1.本实用新型属于机械制造技术领域,尤其是涉及一种倒圆角自动磨削工装。
背景技术:
2.在钣金件的制造完成后,需要将两个或多个钣金件进行焊接,以组装成完整的钣金产品。生产和焊接过程中不可避免地会产生毛边和焊缝,若不对其毛边和焊缝进行打磨处理,将对将影响后期加工以及使用这的安全。
3.日前,通常采用人工使用角磨机手工完成焊缝和毛边打磨处理,这种打磨方式费时费力,且对加工者的技术要求较高,且采用这种方式打磨效率较低,难以满足现在市场所需的产量和质量。此外,传统的打磨方式适用于平面打磨,无法将棱角打磨呈圆角,存在局限性。
4.为解决上述问题,设计一种倒圆角自动磨削工装是目前本领域技术人员所要解决的重要技术问题。
技术实现要素:
5.本实用新型的目的就是为了解决现有技术中存在的上述问题,提供一种倒圆角自动磨削工装。
6.本实用新型的目的通过以下技术方案来实现:
7.一种倒圆角自动磨削工装,包括壳体,
8.一驱动机构,包括可自转地设置于所述壳体中的电机,以及设置于所述电机的电机轴上并起到减速作用的行星齿轮;
9.一旋转机构,包括绕设在所述电机转轴上的砂带,以及设置在所述砂带内侧并由其驱动旋转的张紧轮;
10.一摆动机构,包括由所述驱动机构驱动的摆动拨叉,以及由所述摆动拨叉带动的摆臂,所述摆臂与所述摆动拨叉同轴并部分重叠设置,且重叠部分设置有连接轴,两者摆动方向相对;所述连接轴位于所述张紧轮的外侧;所述摆臂远离所述摆动拨叉的一端设置有两个与所述砂带内壁贴合的滚轮。
11.优选的,所述摆动拨叉远离所述连接轴的一端经过所述电机,并通过第一固定轴连接于所述壳体内,所述摆动拨叉绕所述第一固定轴处摆动。
12.优选的,所述行星齿轮上偏心设置有偏心轮,且所述偏心轮位于所述摆动拨叉上形成的通孔内,且并带动所述摆动拨叉摆动。
13.优选的,所述摆动拨叉的自由端形成有u型槽,所述u型槽部分与所述摆臂重叠;所述连接轴限定于所述u型槽内,且所述u型槽的深度大于所述连接轴的直径且小于所述连接轴的周长。
14.优选的,所述摆臂由同轴设置的摆板和滑板组成,两者之间通过螺栓连接,且两者可沿其所在轴线相对滑动,以调节所述摆臂的长度。
15.优选的,所述摆板上设置有所述连接轴,且所述连接轴的摆动轨迹与所述滚轮的摆动轨迹相反。
16.优选的,所述滑板远离所述摆板的一端设置有两个所述滚轮,且两个所述滚轮所在轴线与所述摆臂的轴线相互垂直;所述滑板上还设置有第二固定轴,所述摆臂绕所述第二固定轴旋转。
17.优选的,所述第二固定轴与所述电机的电机轴的之间的距离大于两个所述张紧轮至所述电机的电机轴的距离。
18.优选的,所述滚轮位于两个所述张紧轮的外侧,并在所述砂带的带动下旋转。
19.优选的,所述摆臂绕所述第二枢轴左右摆动角度不超过22.5
±
0.5
°
。
20.本实用新型技术方案的优点主要体现在:
21.精度高,调节第二固定轴与连接轴之间的距离,及时调整砂带的张紧度的同时,使得滚轮表面与砂带内壁紧贴,直至砂带到产品矢量点之间的距离等于需打磨成型的倒圆角的r值,打磨过程无需调整角度和距离,有效避免抖动造成的打磨误差,保证打磨精度;
22.自动打磨,通过电机带动砂带旋转同时对产品的进行打磨,打磨角度较小,适用于棱角打磨,打磨过程无需人工干预,减小劳动力。
附图说明
