1.本发明涉及到工程机械无人驾驶技术领域,主要解决碾压机的智能无人驾驶问题,确切说是一种无人驾驶碾压机。
背景技术:
2.随着无人驾驶技术的快速发展,无人碾压机开始在基础设施、能源、水利、公路沥青混凝土路面工程中投入使用。众多工程机械中的碾压机的工作特点是重复性、规律性、工作环境单一性,操作较简单,操作人员易疲劳,操作环境对作业人员健康影响较大。又特别是公路沥青混凝土路面碾压过程,因刚摊铺的沥青混合料温度高达130-160度左右,在炎热的夏天进行沥青混凝土路面碾压作业,碾压机操作人员要面对恶劣的施工环境,承受上烤下蒸的高温考验,很多碾压机操作人员干不了几年都要纷纷要求转行。因此,开发无人驾驶新能源碾压机很有必要。
3.当前,在相对固定的水电大坝施工现场,对土石方或水泥混合料的碾压施工,已经有单钢轮的无人驾驶新能源碾压机完成实验性的开发。然而,对不断延伸的公路沥青混凝土路面的碾压,需要多台双钢轮和胶轮碾压机协调作业的无人驾驶技术,难度更大、要求精度更高。
技术实现要素:
4.为了解决上述技术难题,本发明的目的在于提供一种无人驾驶新能源碾压机,是通过在碾压机上设置避障装置、温度传感器、激光测距感知装置;安装卫星定位装置、微波信号机、信号发送装置;在行车/倒车系统上安装自动控制装置,在油路系统上设置有油路自动控制装置;在转向系统上设置有转向控制电机和电子阀装置等技术手段;然后通过工业控制计算机内设置的处理器、程序软件、交换机等组件来实现碾压机的自动运行,最终达到碾压机全智能化无人驾驶,在公路沥青混凝土路面碾压施工中广泛应用的目的。为了实现上述目的,本发明通过下述技术方案实现:
5.一种无人驾驶新能源碾压机,包括在碾压机上设置的感知系统、通讯系统、控制系统,其特征在于:所述感知系统包括避障装置、温度传感器、激光测距装置、惯性导航装置;所述避障装置包括毫米波避障装置、激光避障装置;所述通讯系统包括在碾压机上顶部设置的gps/bds卫星定位装置、微波信号机、信号发送装置;所述控制系统包括工业控制计算机;
6.所述感知系统,是通过在碾压机前后车轮上设置多只毫米波避障装置、激光避障装置,在碾压机前后车架上设置温度传感器,在碾压机前后车轮的左右侧设置多只激光测距感知装置,在碾压机车顶上设置惯性导航装置;通过专用线路将上述装置与工业控制计算机连接;
7.所述通讯系统,是通过在碾压机上顶部设置有gps/bds卫星定位装置、微波信号机、信号发送装置;由所述的gps/bds卫星定位装置、微波信号机、信号发送装置构成远程控
制系统;所述的gps/bds卫星定位装置、微波信号机、信号发送装置分别通过专用线路与碾压机上的工业控制计算机连接;
8.所述控制系统,是通过在碾压机上设置有计算机控制中心,在计算机控制中心内设置有工业控制计算机,计算机包括硬盘、处理器、pcb、交换机、gps/bdss卫星芯片及系统控制软件。
9.在所述的碾压机的行车/倒车系统上设置有行车/倒车自动控制装置;在油路系统上设置有油路自动控制装置;在转向系统上设置有转向控制电机和电子阀装置;在制动系统上设置有制动控制装置。
10.在所述的碾压机上设置有手动/自动切换按钮、紧急制动按钮。
11.在所述的碾压机机架底部设置有转向角测量装置。
12.本发明的有益效果主要表现在以下方面:
13.一、本发明提供的一种无人驾驶新能源碾压机,是通过在碾压机上设置避障装置、温度传感器、激光测距感知装置;实现碾压机运行过程中对现场障碍物、地面温度的实时探测,为碾压机运行提供基础数据。
14.二、本发明提供的一种无人驾驶新能源碾压机,是通过在碾压机上安装卫星定位装置、微波信号机、信号发送装置;实现碾压机的实时定位及实时通讯,为控制碾压机提供条件。
15.三、本发明提供的一种无人驾驶新能源碾压机,是通过在行车/倒车系统上安装自动控制装置,在油路系统上设置有油路自动控制装置;在转向系统上设置有转向控制电机和电子阀装置等技术手段;实现碾压机的智能化行驶。
