1.本技术涉及煤炭行业综采工作面场景下的巡检机器人应用,尤其涉及一种巡检机器人的底盘与相配合的单轨双梁式轨道。
背景技术:
2.国内许多煤矿应用了可视化远程干预型智能无人化综采,但是综采工作面内仍然需要1名工人进行巡检作业,为了实现综采工作面支架支护区域内真正无人,本系列综采工作面巡检机器人可获取工作面信息,实现工作面数字化透明化,完成对综采工作面巡检人员的替代,并可搭载激光雷达、惯性导航等组件,实现工作面自动找直、三维数字重构等任务。
3.目前在设计巡检机器人的过程中,需要设计一种结构简易、移动灵活、可通过调节来适应轨道高度,且运行保持平稳的底盘结构来应对不同的工作环境,而且还需要设计一种配合该底盘结构的单轨双梁式轨道来满足实际工作需要。
技术实现要素:
4.本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
5.为此,本技术的一方面实施例提出一种巡检机器人的底盘,包括:底盘壳体、轮臂、竖直转动的主动轮和水平转动的辅助轮,若干个主动轮安装于底盘壳体下方,电机驱动主动轮在轨道上端滚动,轮臂设有若干个,连接于底盘壳体下端的左右两边并左右对称分布,每个轮臂均轴连接一个辅助轮,辅助轮贴合于轨道的外侧壁滚动。
6.在一些实施例中,若干个主动轮形成一列,排布于底盘壳体沿轨道方向的中线位置。
7.在一些实施例中,所述轮臂包括固定轮臂和/或可竖直方向调节的可调轮臂。
8.在一些实施例中,所述固定轮臂和可调轮臂均为l形结构,固定轮臂包括相互垂直固定连接的固定侧板和底板,固定侧板的上端固定在底盘壳体下端,底板固定在固定侧板的下端,辅助轮轴连接于底板上端。
9.在一些实施例中,所述可调轮臂包括相互垂直固定连接的可调侧板和底板,可调侧板的上端通过弹性合页连接于底盘壳体下端,可调侧板上方开设有竖直方向的调节孔,弹性合页和可调侧板之间连接有调节螺栓,调节螺栓在调节孔内上下移动,调节到合适位置后锁紧。
10.在一些实施例中,每个可调侧板上对称设有两个调节孔。
11.在一些实施例中,所述主动轮设有2个,固定轮臂和可调轮臂各设有4个。
12.根据本技术第二方面实施例的与上述的巡检机器人的底盘相配合的单轨双梁式轨道,包括通过软连接件连接的若干个轨道单元,每个轨道单元包括相互平行设置的上轨道和下轨道,下轨道设于上轨道的正下方,主动轮在上轨道上端滚动,辅助轮贴合于上轨道和/或下轨道的外侧壁滚动。
13.在一些实施例中,所述上轨道和下轨道的宽度相同。
14.在一些实施例中,所述上轨道和下轨道之间连接有若干个支撑架。
15.本技术实施例的巡检机器人的底盘与相配合的单轨双梁式轨道具备以下有益效果:结构简易,移动灵活,可通过调节辅助轮的高度来适应轨道,运行过程中提高平稳性,防止倾倒侧翻,可根据需要搭载不同的设备。
16.本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
17.本技术上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,
18.其中:
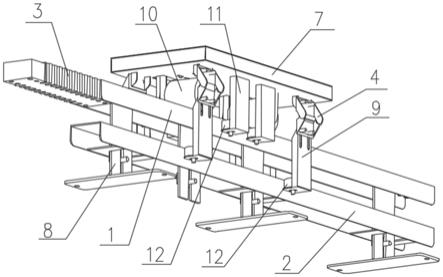
19.图1为本技术实施例所提供的巡检机器人的底盘与单轨双梁式轨道配合使用的结构示意图;
20.图2为图1中固定轮臂的放大示意图;
21.图3为图1中可调轮臂的放大示意图;
22.图4为本技术底盘搭载车体后在单轨双梁式轨道上运行时的示意图;
23.图5为图4的侧视图;
24.附图标记:
25.1-上轨道;2-下轨道;3-软连接件;4-弹性合页;5-车体;6-电机;7-底盘壳体;8-支撑架;9-可调轮臂;91-可调侧板;10-主动轮;11-固定轮臂;111-固定侧板;12-辅助轮;13-传动机构;14-连接板;15-固定螺栓;16-调节螺栓;17-调节孔;18-底板。
具体实施方式
26.下面详细描述本技术的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
27.下面参考附图1-5描述本技术实施例的一种巡检机器人的底盘与相配合的单轨双梁式轨道。
28.本技术的一方面实施例提出一种巡检机器人的底盘,如图1所示,包括:底盘壳体7、轮臂、竖直转动的主动轮10和水平转动的辅助轮12,若干个主动轮10安装于底盘壳体7下方,电机6通过传动机构13驱动主动轮10在轨道上端滚动,轮臂设有若干个,连接于底盘壳体7下端的左右两边并左右对称分布,每个轮臂均轴连接一个辅助轮12,辅助轮12贴合于轨道的外侧壁滚动。
29.在一些实施例中,若干个主动轮10形成一列,排布于底盘壳体7沿轨道方向的中线位置。
30.在一些实施例中,所述轮臂包括固定轮臂11和/或可竖直方向调节的可调轮臂9。
31.在一些实施例中,如图2所示,所述固定轮臂11和可调轮臂9均为l形结构,固定轮臂11包括相互垂直固定连接的固定侧板111和底板18,固定侧板111的上端固定在底盘壳体7下端,底板18固定在固定侧板111的下端,辅助轮12轴连接于底板18上端。
32.在一些实施例中,如图3所示,所述可调轮臂9包括相互垂直固定连接的可调侧板91和底板18,可调侧板91的上端通过弹性合页4连接于底盘壳体7下端,可调侧板91上方开设有竖直方向的调节孔17,弹性合页4和可调侧板91之间连接有调节螺栓16,调节螺栓16在调节孔17内上下移动,调节到合适位置后锁紧。
33.可调轮臂9可调节竖直方向的高度,以适应轨道的高度,保证辅助轮12能够贴合在轨道侧壁上滚动。
34.弹性合页4的下部有朝向轨道内侧的弹力,使得辅助轮12能贴合在轨道侧壁上滚动。
35.在一些实施例中,底盘壳体7下端与弹性合页4之间通过连接板14连接,每个弹性合页4通过固定螺栓15连接在连接板14上。
36.在一些实施例中,每个可调侧板91上对称设有两个调节孔17。
37.在一些实施例中,所述主动轮10设有2个,固定轮臂11和可调轮臂9各设有4个。辅助轮12在轨道两边对称设置,防止小车倾倒侧翻。
38.根据本技术第二方面实施例的与上述的巡检机器人的底盘相配合的单轨双梁式轨道,包括通过软连接件3连接的若干个轨道单元,每个轨道单元包括相互平行设置的上轨道1和下轨道2,下轨道2设于上轨道1的正下方,主动轮10在上轨道1上端滚动,辅助轮12贴合于上轨道1和/或下轨道2的外侧壁滚动。
39.在一些实施例中,所述上轨道1和下轨道2的宽度相同。
40.在一些实施例中,所述上轨道1和下轨道2之间连接有若干个支撑架8。
41.在一些实施例中,弹性合页4可替换为阻尼合页。
42.如图4-5所示,本案的底盘可根据需要搭载不同的车体5,实现不同的功能。
43.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
44.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
45.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
46.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第
一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
47.在本发明中,术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
48.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。