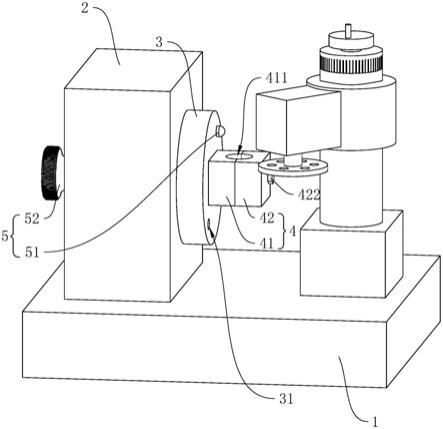
23.图1:本实用新型优选实施例的初始状态图;
24.图2:本实用新型优选实施例的左极限状态图;
25.图3:本实用新型优选实施例的摆动拨叉结构图;
26.图4:本实用新型优选实施例的摆臂结构的放大图。
具体实施方式
27.本实用新型的目的、优点和特点,将通过下面优选实施例的非限制性说明进行图示和解释。这些实施例仅是应用本实用新型技术方案的典型范例,凡采取等同替换或者等效变换而形成的技术方案,均落在本实用新型要求保护的范围之内。
28.在方案的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。并且,在方案的描述中,以操作人员为参照,靠近操作者的方向为近端,远离操作者的方向为远端。
29.如图1所示,本实用新型揭示了一种倒圆角自动磨削工装,包括壳体4,所述壳体4可外接包括机器人在内的联接装置,或在所述壳体4上设置驱动工装工作的开关等。其连接或设置方式非本实用新型的重点,在此不做赘述。所述壳体4的输出端(远离联接装置的一端)形成有开口。
30.所述壳体4中设置有控制工装启动或停止的驱动机构,所述驱动机构包括可自转地设置于的电机11,所述电机11的电机轴上设置有行星齿轮12,所述行星齿轮12上偏心设置有连接杆,该连接杆远离所述行星齿轮12的一端设置有偏心轮13,并与所述偏心轮13同
轴设置。通过所述行星齿轮12降低由所述电机11的电机轴输出的转速,并将降低的转速输出至偏心轮13上,且所述偏心轮13在所述行星齿轮12的作用力下绕所述电机11的电机轴旋转。
31.如图1至图2所示,所述电机11转轴上绕设有一旋转机构,所述旋转机构包括砂带21和设置在所述砂带21内侧并由其驱动旋转的张紧轮22。所述砂带21优选绕设于所述行星齿轮12上,且优选砂粒厚度小于0.2mm,其磨损厚度约0.1mm,由此可见,该打磨精度更高。所述砂带12通过所述张紧轮22将其张紧,避免所述砂带21因过渡松弛导致无法打磨的现象。启动所述电机11后,所述行星齿轮12带动所述砂带21旋转,进而带动所述张紧轮22旋转,减小所述砂带21的摩擦力,延长其使用寿命。
32.如图1所示,一种倒圆角自动磨削工装的壳体4内还设置有一摆动机构,所述摆动机构包括由所述驱动机构驱动的摆动拨叉31,所述摆动拨叉31的一端通过第一固定轴311连接于所述壳体4内,且所述摆动拨叉31绕所述第一固定轴311处摆动。所述第一固定轴311位于所述电机11的外侧,且靠近所述壳体4的输出端(与联接装置连接的一端)。
33.如图3所示,所述摆动拨叉31上形成有至少能容纳所述偏心轮13的通孔3101,即所述摆动拨叉31的厚度大于上述连接杆的长度。启动所述电机11后,所述行星齿轮12带动所述偏心轮13绕电机轴处旋转,进而带动所述摆动拨叉31摆动。在本实用新型中优选将所述通孔3101设计为腰型孔,初始状态下(未启动所述电机11时),所述电机11的电机轴与所述偏心轮13均设置于该腰型孔中,且此时所述电机11的电机轴与所述通孔3101的中心同轴,通孔3101的中心至所述偏心轮13的最大距离等于所述通孔3101的长度的一半。