16.四、本发明提供的一种无人驾驶新能源碾压机,是通过工业控制计算机内设置的处理器、程序软件、交换机等组件,来指挥碾压机的程序化运行,达到碾压机全智能化无人驾驶,最终满足沥青混凝土路面碾压施工要求的目的。
附图说明
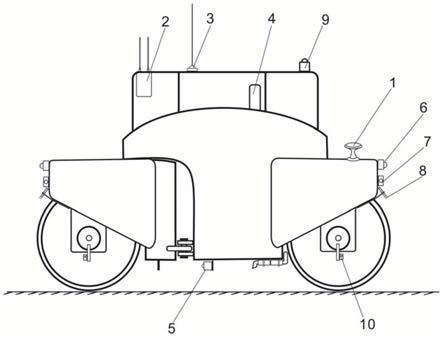
17.图1为无人驾驶新能源碾压机主视图;
18.图2为无人驾驶新能源碾压机侧视图。
19.图中标记:1为gps/bds卫星定位装置,2为微波信号机,3为信号发送装置,4为计算机控制中心,5为转向角测量装置,6为激光避障装置,7为毫米波避障装置,8为温度传感器,9为惯性导航装置,10为激光测距装置。
具体实施方式
20.实施例1:无人驾驶碾压机
21.首先通过碾压机底层计算机,读取碾压机的设备轮胎、电路、油路、燃烧油、润滑油、液压油、转向系统、制动系统、灯光系统、振动系统、喷油装置、水箱水位等数据,保证各项数据处于正常的状态;在正常状态的碾压机上设置无人控制系统;图1、图2所示,一种无人驾驶新能源碾压机,包括在碾压机上设置的感知系统、通讯系统、控制系统,其特征在于:所述感知系统包括避障装置、温度传感器8、激光测距装置10、温度传感器9;所述避障装置包括毫米波避障装置7、激光避障装置6;所述通讯系统包括在碾压机上顶部设置的gps/bds
卫星定位装置1、微波信号机2、信号发送装置3;所述控制系统包括工业控制计算机;
22.所述感知系统,是通过在碾压机前后车轮上设置多只毫米波避障装置7、激光避障装置6,在碾压机前后车架上设置温度传感器8,在碾压机前后车轮的左右侧设置多只激光测距感知装置,在碾压机车顶上设置温度传感器9;通过专用线路将上述装置与工业控制计算机连接;
23.所述通讯系统,是通过在碾压机上顶部设置有gps/bds卫星定位装置1、微波信号机2、信号发送装置3;由所述的gps/bds卫星定位装置1、微波信号机2、信号发送装置3构成远程控制系统;所述的gps/bds卫星定位装置1、微波信号机2、信号发送装置3分别通过专用线路与碾压机上的工业控制计算机连接;
24.所述控制系统,是通过在碾压机上设置有计算机控制中心4,在计算机控制中心4内设置有工业控制计算机,计算机包括硬盘、处理器、pcb、交换机、gps/bdss卫星芯片及系统控制软件。
25.保持gps/bds卫星定位装置1、微波信号机2、信号发送装置3与碾压机上的计算机控制中心4内的工业控制计算机连接通畅;保证电源稳定,保持gps/bds卫星定位装置1、微波信号机2、信号发送装置3不能被遮挡;
26.将摊铺机采集到的数据通过微波通讯天线发送给移动式基准站及碾压控制系统,碾压控制系统根据采集到的数据,结合施工路段道路的宽度设置任务,再生成实时的现场碾压区域发送给各台碾压机上的无人控制系统;通过各台碾压机上的工业控制计算机,按照操作系统设置的施工任务及技术参数实时协调各碾压机配合工作;最终实现碾压机全智能控制的无人驾驶状态。
27.进一步,在所述的碾压机的行车/倒车系统上设置有行车/倒车自动控制装置;在油路系统上设置有油路自动控制装置;在转向系统上设置有转向控制电机和电子阀装置;在制动系统上设置有制动控制装置。
28.按照操作系统设置的施工任务及技术参数实时协调各碾压机配合工作;最终实现钢轮碾压机和胶轮碾压机行车/倒车自动控制、行驶速度自动控制、转向角度自动控制、行走/制动实时控制、发现障碍紧急制动、行车轨迹程序控制、碾压长度程序控制、碾压宽度程序控制、碾压次数程序控制、振动系统自动控制、喷油/喷水作业自动控制等无人智能驾驶状态。
29.进一步,在所述的碾压机上设置有手动/自动切换按钮、紧急制动按钮。手动/自动切换按钮用于适时控制碾压机人工手动驾驶与无人智能驾驶状态的转换;紧急制动按钮,用于碾压机出现意外失控状态下的紧急停机。
30.进一步,在所述的碾压机机架底部设置有转向角测量装置5;适时测量碾压机方向盘的转角。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。