替代地,补充的基于视觉的系统将能够在磁性材料101所附着到的物体附近定位机器人夹持器,但不会有关于扫描方向的信息。在这种情况下,可以在任何方向上执行短距离扫描,并通过非线性最小二乘优化将1d高斯分布拟合到数据点。然后可以针对第二轴重复此过程。通过执行这些步骤,可以将机器人夹持器定位在高斯分布估计的峰值处。一旦包含磁力计102的机械夹持器定位到中心轴,就可以使用麦克斯韦方程来估计磁性材料101表面的位置。然后,可以递进移动机器人夹持器以接近磁性材料101表面。
[0069]
在额外的实施例中,系统可在任意数量的位置包括多个磁力计,以感测复合磁性材料101中的一个或多个变形。在又一实施例中,多个磁性粒子104可包括例如氖(ne)、铁(fe)、硼(b)、钕(nd)、钐(sm)、钴(co)等材料及其任何适当的组合。此外,在一些非限制性实施例中,多个磁性粒子包括微粒,包括尺寸在10-7.5
米到10-4.5
米范围内的粒子以及尺寸在0.5μm(微米)到0.5mm(毫米)范围内的粒子,和/或包括纳米粒子,包括尺寸小于700nm(纳
米)的粒子。
[0070]
以上说明书或所附权利要求书或说明书附图中公开的,以其特定形式或根据用于履行所公开的功能的方式或根据用于实现所公开结果的方法或过程表达的特征,视情况可单独地或以这类特征的任何组合,用于以多种形式实现本发明。具体地,本文所描述的任何实施例中的一个或多个特征可以与本文描述的任何其他实施例中的一个或多个特征组合。
[0071]
还可以为结合本公开,以引用的方式引用和/或并入的任何一个或多个公开文件中公开的任何特征寻求保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。