34.如图2所示,所述摆动机构还包括由所述摆动拨叉31带动的摆臂32。所述摆臂32位于所述摆动拨叉31的自由端,且两者同轴并部分重叠设置,并在重叠部分设置有连接轴312,所述连接轴312位于所述张紧轮22的外侧,即所述摆臂32位于所述张紧轮22的外侧。所述摆臂32与所述壳体4之间通过第二固定轴3221连接,且所述摆臂32绕所述第二固定轴3221旋转,其左右摆动的角度不超过22.5
±
0.5
°
。所述第二固定轴3221与所述电机11的电机轴之间的距离大于两个所述张紧轮22至所述电机11的电机轴的距离。所述摆臂32与所述摆动拨叉31的摆动方向相对。
35.如图4所示,所述摆臂32由同轴设置的摆板321和滑板322组成,两者之间通过螺栓连接,且两者可沿其所在轴线相对滑动,以调节所述摆臂32的长度。一种可行的方式为:所述摆板321与所述滑板322上均形成有腰型孔,且该腰型孔的两条侧壁为对称设置的波浪纹,螺栓可选择地插接于任一组波纹孔中进行定位。所述第二固定轴3221设置于所述滑板322上,且位于所述滑板322的腰型孔的外端;所述连接轴312位于所述摆板321上,通过调整所述摆臂32的长度改变所述第二固定轴3221与所述连接轴312之间的距离,进而改变所述连接轴312形成的弧形轨道的弧度。
36.所述摆臂32远离所述摆动拨叉31的一端设置有两个滚轮323。通过螺栓改变所述摆臂32的长度,进而改变两个所述滚轮323至所述砂带21、所述第二固定轴3221与所述连接轴312之间的距离,直至所述滚轮323与所述砂带21内壁贴合,进一步张紧所述砂带21;再次调整到待打磨的产品的矢量点与所述砂带21之间的距离等于需打磨形成的圆倒角的r值,可实现r1-r10的角焊缝打磨。所述滚轮323位于所述滑板322远离所述摆板321的一端,且两个所述滚轮323所在轴线与所述摆臂32的轴线相互垂直。所述连接轴312的摆动轨迹与所述
滚轮323的摆动轨迹相反。所述滚轮323位于两个所述张紧轮22之间,并与所述砂带21同步旋转。
37.如图3所示,所述摆动拨叉31的自由端位于所述张紧轮22的外侧(与所述电机11相对的一侧),且其上形成有u型槽3102。结合图2至图3所示,所述u型槽3102部分与所述摆臂32重叠;所述连接轴312位于所述u型槽3102的内,且所述u型槽3102的深度大于所述连接轴312的直径且小于所述连接轴312的周长,以保证摆动时两者不会脱离,通过所述u型槽3102限定所述连接轴312的摆动幅度。
38.下面简述一下本实用新型的步骤:
39.s1:调整连接轴312与第二固定轴3221之间的距离,滚轮323内壁与砂带内壁紧贴;
40.s2:进一步调整,使砂带21与待打磨的产品的矢量点之间的距离等于需打磨形成的圆倒角的r值;
41.s3:启动电机11,带动砂带21,张紧轮22以及滚轮323旋转;
42.s4:电机11驱动行星齿轮12和偏心轮13旋转,进而带动摆动拨叉31绕第一固定轴311摆动;
43.s5:摆动拨叉31带动摆臂32绕第二固定轴3221摆动,进一步带动设置在摆臂32上的滚轮323摆动,同时对产品的棱角进行打磨。
44.本实用新型尚有多种实施方式,凡采用等同变换或者等效变换而形成的所有技术方案,均落在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。